Rancang Bangun Sistem Kontrol Kelembaban Udara Greenhouse Menggunakan PWM (Pulse Width Modulation)
on
JURNAL BETA (BIOSISTEM DAN TEKNIK PERTANIAN) Program Studi Teknik Pertanian, Fakultas Teknologi Pertanian Universitas Udayana
http://ojs.unud.ac.id/index.php/beta
Volume 11, Nomor 1, bulan April, 2023
Rancang Bangun Sistem Kontrol Kelembaban Udara Greenhouse Menggunakan PWM (Pulse Width Modulation)
The Development of Greenhouse Air Humidity Control System Using PWM (Pulse Width Modulation)
Wily Goldramijaya, Ni Nyoman Sulastri*, I Made Anom S. Wijaya, I Putu Gede Budisanjaya Program Studi Teknik Pertanian dan Biosistem, Fakultas Teknologi Pertanian, Universitas Udayana, Badung, Bali, Indonesia
*Email: Sulastri@unud.ac.id
Abstrak
Sistem kontrol banyak diterapkan pada bidang pertanian seperti penggunaan mikrokontroler dalam mengontrol dan memantau kondisi kelembaban udara dalam greenhouse. Ketepatan pengkondisian kelembaban udara merupakan hal penting bagi pertumbuhan dan perkembangan tanaman seperti microgreen. Kelembaban media tanam secara tidak langsung mempengaruhi kelembaban udara melalui penguapan, sehingga diperlukan sistem yang dapat mengontrol dan memantau kelembaban udara sekaligus kelembaban media tanam. Penelitian ini bertujuan untuk merancang dan membangun sistem kontrol kelembaban udara menggunakan PWM (Pulse Width Modulation) dalam greenhouse yang dilengkapi sistem monitoring dan pemberian irigasi otomatis. Rancang bangun sistem yang dihasilkan pada penelitian ini meliputi penggunaan Arduino UNO ATmega328P sebagai mikrokontroler yang terhubung dengan sensor DHT22 sebagai sensor kelembaban udara, capacitive soil moisture sensor sebagai sensor kelembaban media tanam, relay sebagai kontrol pompa misting dan irigasi, driver sebagai pengendali kipas DC dengan kontrol PWM, kipas DC sebagai pemberi aliran udara dan menurunkan kelembaban udara, dan LCD 16x2 sebagai sistem monitoring. Sistem menggunakan setting point kelembaban udara untuk microgreen yang dimasukan secara manual melalui coding. Sistem yang dirancang menghasilkan miniatur greenhouse bertipe lean-to yang dilengkapi oleh sensor DHT22 dengan nilai error kelembaban udara DHT22(1) 3,09% dan DHT22(2) 3,34%. Sistem berhasil membaca dan menampilkan data, dan memberikan output dengan response time sistem irigasi dan misting sebesar 78mS dan 145mS, dengan delay 2 detik. Kendali PWM kipas DC mampu menurunkan dan menjaga kelembaban udara tetap pada rentang optimal bagi pertumbuhan microgreen, dengan meningkatkan dan menurunkan nilai RPM kipas DC sesuai dengan nilai duty cycle nya.
Kata Kunci: pulse width modulation, kelembaban udara, microgreen, greenhouse, arduino.
Abstract
Control systems are widely applied in agriculture, such as using microcontrollers to control humidity in greenhouses. Lack of accuracy in conditioning the humidity in indoor farming affects plant growth and productivity, especially in microgreens. The humidity of the planting media indirectly affects the air humidity through evaporation. Therefore, a system is required to control and monitor air and planting media humidity. The purpose of this study was to design and build an air humidity control system using PWM (Pulse Width Modulation) in a greenhouse equipped with a monitoring and automatic irrigation system. The system control employed Arduino UNO ATmega328P as a microcontroller connected to the DHT22 sensor as an air humidity sensor, a capacitive soil moisture sensor as a humidity sensor for the planting media, relay to control misting and irrigation pump. The microcontroller was also connected to a driver as a DC fan control with PWM control, four DC fan as airflow suppliers and dehumidifiers, and LCD 16x2 as a monitoring system. The system used the air humidity setting points for microgreens which were entered manually through coding. The result of this research was a lean-to greenhouse prototype with a DHT22 sensor with air humidity error values of DHT22(1) 3.09% and DHT22(2) 3.34%. The system successfully read and displayed data and provided output with a response time of irrigation and misting systems of 78mS and 145mS, using a delay of 2 seconds. The PWM control of the DC fan was able to reduce and maintain the air humidity within the optimum range for microgreen growth by increasing as well as decreasing the DC fans’ RPM, which was based on its duty cycle value.
Keywords: pulse width modulation, air humidity, microgreen, greenhouse, arduino
PENDAHULUAN
Sistem kontrol menjadi salah satu bagian dari kehidupan yang banyak ditemukan pada industri, salah satunya pertanian seperti penggunaan mikrokontroler (Indriani et al., 2017). Diperlukan ketelitian dalam proses industri seperti mengontrol kelembaban (Yudaningtyas, 2017). Saat ini penggunaan teknologi sistem kontrol dalam menerapkan otomatisasi masih menggunakan metode kontrol on-off saja (Karsid et al., 2018). Dalam mengontrol iklim mikro seperti kelembaban diperlukan setting point sebagai batas atau rentang minimum dan maksimum kelembaban yang diinginkan. Kontrol on-off memiliki kelemahan yaitu tidak mampu mencapai titik kestabilan karena tidak mampu mencapai titik setting point, namun hanya berosilasi di sekitar setting point (Hutabarat, 2018). Pada sistem kontrol on/off hanya bekerja dengan dua kondisi yaitu posisi high (on) dan posisi low (off), tidak akan pernah bekerja di daerah 0% sampai 100% (Megido & Ariyanto, 2016).
Dalam teknologi pengontrolan terdapat metode lain selain kontrol on-off yaitu PWM (Pulse Width Modulation) (Megido & Ariyanto, 2016). PWM merupakan salah satu teknik modulasi dengan mengubah lebar pulsa atau duty cycle dengan nilai amplitudo dan frekuensi yang tetap (Ripai & Wibowo, 2016). Arduino menyediakan fasilitas PWM pada pin digitalnya. Pengaplikasian kontrol PWM salah satunya digunakan untuk mengatur kecepatan motor DC. Kontrol PWM mampu bekerja dengan rentang 0% sampai 100%, sehingga banyak variasi kecepatan pada motor DC. Pada penelitian yang dilakukan oleh Arifin dan Fathoni (2014), menggunakan PWM dalam mengontrol kecepatan motor pada robot dapat bergerak dengan baik sesuai instruksi. Selain itu, penelitian yang dilakukan oleh Karsid et al (2018), menggunakan PWM pada mesin penetas telur otomatis dan membandingkan antara penggunaan kontrol PWM dengan kontrol on-off, dimana kontrol PWM memberikan hasil yang baik dari segi konsumsi daya dan grafik yang stabil dalam mencapai setting point dibandingkan dengan kontrol on-off.
Sistem kontrol PWM pada penelitian ini akan diaplikasikan menggunakan setting point kelembaban udara microgreen di dalam greenhouse. Microgreen merupakan tanaman yang layak konsumsi dan dipanen diantara fase perkecambahan dan babygreen yang berusia sekitar 7 sampai 14 hari setelah semai (As’adiya & Murwani, 2021). Produksi microgreen biasanya dilakukan di dalam greenhouse yang berteknologi, dikarenakan memerlukan perlindungan dari faktor lingkungan (Anonim, 2017;
Renna et al., 2017). Hal ini dikarenakan, greenhouse mampu memberikan faktor lingkungan yang mendekati optimum bagi pertumbuhan tanaman (Alahudin, 2013).
