Perancangan Sistem Kontrol pH dan Turbidity Akuarium
on
JURNAL BETA (BIOSISTEM DAN TEKNIK PERTANIAN) Program Studi Teknik Pertanian, Fakultas Teknologi Pertanian Universitas Udayana http://ojs.unud.ac.id/index.php/beta
Volume 11, Nomor 1, bulan April, 2023
Perancangan Sistem Kontrol pH dan Turbidity Akuarium
Aquarium pH and Turbidity Control System Design
Ni Kadek Sintya Resmiani, Ni Nyoman Sulastri*, I Made Anom Sutrisna Wijaya, I Putu Gede Budisanjaya
Program Studi Teknik Pertanian dan Biosistem, Fakultas Teknologi Pertanian Universitas Udayana, Badung, Bali, Indonesia
*email: sulastri@unud.ac.id
Abstrak
Sistem kontrol banyak diterapkan dalam berbagai bidang, salah satunya dalam budidaya ikan. Kualitas air dapat menurun dengan cepat karena terjadinya pengendapan sisa pakan, feses, dan buangan metabolisme pada ikan yang menyebabkan konsentrasi fosfat meningkat sehingga air menjadi keruh. Selain itu, perubahan pH yang besar dalam waktu singkat menimbulkan gangguan fisiologis bagi ikan. Kualitas air akuarium memegang peranan yang penting dalam pemeliharaan, sehingga diperlukan sistem yang dapat mengontrol dan memantau kualitas air pada budidaya ikan. Penelitian ini bertujuan untuk merancang dan membangun sistem kontrol pH dan turbidity akuarium serta mendapatkan kinerja hasil rancangan. Perancangan sistem yang dihasilkan pada penelitian ini meliputi penggunaan Arduino Uno ATmega328P sebagai mikrokontroler yang terhubung dengan sensor pH E-201 BNC sebagai pengukur pH, sensor turbidity SEN0189 sebagai pengukur kekeruhan, sensor ultrasonik sebagai pengukur ketinggian air, relay sebagai pengendali pompa dan solenoid valve, serta LCD 16x2 sebagai pemantau. Sistem menggunakan setting point pH dan turbidity untuk ikan koi yang dimasukan secara manual melalui coding. Sistem yang dibangun menghasilkan prototipe akuarium dengan dimensi 40cmx25cmx28cm yang dilengkapi oleh sensor pH E-201 BNC dengan error pada larutan asam, basa, dan netral sebesar 0,35%, 0,72%, dan 0,49% serta akurasi sebesar 99,65%, 99,28%, dan 99,51%, sensor turbidity yang sudah dikalibrasi dengan TDS meter, serta sensor ultrasonik HC-SR04 dengan error sebesar 0,53% dan akurasi sebesar 99,47%. Sistem berhasil membaca, menampilkan data, dan memberikan output dengan response time pada sistem pengurasan dan pengisian sebesar 6,3s dan 0,14s. Sistem dapat bekerja dengan baik dimana sistem dapat memantau dan mengontrol pH dan turbidity dalam akuarium.
Kata kunci: akuarium, arduino, pH, sistem kontrol, turbidity.
Abtract
Control systems are widely applied in various fields, including fish farming. Water quality can decrease rapidly due to the deposition of feed residues, faeces, and metabolic waste of fish. The deposition causes the phosphate concentration to elevate; as a result, the water becomes murky. In addition, significant changes in pH in a short time cause physiological disturbances for fish. Aquarium water quality plays a vital role in the maintenance of aquarium fish; therefore, a system that can control and monitor water quality in fish farming is needed. The purpose of the study was to design as well as build an aquarium pH and turbidity control system and to assess the performance of the design produced. The system was designed using Arduino Uno ATmega328P as a microcontroller. This microcontroller was connected to sensor pH E-201 BNC, sensor turbidity SEN0189, ultrasonic sensor as a water level sensor, a relay as a pump controller, solenoid valve and 16x2 LCD as a monitor. The pH and turbidity setting point was based on the optimum living condition of Koi fish, which was entered manually through coding. For this study, an aquarium prototype was built with 40 x 25 x 28 cm dimensions. The results showed that the pH sensor error values for acid, alkaline and neutral water conditions were 0,35%, 0,72%, dan 0,49%, respectively, while the accuracies were 99.65 %, 99.28%, and 99.51%, respectively. A turbidity meter was calibrated with a TDS meter. The error and the accuracy values for the ultrasonic sensor were 0,53% and 99,47%, respectively. The system was able to read and display data as well as provide output with a response time for the water draining and filling system of 6,3s and 0,14s. The system built performed well in monitoring and controlling pH and turbidity in an aquarium.
Keyword: aquarium, arduino, control system, pH, turbidity.
PENDAHULUAN Sistem kontrol adalah suatu sistem yang memiliki
hubungan satu sama lain antar komponen yang akan Penerapan IPTEK memberikan banyak keuntungan membentuk suatu konfigurasi sistem dan akan bagi manusia salah satunya adalah sistem kontrol.
memberikan respons atau keluaran sistem yang diharapkan (Yudaningtyas, 2017). Sistem kontrol memegang peranan penting dalam aspek kehidupan manusia dan menjadi bagian yang tidak terpisahkan dalam kehidupan sehari-hari (Indriani et al., 2017). Saat ini sistem kontrol banyak digunakan untuk membantu aktivitas manusia dalam berbagai bidang salah satunya di bidang perikanan. Nilai produksi perikanan budidaya terus meningkat, salah satunya adalah budidaya ikan hias.
Kualitas air merupakan suatu ukuran kondisi air yang dilihat dari karakter kimiawi, fisik, dan biologisnya (Pramana, 2018). Kualitas air pada budidaya ikan berperan penting dalam menciptakan suasana lingkungan yang sesuai dengan kebutuhan ikan tersebut serta mampu meningkatkan pertumbuhan dan perkembangan ikan hias (Bareta et al., 2021). Kualitas air budidaya dapat menurun dengan cepat karena terjadinya pengendapan sisa pakan, feses, dan buangan metabolisme pada ikan di dasar kolam yang menyebabkan konsentrasi fosfat meningkat sehingga air menjadi keruh (Ebeling et al., 2006; Wadu et al., 2017). Perairan yang keruh dapat mengurangi cahaya yang masuk dan menghambat fotosintesis pada fitoplankton, jika hal ini terjadi akan menurunkan kualitas air dan produktivitas perairan akan menurun (Rahman, 2008; Toni & Widiasari, 2021). Perubahan pH air yang besar dalam waktu singkat dapat menimbulkan gangguan fisiologis bagi biota air. Perubahan pH dipengaruhi oleh proses respirasi (Deriyanti, 2016). Oleh karena itu, pemantauan kondisi air menjadi salah satu hal penting dalam pemeliharaan ikan.
Pemantauan kejernihan air akuarium di tempat budidaya ikan hias dilakukan secara manual. Selain kejernihan akuarium, terdapat faktor lain seperti pengecekan pH yang dilakukan sekali setelah mengisi akuarium. Penggantian air dilakukan hanya berdasarkan pengamatan secara langsung selama beberapa minggu. Hal ini tentunya akan berpengaruh terhadap efisiensi waktu dan kerja dari para pembudidaya ikan hias. Pemantauan secara berkala perlu dilakukan untuk tetap menjaga ikan hias terawat dengan baik. Dari uraian beberapa permasalahan diatas, maka diperlukan suatu sistem yang dapat memonitoring dan mengontrol kualitas air dan kebutuhan lainnya pada budidaya ikan.