Kelembaban udara merupakan salah satu faktor yang penting bagi pertumbuhan dan perkembangan tanaman. Kelembaban udara yang terlalu rendah akan menyebabkan laju transpirasi yang tinggi, sehingga akan terjadi kehilangan air pada tanaman, dan sebaliknya kelembaban yang tinggi akan mengakibatkan penurunan penyerapan unsur hara (Nurnasari & Djumali, 2016). Selain kelembaban udara, kelembaban media tanam yang juga memiliki pengaruh dalam pertumbuhan tanaman dan secara tidak langsung mempengaruhi kelembaban udara melalui penguapan. Seiring peningkatan kelembaban pada media tanam akan berdampak pada peningkatan persentase pertumbuhan penyakit seperti jamur (Apriast et al., 2015).
Permasalahan penyakit seperti jamur sering sekali terjadi pada tanaman akibat dari kondisi kelembaban yang tinggi, khususnya microgreen (Nolan, 2018) karena kerapatan benih yang berdekatan sehingga kelembaban akan terperangkap. Hal tersebut menandakan bahwa microgreen sangat sensitif terhadap kelembaban, baik kelembaban udara maupun kelembaban media tanam. Pengendalian kelembaban dalam greenhouse microgreen dapat dilakukan dengan pemberian aliran udara, sehingga dapat mencegah jamur tumbuh di microgreen (Grooms, 2020). Aliran udara dapat diberikan dengan penerapan kipas yang dikontrol di dalam greenhouse.
Dalam penelitian ini akan berfokus pada rancang bangun sistem kontrol kelembaban udara dengan tujuan merancang dan membangun sistem kontrol, serta menguji kinerja alat yang dibangun. Sistem kontrol pada penelitian ini menggunakan PWM sebagai dasar metode kontrol kecepatan pada kipas DC. Kipas berperan sebagai pemberi aliran udara dan menurunkan kelembaban udara pada greenhouse yang bertujuan untuk menjaga kelembaban udara tetap pada setting point optimal. Penelitian akan menggunakan setting point microgreen sebagai penentu rentang kelembaban udara yang optimal. Sistem dilengkapi oleh sistem misting sebagai pemberian kelembaban udara dan irigasi secara on/off otomatis.
METODE PENELITIAN
Tempat dan Waktu Penelitian
Penelitian ini dilakukan di Laboratorium Pengelolaan Sumber Daya Alam dan Laboratorium Sistem Manajemen Keteknikan Pertanian, Fakultas
Teknologi Pertanian, Universitas Udayana, Kampus Sudirman. Pelaksanaan penelitian ini dilakukan pada bulan Maret 2022 sampai dengan bulan Mei 2022.
Bahan dan Alat
Bahan yang digunakan pada penelitian ini adalah Arduino UNO ATmega328P, 2 buah sensor DHT22, Capacitive Soil Moisture Sensor, relay 2 channel 5V, pompa DC 12V, pompa AC 220V, 4 buah kipas DC 12V, regulator step down DC-DC LM2596, 4 buah driver motor DC (transistor NPN, resistor, dioda, kapasitor), LCD 16x2, besi hollow, plastik UV, power supply DC 12V, breadboard, nozzle misting, tray, cocopeat, serta beberapa komponen pendukung. Alat yang dibutuhkan, yaitu laptop, multimeter, solder, osiloskop, tachometer, hygro-thermometer, soil survey instrument, stopwatch, perangkat lunak Arduino IDE, Google SketchUp, fritzing, serta alat pendukung lainnya.
Diagram Alir Penelitian
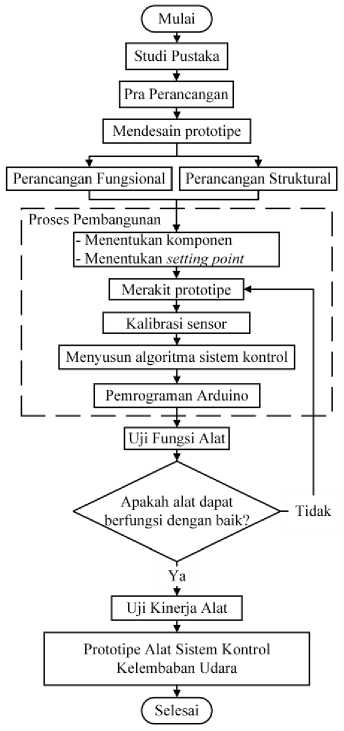
Konsep dasar perancangan sistem kontrol kelembaban udara menggunakan PWM akan dilakukan dengan tahap – tahap yang dapat dilihat pada diagram alir penelitian yang disajikan pada Gambar 1. Tahapan awal penelitian dilaksanakan dengan studi pustaka sebagai dasar pengkajian dan pemahaman mengenai PWM, greenhouse,
microgreen dan proses pengendalian kelembaban menggunakan Arduino UNO.
Rancangan Sistem Kontrol Kelembaban Udara Sistem kontrol kelembaban udara yang akan dibangun terdiri dari beberapa perangkat keras yaitu
Gambar 1. Diagram Alir Penelitian
unit kontrol, unit sensor, aktuator, dan unit pemantauan, serta komponen penunjang lainnya yang dapat dilihat pada Gambar 2.
(c)
(d)
(b)
(a)
(e)
(f)
(k)
(j)
(g)
(i)
(h)
Gambar 2. Desain Rancangan Prototipe Sistem kontrol Kelembaban Udara
Keterangan: (a) Pompa Misting, (b) Sumber Air, (c) Pompa Irigasi, (d) Sumber Listrik, (e) Unit Kontrol, (f) Capacitive Soil Moisture Sensor, (g) Struktur Miniatur Greenhouse, (h) Tray, (i) Kipas DC, (j) Sensor DHT22, dan (k) Nozzle Misting.
Sistem kontrol akan diterapkan pada miniatur greenhouse sebagai batasan ruang kerja untuk sistem dengan lingkungan luar. Pada unit kontrol
menggunakan Arduino UNO ATmega328P sebagai mikrokontroler yang akan mengatur kerja dari perangkat keras yaitu unit sensor, unit kendali
(aktuator), dan unit pemantauan. Agar mikrokontroler dapat mengatur kerja dari perangkat keras diperlukan perangkat lunak (pemrograman). Unit kontrol akan diprogram menggunakan perangkat lunak Arduino IDE, sehingga dapat bekerja menjalankan pengontrolan kelembaban udara.
Rancangan Fungsional dan Struktural
Rancangan Perangkat keras pada penelitian ini menggunakan Arduino UNO ATmega328P sebagai mikrokontroler. Mikrokontroler terhubung dengan 2 buah sensor DHT22 sebagai pengukur kelembaban udara, capacitive soil moisture sensor sebagai pengukur kelembaban media tanam yaitu cocopeat. Relay 2 channel sebagai pengendali on/off aktuator yaitu pompa AC untuk irigasi dan pompa DC untuk misting, 4 buah driver motor DC yang dikendalikan oleh pin PWM Arduino UNO sebagai pengendali kecepatan atau revolusi per menit (rpm) pada 4 buah kipas DC (2 blower dan 2 exhaust), serta LCD 16x2 bertugas menampilkan data kelembaban udara, kelembaban media tanam, dan nilai duty cycle dari kipas DC. Sebagai batasan ruang kerja sistem, sistem kontrol tersebut diterapkan pada miniatur greenhouse yang bertipe
lean-to berdimensi panjang 60 cm, lebar 40 cm, tinggi (1) 35 cm, tinggi (2) 63 cm, dan kemiringan atap 35o, yang dibangun menggunakan besi hollow 2 cm x 2 cm dan ditutup oleh plastik UV. Dengan dimensi tersebut, miniatur greenhouse memiliki kebutuhan aliran udara minimal sebesar 4,15 CFM
(Cubic Feet per Minute) yang didapatkan dengan
persamaan sebagai berikut (Buffington et al.,
2019),
CFM =
CFM
Volume Ruangan x ACH
60
: ft3/menit
[1]
Volume Ruangan : Luas Alas x Tinggi (ft3)
ACH : Air Change Per Hour
Bangunan greenhouse biasanya membutuhkan pergantian udara (ACH) 1 kali setiap menit atau 60 kali dalam satu jam (Buffington et al., 2019). Air Change Per Hour (ACH) merupakan sebuah pengukuran berapa kali volume udara pada suatu ruangan akan dipindahkan, ditambahkan, dihilangkan atau ditukar dengan udara bersih yang baru (Frey, 2020). Nilai CFM minimum tersebut digunakan sebagai dasar penentu spesifikasi penggunaan kipas pada greenhouse. Adapun rangkaian perangkat keras sistem dapat dilihat pada Gambar 3.