Saat ini bidang perikanan telah berkembang pesat yang ditandai dengan adanya penerapan teknologi ke dalam berbagai aspek yang mampu mendukung peningkatan dalam bidang perikanan. Sistem kontrol menjadi salah satu bagian yang banyak ditemukan bidang pertanian dan perikanan seperti penggunaan mikrokontroler, sensor, dan aktuator (Indriani et al.,
2017). Penelitian yang dilakukan oleh Novitasari (2017) tentang sistem penggantian air dan pemberian pakan secara otomatis pada akuarium ikan hias berbasis mikrokontroler menghasilkan prototipe dengan error pada sistem pengisian dan pengurasan air sebesar ±0,16 cm. Teknologi dalam prototipe tersebut dikembangkan lagi dengan peningkatan antara lain: penambahan sensor pH dan turbidity yang lebih akurat untuk mendeteksi pH dan kekeruhan air dengan sensitivitas sensor yang lebih baik, serta penggunaan pompa air dalam sistem pengurasan. Selanjutnya penelitian yang dilakukan oleh Pratama (2018) menyimpulkan bahwa, penggunaan otomatisasi berbasis arduino mampu memonitoring kualitas air di akuarium dengan baik. Oleh karena itu, dalam penelitian ini merancang sistem kontrol pH dan turbidity akuarium dengan tujuan untuk merancang dan membangun sistem kontrol serta menguji kinerja alat yang dibangun. Penelitian ini berfokus pada perancangan dan pembangunan sistem kontrol pH dan turbidity yang dipasang pada prototipe akuarium. Sistem kerja prototipe yang dirancang mempertimbangkan dua parameter kualitas air yaitu pH dan kekeruhan air dengan menggunakan setting point dari budidaya ikan koi.
METODE
Tempat dan Waktu Penelitian
Penelitian ini dilaksanakan di Laboratorium Pengelolaan Sumber Daya Alam dan Laboratorium Sistem dan Manajemen Keteknikan Pertanian, Fakultas Teknologi Pertanian, Universitas Udayana, Kampus Sudirman. Pelaksanaan penelitian ini dilakukan pada bulan Maret 2022 sampai dengan bulan Mei 2022.
Bahan dan Alat
Bahan yang digunakan dalam penelitian ini adalah Arduino Uno ATmega328P, sensor pH E-201 BNC, sensor turbidity SEN0189, sensor ultrasonik HC-SR04, relay 2 channel, pompa air, solenoid valve, LCD 16x2, breadboard, power supply 12V 1A, pipa, kabel, serta beberapa komponen pendukung lainnya. Alat yang dibutuhkan yaitu pH meter, TDS meter, multimeter, laptop, kabel USB, penggaris, solder, perangkat lunak Arduino IDE, SketchUp, Fritzing, serta alat pendukung lainnya.
Tahapan Perancangan
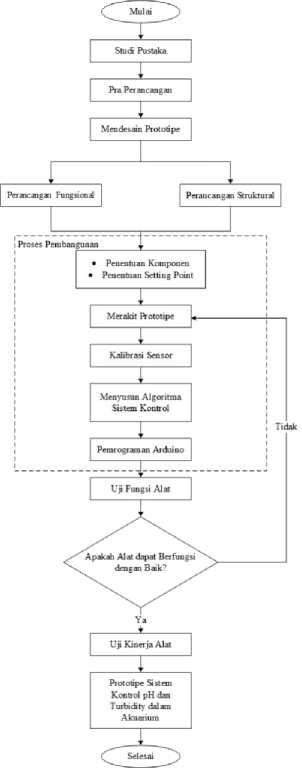
Tahapan dalam perancangan sistem kontrol pH dan turbidity akuarium dilakukan dengan beberapa tahapan yang disajikan pada diagram alir penelitian (Gambar 1). Tahap awal penelitian dilakukan studi pustaka sebagai dasar pengkajian dan pemahaman mengenai sistem kontrol pH dan turbidity akuarium. Kemudian dilanjutkan dengan pra penelitian,
mendesain prototipe (perancangan struktural dan fungsional), penentuan komponen, penentuan setting point, kalibrasi sensor, pemrograman sistem, uji fungsi, dan uji kinerja keseluruhan sistem.
Gambar 1. Diagram Alir Penelitian
Rancangan Sistem Kontrol pH dan Turbidity
Rancangan prototipe sistem kontrol pH dan turbidity yang dibangun terdiri dari unit kontrol, unit sensor, unit output, dan akuarium yang dapat dilihat pada Gambar 2. Unit kontrol terdiri dari Arduino Uno ATmega328P sebagai mikrokontroler yang akan mengatur kerja dari sensor dan aktuator. Unit sensor terdiri dari sensor pH E-201 BNC, sensor turbidity SEN0189, dan sensor ultrasonik HC-SR04. Unit output terdiri dari pompa air, solenoid valve, dan relay. Agar mikrokontroler dapat mengatur kinerja dari sistem, maka diperlukan perangkat lunak (coding pemrograman). Unit kontrol diprogram menggunakan perangkat lunak Arduino IDE, sehingga dapat bekerja menjalankan pengontrolan pH dan turbidity.
Rancangan Perangkat Keras
Rancangan perangkat keras pada penelitian ini menggunakan Arduino Uno ATmega 328P sebagai mikrokontroler yang terhubung dengan sensor pH E-
201 BNC sebagai pengukur pH, sensor turbidity SEN0189 sebagai pengukur nilai kekeruhan air, sensor ultrasonik sebagai pengukur ketinggian air, relay sebagai pengendali aktuator, pompa air sebagai penguras air, solenoid valve sebagai pengisi air, power supply 12V sebagai sumber listrik untuk menyalakan arduino, serta LCD 16x2 sebagai penampil data. Sebelum digunakan sensor dikalibrasi dengan metode regresi linear. Prototipe akuarium dibangun dengan dimensi 40 cm x 25 cm x 28 cm yang terbuat dari kaca berfungsi untuk menopang seluruh komponen. Adapun rangkaian breadboard perangkat keras dapat dilihat pada Gambar 3.
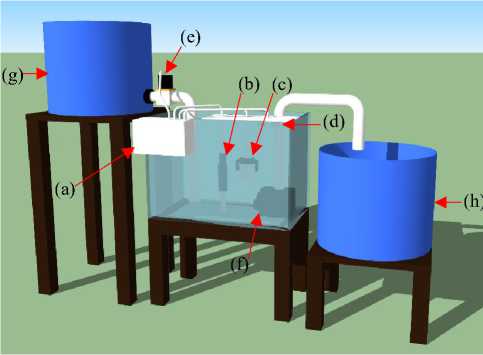
Gambar 2. Desain Rancangan Sistem Kontrol pH dan Turbidity Akuarium
Keterangan: (a): unit kontrol, (b): sensor pH, (c): sensor turbidity, (d): sensor ultrasonik, (e): solenoid valve, (f): pompa air, (g): wadah pengisian air, (h): wadah pengurasan air
Sensor Ultrasonik
Relay
Pompa Air
Power
Sensor pH
duino Uno
Solenoid Valve
Sensor Turbidity
LCD 16x2
Gambar 3. Rangkaian Breadboard Perangkat Keras
Rancangan Perangkat Lunak Sistem
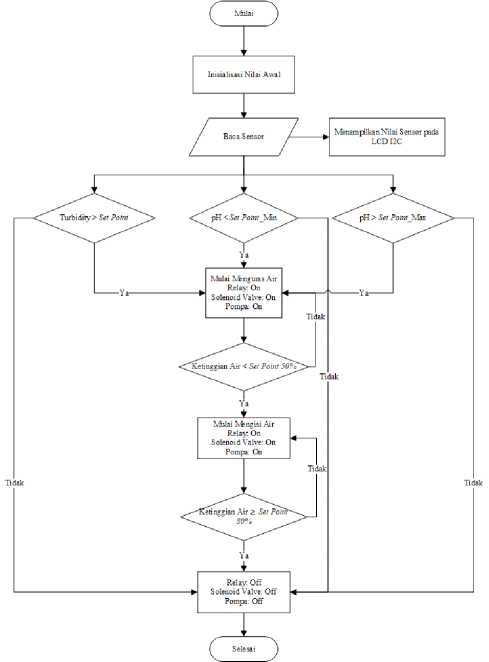
Rancangan perangkat lunak sistem kontrol pH dan turbidity akuarium dapat dilihat pada diagram alir program (Gambar 4). Seluruh data yang diterima pada sensor akan diproses pada unit kontrol. Proses perancangan sistem pembacaan data sensor, menampilkan data pada LCD, dan memproses data menjadi output sistem diprogram menggunakan Arduino IDE yang di-compile pada mikrokontroler Arduino Uno. Dalam memproses data menjadi output