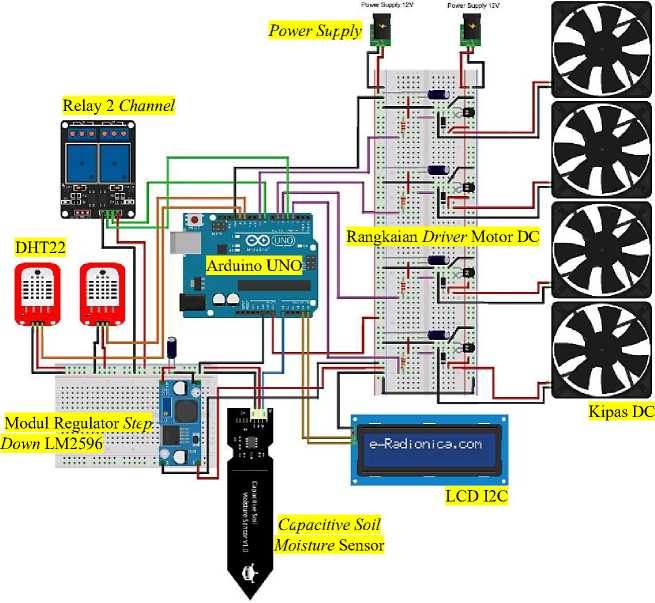
Gambar 3. Rangkaian Breadboard Perangkat Keras
Rancangan Perangkat Lunak Sistem
Proses perancangan sistem pembacaan data sensor, menampilkan data pada LCD, dan mengeksekusi data menjadi output sistem diprogram menggunakan
Arduino IDE yang di-compile pada mikrokontroler Arduino UNO. Dalam mengeksekusi data menjadi output sistem yaitu menyalakan dan mematikan aktuator (pompa misting dan irigasi) dibutuhkan nilai
setting point. Rentang optimal nilai kelembaban udara microgreen 40% (KU_Min) sampai 80% (KU_Max) akan menjadi setting point untuk menyalakan atau mematikan pompa misting dan menjadi nilai yang mempengaruhi besaran nilai duty cycle pada kipas DC. Rentang nilai kelembaban udara akan dipetakan ulang menjadi nilai duty cycle
60 sampai 255 menggunakan fungsi map() pada Arduino IDE. Nilai kelembaban media tanam akan menjadi nilai setting point dalam menyalakan dan mematikan pompa irigasi secara otomatis. Nilai setting point tersebut dimasukan secara manual melalui coding. Adapun diagram alir program atau perangkat lunak dapat dilihat pada Gambar 4.
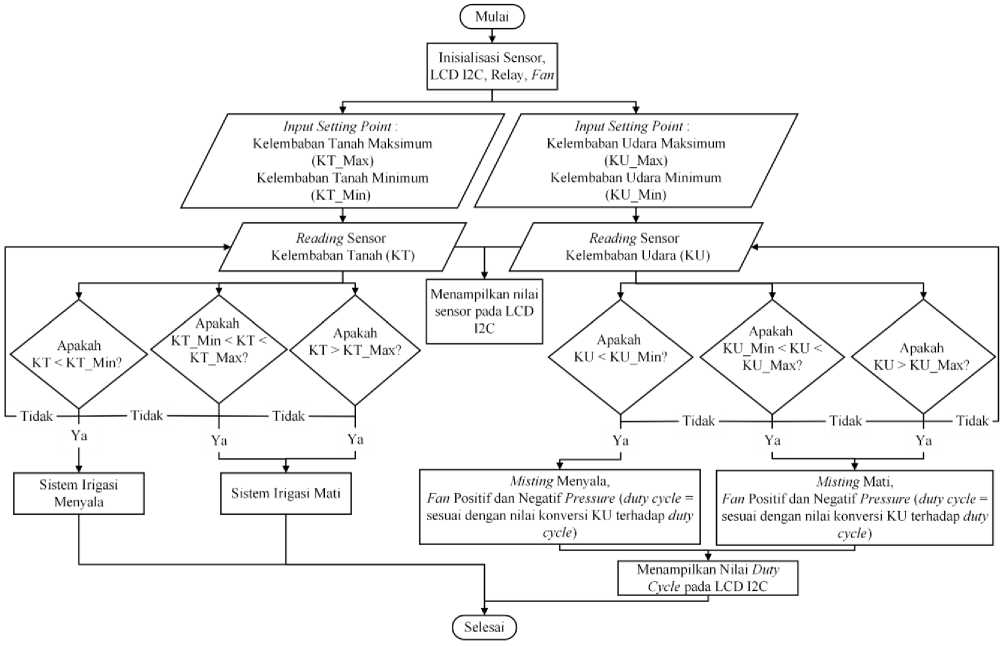
Gambar 4. Diagram Alir Perangkat Lunak
Uji Fungsi
Dalam pengujian fungsi dilaksanakan pada ruang ber AC (Air Conditioner) yang bersuhu terjaga yaitu 25oC sampai 27oC.
-
1) Validasi Sensor
Validasi pada sensor kelembaban udara dengan membandingkan data kelembaban yang terukur oleh sensor DHT22 dengan higrometer. Perbandingan data akan dilakukan untuk mengetahui nilai error sensor DHT22. Sebagai indikator keberhasilan alat, maka persentase error sensor DHT22 pada alat yang dirancang diharapkan memiliki nilai error ±2-5% RH sesuai dengan datasheet. Untuk mengukur nilai error sensor menggunakan rumus sebagai berikut:
Error =
Nilai Sensor - Nilai Alat Ukur Nilai Alat Ukur
| % 100%
[2]
-
2) Pengujian Fungsi PWM, Driver Motor DC, dan Kipas DC
Uji fungsi PWM dilakukan menggunakan osiloskop untuk mengetahui teknik modulasi pulsa yang dihasilkan oleh mikrokontroler bekerja dengan baik.
Uji fungsi pada driver motor DC dan kipas DC dilakukan dengan mencari nilai tegangan, arus, daya dan rpm (revolusi per menit). Pengujian tersebut dilakukan menggunakan multimeter dan tachometer pada beberapa titik nilai duty cycle (D) yaitu 64 (25%), 128 (50%), 191 (75%), 255 (100%). Tujuan dari pengujian untuk mengetahui apakah nilai tegangan, arus, dan daya yang diukur sesuai dengan nilai perhitungan menggunakan persamaan. Dalam mencari nilai tegangan dan arus, input (Vin Iin) dan output (Vout Iout) menggunakan multimeter diukur pada rangkaian sebelum dan setelah driver motor DC (transistor). Nilai hasil pengukuran tersebut nantinya dibandingkan dengan nilai output tegangan dan arus, dan mencari nilai daya yang didapatkan dari hasil perhitungan menggunakan persamaan. Berikut konsep PWM dalam mengendalikan keluaran tegangan listrik dapat dirumuskan sebagai berikut (Ginting et al., 2014):
Vout = D x Vin [3]
Iowt = D x Iin [4]
P= Kout x I [5]
Uji Kinerja Alat
Dalam pengujian kinerja dilaksanakan pada ruang ber AC (Air Conditioner) yang bersuhu terjaga yaitu 25oC sampai 27oC.
-
1) Uji Sistem Kendali
Pengujian misting, irigasi, dan pemberian aliran udara (kipas dengan PWM) atau keseluruhan sistem dilakukan dengan pengkondisian kelembaban dalam greenhouse untuk menciptakan kondisi yang memenuhi decision pada diagram alir perangkat lunak (Gambar 4). Selain itu, pengujian ini dilakukan untuk mendapatkan grafik hubungan fungsi Map() antara duty cycle dengan kenaikan kelembaban dari 40% - 80%. Kemudian didapatkan juga grafik
penurunan kelembaban ketika misting sudah mati yaitu kelembaban dari 80% dan diukur waktu penurunannya.
-
2) Response Time Testing
Response Time merupakan waktu yang dibutuhkan pada suatu titik dalam sistem dalam merespon atau menanggapi permintaan dari titik lain dalam sistem tersebut. Pengujian ini bertujuan untuk mengetahui berapa lama waktu yang diperlukan sistem dalam menanggapi kondisi eksternal yang diberikan terhadap sistem. Pengukuran response time dilakukan ketika unit sistem (sensor) mengirimkan data untuk diproses ke Arduino UNO sampai proses
tersebut memberikan tanggapan berupa menyalakan atau mematikan pompa irigasi dan misting.
HASIL DAN PEMBAHASAN
Prototipe Sistem Kontrol Kelembaban Udara Greenhouse
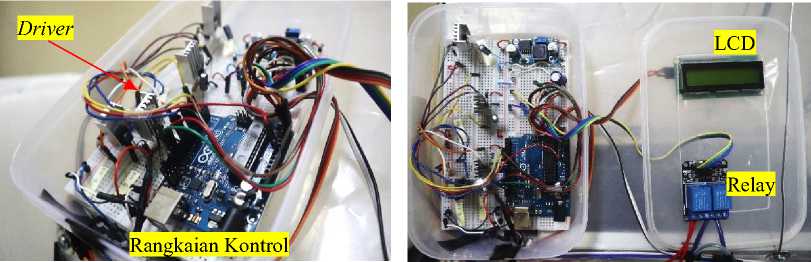
Hasil dari perancangan perangkat keras adalah sistem kontrol kelembaban udara greenhouse yang dapat dilihat pada Gambar 5 yang terdiri dari unit kontrol, unit sensor, aktuator, unit pemantauan, dan miniatur greenhouse serta komponen penunjang lainnya. Miniatur greenhouse yang dibuat bertipe lean-to berdimensi panjang 60 cm, lebar 40 cm, tinggi (1) 35 cm, tinggi (2) 63 cm, dan kemiringan atap 35o. Miniatur greenhouse dibangun menggunakan besi hollow berukuran 2 cm x 2 cm dan ditutup menggunakan plastik UV dengan ketebalan 0,06 mm pada bagian atap dan dinding prototipe tersebut. Miniatur greenhouse digunakan untuk meletakan perangkat keras seperti unit kontrol dan perangkat keras lainnya seperti sensor 2 buah DHT22, capacitive soil moisture sensor, 4 buah kipas DC (2 blower dan 2 exhaust) berspesifikasi 12V 0,3A dengan RPM maksimum 2300 dan nilai CFM 53, tray, dan nozzle misting, serta memberikan batasan ruang kerja untuk sistem dengan lingkungan luar prototipe.
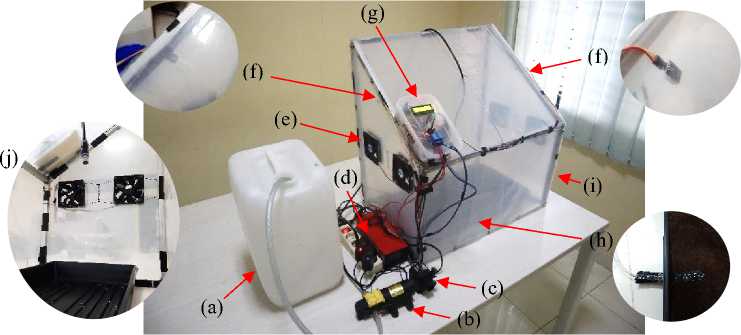
Gambar 5. Prototipe Sistem Kontrol Kelembaban Udara Greenhouse
Keterangan: (a) Sumber Air, (b) Pompa Misting, (c) Pompa Irigasi, (d) Sumber Listrik, (e) Kipas DC, (f) Sensor DHT22, (g) Unit Kontrol, (h) Capacitive Soil Moisture Sensor, (i) Miniatur Greenhouse, dan (j) Bagian Dalam.
Hasil Rangkaian Perangkat Keras
Unit kontrol terdiri dari papan Arduino UNO ATmega328P sebagai mikrokontroler yang berfungsi membaca data yang diterima oleh 2 buah sensor kelembaban udara DHT22 melalui pin digital D13 dan D12, membaca data capacitive soil moisture sensor melalui pin analog A0, mengontrol nyala LCD 16x2 yang terhubung dengan pin analog A4 dan A5,
mengontrol on/off pompa misting dan irigasi melalui relay pada pin digital D4 dan D8, mengontrol 4 buah driver motor DC menggunakan PWM pada pin digital PWM D3, D5, D6, dan D9. Arduino terhubung ke seluruh ground komponen melalui pin GND serta ditenagai oleh adaptor bertegangan 12V melalui pin VIN. Adapun perangkat keras unit kontrol dapat dilihat pada Gambar 6.
-
Gambar 6. Perangkat Keras Unit Kontrol
Hasil Rancangan Perangkat Lunak Sistem
Perangkat lunak sistem diprogram dengan Arduino IDE yang berfungsi untuk memprogram sistem atau Arduino untuk membaca data sensor, mengendalikan relay, dan mengendalikan nilai duty cycle kipas DC. Adapun kode pemrogramannya dinyatakan sebagai berikut.
// Misting
if(kelembabanrata<kelembaban_udara_min){ digitalWrite(misting, LOW);
analogWrite(DcMotor1, PWMpositive);
analogWrite(DcMotor2, PWMpositive);
analogWrite(DcMotor3, PWMnegative);
analogWrite(DcMotor4, PWMnegative);
}
#define DHTTYPE DHT22
uint8_t pinDHT1 = 12;
DHT dht1(pinDHT1, DHTTYPE);
uint8_t pinDHT2 = 13;
DHT dht2(pinDHT2, DHTTYPE);
// Soil Sensor
int soilsensor = A0;
//Reading Sensor DHT22
float kelembaban_udara1;
float kelembaban_udara2;
float kelembabanrata;
kelembaban_udara1 = dht1.readHumidity();
kelembaban_udara2 = dht2.readHumidity();
kelembabanrata = ((kelembaban_udara1 + kelembaban_udara2)/2);
//Reading Sensor tanah
int nilai_sensor;
nilai_sensor = analogRead(soilsensor);
//Setting point kelembaban udara
const float kelembaban_udara_max = 80.00;
const float kelembaban_udara_min = 40.00;
//Set Point kelembaban media tanam
//Irigasi
// kondisi 1 Irigasi Nyala
if(nilai_sensor >= Nilai_Dry){ digitalWrite(irigasi, LOW);
}
// kondisi 2 Irigasi Mati
if(nilai_sensor <= Nilai_Wet){ digitalWrite(irigasi, HIGH);
}
//Map for DHT22 Value to PWM Value
float PWMDHT22 = ((kelembaban_udara1 +
kelembaban_udara2)/2);
if(PWMDHT22 > 80.00){
PWMDHT22 = 80.00;
}
if(PWMDHT22 < 40.00){
PWMDHT22 = 40.00;
}
int PWMpositive = map(PWMDHT22, 40, 80, 60,
255);
int PWMnegative = map(PWMDHT22, 40, 80, 60,
255);
elseif((kelembaban_udara_min<kelembabanrata)& &(kelembabanrata < kelembaban_udara_max)){
analogWrite(DcMotor1,PWMpositive); analogWrite(DcMotor2,PWMpositive); analogWrite(DcMotor3,PWMnegative); analogWrite(DcMotor4,PWMnegative); }
elseif(kelembabanrata>kelembaban_udara_max){ digitalWrite(misting, HIGH);
analogWrite(DcMotor1,PWMpositive); analogWrite(DcMotor2,PWMpositive); analogWrite(DcMotor3,PWMnegative); analogWrite(DcMotor4,PWMnegative); }
// LCD I2C
#include <LiquidCrystal_I2C.h> LiquidCrystal_I2C lcd(0x27, 16, 2);
// LCD
lcd.setCursor(0,0);lcd.print("HT:");
lcd.setCursor(7,0);lcd.print("HU:");
lcd.setCursor(10,0);lcd.print(kelembabanrat a);
lcd.setCursor(15,0);lcd.print("%");
lcd.setCursor(0,1);lcd.print("-PWM:"); lcd.setCursor(8,1);lcd.print("+PWM:"); lcd.setCursor(13,1);lcd.print(PWMpositive); lcd.setCursor(5,1);lcd.print(PWMnegative);
Pengujian fungsi Sensor DHT22
Dalam mencari nilai error kelembaban udara digunakan alat ukur Digital Thermo-Hygrometer model 303C sebagai nilai pembanding dengan DHT22. Data sampel kelembaban udara diambil setiap 2 detik dalam 10 menit, sehingga dalam 1 menit ada 30 data. Setiap 30 data dalam 1 menit nilai data dibuat rata – rata, sehingga hasil error menjadi 10 data dalam 10 menit. Adapun hasil pengukuran nilai error dapat dilihat pada Tabel 1. Dari hasil data pengukuran kelembaban udara menggunakan 2 (dua) buah DHT22 dan alat ukur, didapatkan besar rata -rata error pengukuran kelembaban udara sensor DHT22(1) adalah 3,3% dan DHT22(2) adalah 4,06%, dengan kisaran kerja dari pada sensor kelembaban udara yaitu 0% RH - 100% RH, dengan kepekaan atau sensitivitas 0,1% RH.
Tabel 1. Hasil Rata - rata Pengujian Error Sensor Kelembaban Udara DHT22
|
No |
Menit Ke- |
DHT22 (1) (%) |
DHT22 (2) (%) |
Alat Ukur (%) |
Selisih (1) (%) |
Selisih (2) (%) |
Error (1) (%) |
Error (2) (%) |
|
1 |
1 |
60,96 |
60,96 |
59,00 |
1,96 |
1,96 |
3,33 |
3,32 |
|
2 |
2 |
60,94 |
61,09 |
59,00 |
1,94 |
2,09 |
3,28 |
3,54 |
|
3 |
3 |
60,90 |
61,03 |
59,00 |
1,90 |
2,03 |
3,23 |
3,44 |
|
4 |
4 |
60,75 |
61,04 |
59,00 |
1,75 |
2,04 |
2,97 |
3,45 |
|
5 |
5 |
60,76 |
60,95 |
59,00 |
1,76 |
1,95 |
2,99 |
3,31 |
|
6 |
6 |
60,76 |
60,86 |
59,00 |
1,76 |
1,86 |
2,98 |
3,16 |
|
7 |
7 |
60,72 |
60,80 |
59,00 |
1,72 |
1,80 |
2,91 |
3,05 |
|
8 |
8 |
60,72 |
60,86 |
59,00 |
1,72 |
1,86 |
2,91 |
3,15 |
|
9 |
9 |
60,87 |
61,04 |
59,00 |
1,87 |
2,04 |
3,17 |
3,46 |
|
10 |
10 |
60,85 |
61,05 |
59,00 |
1,85 |
2,06 |
3,14 |
3,49 |
|
Rata - |
rata |
1,82 |
1,97 |
3,09 |
3,34 |
Pengujian Fungsi Sistem Kendali
Pengujian ini berlangsung pada pin digital D9, D6, D5, dan D3 PWM Arduino UNO dan keempat driver motor DC yang diberikan beban berupa kipas DC 12V 0,3A. Setiap 2 kipas diberikan daya 12V 1A yang dialirkan melalui transistor NPN BD139 sebagai saklar. Pengukuran menggunakan osiloskop dilakukan dengan menghubungkan hook probe pada pin digital PWM yang terhubung dengan driver atau pin base transistor NPN BD139, kemudian kabel ground alat pada ground mikrokontroler. Pengujian dilakukan pada setiap duty cycle 25%, 50%, 75%, dan 100%.
-
a) Karakteristik Pulse Wave pada Pin Digital PWM Arduino UNO.
Hasil karakteristik gelombang pulsa yang dihasilkan oleh mikrokontroler, dianalisis berdasarkan bentuk dan spesifikasi gelombang. Bentuk dan spesifikasi gelombang pulsa diukur menggunakan Digital
Storage Oscilloscope MDS-9060 60MHz. Gelombang pulsa yang dihasilkan memiliki perbedaan bentuk pada setiap duty cycle.
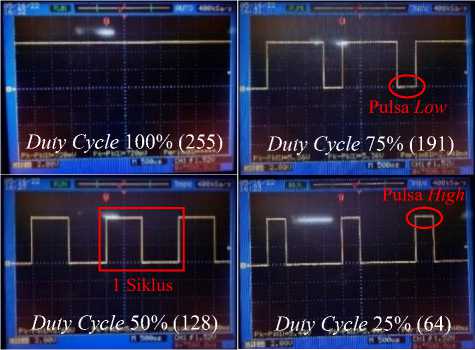
Gambar 7. Bentuk Gelombang PWM
Tabel 2. Hasil Pengujian pada Output dan Input Driver
|
Driver |
D |
V in |
A in |
Hasil Pengukuran |
Hasil Perhitungan | ||||
|
V out |
A out |
Daya |
V out |
A in |
Daya | ||||
|
1 |
25% |
11,98 |
0,26 |
2,23 |
0,03 |
0,07 |
3,00 |
0,07 |
0,19 |
|
(Pin D9) |
50% |
11,91 |
0,26 |
4,93 |
0,10 |
0,49 |
5,96 |
0,13 |
0,77 |
|
75% |
11,76 |
0,26 |
7,73 |
0,17 |
1,31 |
8,82 |
0,20 |
1,72 | |
|
100% |
11,64 |
0,26 |
10,12 |
0,22 |
2,23 |
11,64 |
0,26 |
3,03 | |
|
2 |
25% |
11,95 |
0,26 |
2,15 |
0,03 |
0,06 |
2,99 |
0,07 |
0,19 |
|
(Pin D6) |
50% |
11,83 |
0,26 |
5,35 |
0,11 |
0,59 |
5,92 |
0,13 |
0,77 |
|
75% |
11,63 |
0,26 |
8,38 |
0,18 |
1,51 |
8,72 |
0,20 |
1,70 | |
|
100% |
11,50 |
0,26 |
10,42 |
0,23 |
2,40 |
11,50 |
0,26 |
2,99 | |
|
3 |
25% |
11,85 |
0,26 |
2,13 |
0,03 |
0,06 |
2,96 |
0,07 |
0,19 |
|
(Pin D5) |
50% |
11,75 |
0,26 |
5,30 |
0,11 |
0,58 |
5,88 |
0,13 |
0,76 |
|
75% |
11,55 |
0,26 |
8,33 |
0,19 |
1,58 |
8,66 |
0,20 |
1,69 | |
|
100% |
11,51 |
0,26 |
10,38 |
0,24 |
2,49 |
11,51 |
0,26 |
2,99 | |
|
4 |
25% |
1173 |
0,26 |
2,03 |
0,03 |
0,06 |
2,93 |
0,07 |
0,19 |
|
(Pin D3) |
50% |
11,61 |
0,26 |
4,89 |
0,10 |
0,49 |
5,81 |
0,13 |
0,75 |
|
75% |
11,63 |
0,26 |
7,75 |
0,16 |
1,24 |
8,72 |
0,20 |
1,70 | |
|
100% |
11,35 |
0,26 |
9,89 |
0,21 |
2,08 |
11,35 |
0,26 |
2,95 | |
Semakin besar nilai duty cycle, maka bentuk dari pulsa high atau pulsa positif akan semakin lebar, sementara pulsa low atau pulsa negatif akan semakin menyempit yang dapat dilihat pada Gambar 7. Pada duty cycle 100% hanya akan membentuk sinyal lurus dengan nilai tegangan yang searah 5V sesuai dengan nilai tegangan pada pin digital Arduino. Dari hasil pengukuran menggunakan osiloskop, menunjukan bahwa semakin besar nilai duty cycle, maka tegangan efektif (Vrms) yang dihasilkan oleh Arduino UNO pada pin digital PWM akan semakin besar. Pada duty cycle 100% tidak terdapat periode dan frekuensi, karena lebar pulsa high bernilai 100% dan pulsa low bernilai 0%, sehingga tidak terbentuk gelombang hanya sebuah sinyal listrik DC yang konstan.
-
b) Pengukuran dan Perhitungan Tegangan (volt), Arus (ampere), dan Daya (watt)
Pengukuran tegangan dan arus dilakukan pada keempat driver pada komponen dioda yang
merupakan output driver. Hasil dari pengukuran dan perhitungan dapat dilihat pada
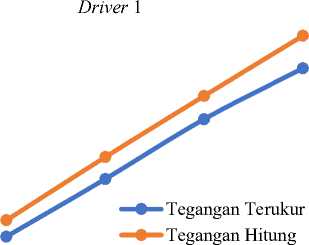
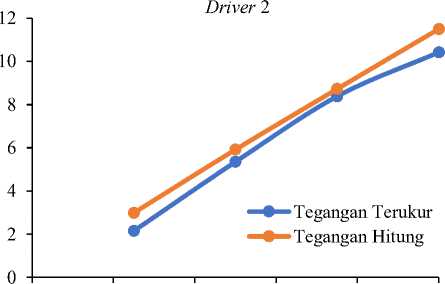
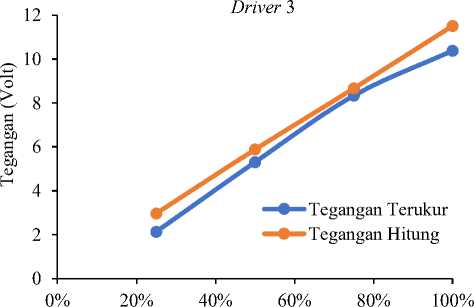
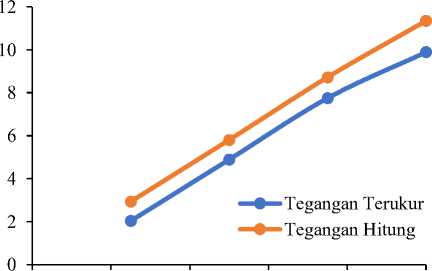
Tabel 2. Keempat pengujian pada driver yang berbeda, terdapat perbedaan antara hasil pengukuran dengan perhitungan pada tegangan (drop voltage) dan arus pada setiap duty cycle. Perbedaan pengukuran dengan perhitungan kemungkinan disebabkan oleh kualitas dari komponen transistor NPN yang digunakan sebagai driver. Selain itu, perbedaan pengukuran kemungkinan diakibatkan oleh penggunaan dioda yang dapat menurunkan tegangan sampai 0,7V pada rangkaian driver motor menggunakan transistor (Juditova, 2021). Hasil pengukuran dan perhitungan dapat juga dilihat pada Gambar 8. Seiring meningkatnya nilai duty cycle 25% sampai 100%, maka nilai tegangan yang dihasilkan akan meningkat. Pernyataan tersebut berlaku juga dengan arus dan daya.
12
10
8
6
4
2
0% 20% 40% 60% 80% 100%
Duty Cycle
0
0% 20% 40% 60% 80% 100%
Duty Cycle
Duty Cycle
Driver 4
0% 20% 40% 60% 80% 100%
Duty Cycle
Gambar 8. Grafik Hubungan Duty Cycle dengan Tegangan
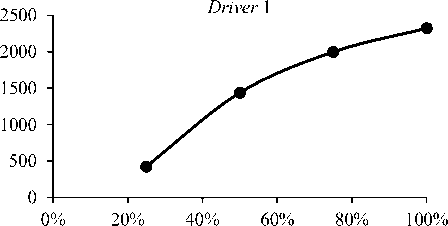
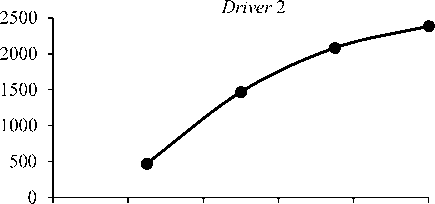
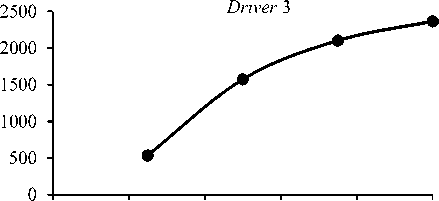
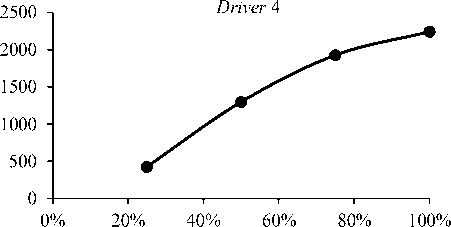
Hasil dari pengukuran RPM kipas DC menggunakan tachometer menunjukkan grafik hubungan antara duty cycle dengan kecepatan putaran kipas DC (RPM) dapat dilihat pada Gambar 9. Pada Grafik
menunjukan, seiring meningkatnya duty cycle maka kecepatan atau RPM dari kipas DC semakin meningkat, dengan rata – rata RPM maksimum yaitu 2329. Kipas DC tidak dapat berputar ketika duty cycle berada di bawah 23,5%.
Duty Cycle
0% 20% 40% 60% 80% 100%
Duty Cycle
0% 20% 40% 60% 80% 100%
Duty Cycle
Duty Cycle
Gambar 9. Grafik Hubungan Duty Cycle dengan RPM
Pengujian ini dapat disimpulkan bahwa fungsi dari rangkaian driver motor DC dalam mengontrol kecepatan kipas DC menggunakan kontrol PWM sudah bekerja baik sesuai dengan perancangan
perangkat keras. Berikut Tabel 3 merupakan hasil gabungan dari pengujian PWM, tegangan Arduino ke driver, tegangan driver ke kipas, dan RPM yang juga menjadi dasar kesimpulan dari pengujian ini.
Tabel 3. Hasil Pengujian Fungsi PWM, Driver, dan Kipas DC
|
Driver |
Duty Cycle |
Frekuensi |
Tegangan Arduino ke Base (Vrms) |
Tegangan Emitter ke Kipas DC |
RPM |
|
1 |
25% |
490,2 Hz |
2,48V |
2,23V |
425 |
|
(Pin D9) |
50% |
490,8 Hz |
3,52V |
4,93V |
1437 |
|
75% |
490,2 Hz |
4,24V |
7,73V |
1998 | |
|
100% |
- |
4,96V |
10,12V |
2324 | |
|
2 |
25% |
978,0 Hz |
2,48V |
2,15V |
472,7 |
|
(Pin D6) |
50% |
975,6 Hz |
3,44V |
5,35V |
1467 |
|
75% |
976,6 Hz |
4,40V |
8,38V |
2080 | |
|
100% |
- |
4,96V |
10,42V |
2383 | |
|
3 |
25% |
976,6 Hz |
2,24V |
2,13V |
536 |
|
(Pin D5) |
50% |
976,6 Hz |
3,52V |
5,3V |
1574 |
|
75% |
977,5 Hz |
4,40V |
8,33V |
2102 | |
|
100% |
- |
4,96V |
10,38V |
2366 | |
|
4 |
25% |
490,2 Hz |
2,48V |
2,03V |
427,1 |
|
(Pin D3) |
50% |
490,2 Hz |
3,52V |
4,89V |
1297 |
|
75% |
490,2 Hz |
4,32V |
7,75V |
1926 | |
|
100% |
- |
4,96V |
9,89V |
2241 |
Adanya perbedaan frekuensi pada pin Arduino UNO ATmega328P menyebabkan perbedaan RPM kipas DC pada duty cycle yang sama. Rata - rata frekuensi yang dihasilkan oleh pin PWM D9 dan D3 adalah 490,3 Hz dan pada pin PWM D6 dan D5 adalah 976,82 Hz. Semakin besar nilai frekuensi dan duty cycle, maka nilai RPM kipas DC yang dihasilkan akan semakin besar (Sonjaya Suhendar & Koswara, 2020).
-
d) Hubungan Kelembaban Udara dan Sistem Kendali Kipas DC
Hasil dari implementasi fungsi map() pada Arduino IDE pada rentang kelembaban udara 40% sampai 80% dengan rentang duty cycle 60 sampai 255 (23,5% - 100%) ditunjukan dengan sebuah persamaan linier y = 4,878x – 135,61 dengan R2 = 1 yang didapatkan dari sebuah grafik. Adapun hasil hubungan antara kelembaban udara dengan duty cycle dan RPM pada kipas DC dapat dilihat pada Tabel 4.
Tabel 4. Kelembaban Udara, Duty Cycle, dan Kecepatan Kipas DC
|
No. |
Kelembaban Udara |
Duty Cycle |
Kecepatan Kipas |
RPM |
|
1 |
<40% |
<23,5% (<60) |
Tidak Bergerak |
0 |
|
2 |
40% |
23,5% (60) |
Sangat Lambat |
<465,2 |
|
3 |
41% |
25% (64) |
Lambat |
465,2 |
|
4 |
54% |
50% (128) |
Sedang |
1444 |
|
5 |
67% |
75% (191) |
Cepat |
2027 |
|
6 |
80% |
100% (255) |
Sangat Cepat |
2329 |
|
7 |
>80% |
100% (255) |
Sangat Cepat |
2329 |
Uji Kinerja Prototipe
Prototipe sistem kelembaban udara greenhouse diuji secara keseluruhan untuk mengetahui apakah pompa misting dan irigasi dapat menyala dan mati ketika menyentuh nilai setting point. Parameter yang menjadi kinerja yaitu response time. Pengujian kinerja dilakukan untuk mendapatkan nilai response time sistem yang terdiri dari response time kerja on/off dan response time kerja sensor. Setiap pengujian dilakukan 3 kali pengulangan dengan pengambilan data setiap 2 detik melalui serial komunikasi Arduino IDE.
-
a) Pengujian Prototipe Sistem Kelembaban Udara Greenhouse
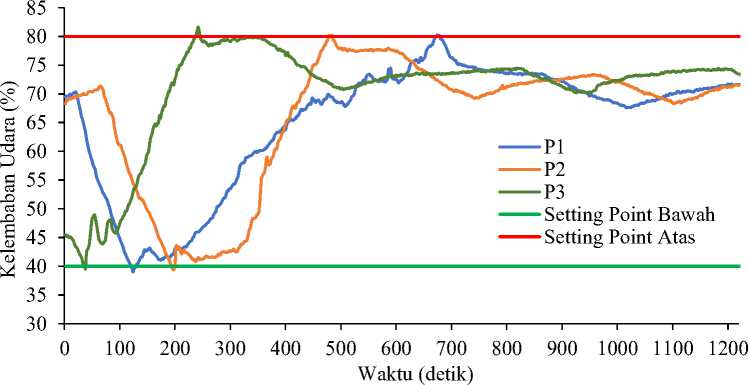
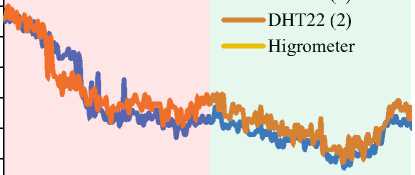
Dapat dilihat pada Gambar 10 merupakan grafik hasil pengujian prototipe ketika dijalankan. Pada grafik
menunjukan sistem kerja on/off pada sistem misting telah bekerja sesuai dengan perancangan. Ketika kelembaban udara dalam miniatur greenhouse menyentuh nilai setting point bawah, pompa misting menyala sehingga kelembaban udara naik sampai 80% hingga pompa misting tersebut mati.
Dari grafik pengujian tersebut ditunjukan juga bahwa kipas DC dapat menurunkan kelembaban udara sampai titik terendah pertama pada P1 (Pengulangan 1) 80,25% sampai 67,60% dengan selisih 12,65% selama 344 detik, P2 (Pengulangan 2) 80,10% sampai 69,40% dengan selisih 10,70% selama 270 detik, dan P3 (Pengulangan 3) 80,15% sampai 70,75% dengan selisih 9,4% selama 268 detik.
Gambar 10. Grafik Pengujian Prototipe Sistem Kontrol Kelembaban Udara Greenhouse
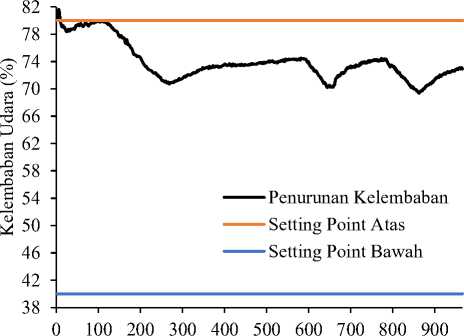
Setelah mengalami penurunan kelembaban udara sampai titik terendah pertama, RPM kipas DC semakin rendah, sehingga kemampuan untuk menurunkan kelembaban udara menurun. Akibatnya kelembaban udara kembali naik yang disebabkan oleh penguapan pada media tanam cocopeat dengan kondisi kapasitas lapang. Setelah kelembaban naik, RPM kipas akan berputar lebih cepat sehingga kelembaban kembali turun. Pola penurunan dan kenaikan tersebut akan terus terjadi, namun pada rentang nilai kelembaban optimal bagi pertumbuhan microgreen yaitu 40% sampai 80% yang dapat dilihat pada Gambar 11. Dapat disimpulkan sistem kendali
PWM dalam mengontrol kecepatan putaran kipas DC sebagai pemberi aliran udara dan menurunkan kelembaban udara pada greenhouse, mampu menurunkan kelembaban udara dari titik maksimum 80%, serta menjaga kelembaban udara tetap pada rentang yang optimal bagi pertumbuhan microgreen, dengan menurunkan dan menaikan nilai RPM dari kipas DC sesuai dengan nilai duty cycle nya.
Dapat dilihat pada Gambar 11 terjadi overshoot pada detik ke 6 dengan nilai error 1,6% diatas setting point atas kelembaban udara. Sistem kontrol PWM kipas DC mampu mengembalikan nilai error (overshoot) pada rentang yang optimal pada detik ke 10 selama
4,174 detik (response time). Dimana sistem memiliki response time yang baik dalam menanggapi error atau kelebihan kelembaban udara setelah pemberian misting. Batas maksimal response time testing yang dapat diterima yaitu 10 detik, semakin cepat waktu respon maka semakin baik dengan rentang 0,1 detik sampai 1 detik (Ferry, 2019).
fungsi. Steady state merupakan kondisi dimana nilai output dari sistem memasuki kondisi yang stabil sesuai dengan nilai input, dan kondisi sebelum steady disebut dengan transient state atau peralihan (Sari, 2013). Adapun grafik response time dapat dilihat pada Gambar 12, dimana daerah merah merupakan transient state dan daerah hijau merupakan steady state.
Waktu (detik)
61
S
54
53
DHT22
60
59
58
57
56
55

100
400
500
200 300
Waktu (s)
0
Gambar 11. Pola Penurunan Kelembaban Udara
-
b) Kinerja Response Time
Pompa misting dan irigasi otomatis telah bekerja dengan baik, dengan kinerja berupa response time atau waktu yang dibutuhkan sistem saat membaca data sensor kelembaban sampai memberikan output kendali berupa menyala (5V) dan mematikan (0V) pompa. Hasil pengujian response time dapat dilihat pada Tabel 5. Hasil response time rata - rata yang dibutuhkan sistem irigasi sebesar 78mS dan sistem misting 145mS dengan diberikan rentang waktu (delay) pembacaan sensor setiap 2 detik. Debit air rata – rata yang dihasilkan oleh pompa irigasi dan pompa pompa misting sebesar 42,67mL/detik dan 222,67mL/detik.
|
Tabel 5. Hasil Pengujian Kinerja Response Time | ||||
|
Kontrol On/Off |
Aktuator |
Ulangan |
Response Time (mS) |
Delay (Detik) |
|
Relay 1 |
Pompa |
P1 |
93 |
2 |
|
Misting |
P2 |
79 |
2 | |
|
P3 |
62 |
2 | ||
|
Rata-rata: |
78 |
2 | ||
|
Relay 2 |
Pompa |
P1 |
137 |
2 |
|
Irigasi |
P2 |
125 |
2 | |
|
P3 |
172 |
2 | ||
|
Rata-rata: |
145 |
2 | ||
Response time yang dibutuhkan oleh sistem dalam beradaptasi menyesuaikan atau menstabilkan pengukuran kelembaban udara untuk mencapai steady state dengan kelembaban udara yang terukur menggunakan Digital Thermo-Hygrometer model 303C, membutuhkan waktu sekitar 250 detik sampai 300 detik dengan nilai error sesuai dengan pengujian
KESIMPULAN
Berdasarkan penelitian yang telah dilakukan, berhasil dirancang dan dibangun sebuah prototipe sistem kontrol kelembaban udara greenhouse menggunakan PWM. Prototipe terapkan pada miniatur greenhouse bertipe lean-to berdimensi panjang 60 cm, lebar 40 cm, tinggi (1) 35 cm, tinggi (2) 63 cm, dan
kemiringan atap 35o, dengan aliran udara minimal sebesar 4,15 CFM. Prototipe dilengkapi sensor DHT22 dengan nilai error kelembaban udara DHT22(1) 3,09% dan DHT22(2) 3,34%, dengan kisaran kerja dari pada sensor kelembaban udara yaitu 0% RH - 100% RH, dengan kepekaan atau sensitivitas 0,1% RH. Kendali PWM kipas DC berhasil dibangun, semakin besar nilai tegangan yang diberikan oleh mikrokontroler Arduino UNO menuju driver motor DC, maka besar tegangan yang mengalir keluar dari driver (collector – emitter) menuju kipas DC semakin besar, sehingga mempengaruhi nilai RPM dari kipas DC. Sistem berhasil membaca dan menampilkan data, dan memberikan output dengan kinerja response time on/off sistem irigasi dan misting sebesar 78mS dan 145mS, dengan delay 2 detik.
DAFTAR PUSTAKA
Alahudin, M. (2013). Kondisi Termal Bangunan Greenhouse dan Screen House pada Fakultas Pertanian Universitas Musamus Merauke. Jurnal Ilmiah Mustek Anim Ha, 2(1), 16–27.
Anonim. (2017). Microgreens Production. Johnny’s
Selected Seeds, 1–3.
http://www.johnnyseeds.com/growers-library/micro-greens-production.html
Apriast, P., Sudana, I., & Sudarma, I. (2015).
Hubungan Sifat Fisika dan Kimia Tanah dengan Persentase Penyakit Layu pada Tanaman Cengkeh (Syzygium Aromaticum L.) yang Disebabkan oleh Jamur Akar Putih (Rigidoporus Sp.) di Desa Unggahan, Kabupaten Buleleng. E-Jurnal
Agroekoteknologi Tropika (Journal of Tropical Agroecotechnology), 4(1), 25–32.
Arifin, S., & Fathoni, A. (2014). Pemanfaatan Pulse Width Modulation Untuk Mengontrol Motor (Studi Kasus Robot Otomatis Dua Deviana). Jurnal Ilmiah Teknologi Informasi Asia, 8(2), 65–80.
As’adiya, L., & Murwani, I. (2021). Pengaruh Lama Penyinaran Lampu Led Merah, Biru, Kuning Terhadap Pertumbuhan Microgreen Kangkung (Ipomoea Reptant). Folium: Jurnal Ilmu Pertanian, 5(1), 14.
https://doi.org/10.33474/folium.v5i1.10358
Buffington, D E, Bucklin, R. A., Henley, R. W., & Mcconnell, D. B. (2019). Greenhouse
Ventilation. U.S. Department of Agriculture,
UF/IFAS Extension Service, University of
Florida, IFAS, 1–4.
https://edis.ifas.ufl.edu/ae030
Ferry. (2019). Response Time Testing. https://sis.binus.ac.id/2019/05/13/response-time-testing/. Diakses 20 Juli 2022.
Frey, N. (2020). Air Changes Per Hour: The What, Why, & How Answered.
https://www.vaniman.com/air-changes-per-hour-the-what-why-how-answered/. Diakses 22 Februari 2022.
Ginting, V. br, Perangin-angin, B., & Tamba, T. (2014). Sistem Pengendalian Asap Rokok Multikanal dengan Menggunakan Pwm Berbasis Mikrokontroler Atmega 8. FISIKA FMIPA USU, 6, 58–66.
Grooms, D. (2020). Microgreens: Market Analysis, Growing Methods and Models. MSc Thesis; California State University, Na, 1–24.
Hutabarat, T. M. R. (2018). Analisis Pengaruh Penambahan Jumlah Gain pada Rancangan Pengendali Adaptif Metode Mrac Diuji pada Sistem Orde Dua. Universitas Islam Negeri Sultan Syarif Kasim Riau.
Indriani, A., Witanto, Y., Supriadi, & Hendra. (2017). Sistem Kontrol Kekeruhan dan
Temperatur Air Laut Menggunakan Microcontroller Arduino Mega. Jurnal Teknik Mesin Mercu Buana, 6(3), 158–163.
Juditova. (2021). How to Drive a DC Motor with a BJT Transistor.
https://www.techzorro.com/en/blog/how-to-drive-a-dc-motor-with-a-bjt-transistor/. Diakses 7 Juli 2022.
Karsid, K., Ramadhan, A. W., & Aziz, R. (2018). Perbandingan Kinerja Mesin Penetas Telur Otomatis dengan Menggunakan Kontrol On-Off dan Kontrol PWM. Matrix: Jurnal Manajemen Teknologi Dan Informatika, 8(1), 1–5. https://doi.org/10.31940/matrix.v8i1.733
Megido, A., & Ariyanto, E. (2016). Sistem Kontrol Suhu Air Menggunakan Pengendali PID dan Volume Air pada Tangki Pemanas Air Berbasis Arduino Uno. Gema Teknologi, 18(4), 21.
https://doi.org/10.14710/gt.v18i4.21912
Nolan, D. A. (2018). Effects of Seed Density and Other Factors on the Yield of Microgreens Grown Hydroponically on Burlap.
Nurnasari, E., & Djumali. (2016). Pengaruh Kondisi Ketinggian Tempat Terhadap Produksi dan Mutu Tembakau Temanggung. Buletin
Tanaman Tembakau, Serat & Minyak Industri, 2(2), 45.
https://doi.org/10.21082/bultas.v2n2.2010.45-59
Renna, M., Di Gioia, F., Leoni, B., Mininni, C., & Santamaria, P. (2017). Culinary Assessment of Self-Produced Microgreens as Basic Ingredients in Sweet and Savory Dishes. Journal of Culinary Science and Technology, 15(2), 126–142.
https://doi.org/10.1080/15428052.2016.122553 4
Ripai, A., & Wibowo, A. (2016). Obstacle Avoider Prototype Robot Using After Market Component. Swabumi, IV(2), 129–140.
Sari, F. Y. (2013). Analisa Steady State Error Sistem Kontrol Linier Invariant Waktu. Jurnal Matematika UNAND, 2(3), 91.
https://doi.org/10.25077/jmu.2.3.91-97.2013
Sonjaya Suhendar, W., & Koswara, E. (2020). Analisis Pengaruh Duty Cycle dan Frekuensi terhadap Kecepatan Motor Listrik. Computer Vision: Principles, Algorithms, Applications, Learning: Fifth Edition, 103, 1–858.
Yudaningtyas, E. (2017). Belajar Sistem Kontrol: Soal dan Pembahasan. UB Express.
180
Discussion and feedback