sistem yaitu menyalakan dan mematikan aktuator (pompa air dan solenoid valve) dibutuhkan nilai setting point. Pada penelitian ini setting point yang digunakan adalah setting point pada budidaya ikan koi, yaitu setting point untuk parameter kualitas air pH dan turbidity. Nilai pH yang optimal bagi pertumbuhan dan perkembangan ikan koi yaitu sekitar 6,5-8 (Direktorat Pengolahan dan Bina Mutu, 2019; Papilon & Efendi, 2017). Sementara nilai turbidity/kekeruhan air ikan hias maksimum adalah 400 NTU (Direktorat Jenderal Perikanan Budidaya Direktorat Perbenihan, 2006; Payara et al., 2014; Putrawan et al., 2020). Dalam penelitian ini setting point kekeruhan yang digunakan adalah maksimum 300 NTU. Nilai setting point tersebut dimasukan secara manual melalui coding.
Gambar 4. Diagram Alir Perangkat Lunak
Pengujian Sistem Kontrol pH dan Turbidity
Pengujian alat dan sistem yang dilakukan pada penelitian ini adalah uji fungsi dan uji kinerja alat. Uji fungsi alat dilakukan untuk mengetahui persentase kekurangan (error) pada alat yang dirancang dan semua fungsi dari komponen yang dirancang dapat berfungsi sesuai dengan rancangan fungsional dan strukturalnya. Perhitungan error sensor dilakukan dengan menggunakan persamaan:
Nilai Sensor-Nilai Alat Ukur
Error Sensor = | | × 100% [1]
Nilai Alat Ukur
Adapun pengujian alat diantaranya adalah pengujian fungsi sensor pH, sensor turbidity, dan sensor ultrasonik. Pengujian sensor dilakukan dengan membandingkan data yang terbaca oleh sensor dengan alat ukur. Untuk mengetahui tingkat akurasi sensor digunakan perhitungan pada persamaan berikut:
Persentase Akurasi = |100 -Error| × 100% [2]
Setelah pengujian fungsi alat selesai dan alat dapat berfungsi dengan baik maka dilakukan uji kinerja alat untuk mengetahui kinerja alat dalam bekerja dan memberikan merespons. Seluruh sistem akan dilakukan uji kinerja alat dengan menggunakan metode Response Time Testing untuk mengetahui berapa lama waktu yang diperlukan sistem untuk menanggapi respons yang ada.
HASIL DAN PEMBAHASAN
Prototipe Sistem Kontrol pH dan Turbidity Akuarium
Hasil dari rancangan sistem adalah prototipe sistem kontrol pH dan turbidity akuarium seperti pada Gambar 5 yang terdiri dari unit kontrol, unit sensor, unit output dan akuarium. Unit kontrol terdiri dari Arduino Uno ATmega328P sebagai mikrokontroler. Sensor yang digunakan adalah sensor pH E-201 BNC, sensor turbidity SEN0189, dan sensor ultrasonik HC-SR04. Unit output terdiri dari relay, solenoid valve, dan pompa air. Akuarium dibuat menggunakan bahan kaca dengan dimensi 40 cm x 25 cm x 28 cm dengan kapasitas air mencapai 28 liter. Akuarium sebagai tempat untuk meletakan seluruh komponen mulai dari unit kontrol, sensor, dan aktuator serta memberikan batasan ruang kerja untuk sistem dan alat yang dijalankan.
Hasil Rancangan Perangkat Keras
Unit kontrol terdiri dari Arduino Uno ATmega328P sebagai mikrokontroler yang berfungsi untuk membaca data yang diterima oleh 3 buah sensor yaitu sensor pH E-201 BNC melalui pin analog A0, membaca data sensor turbidity SEN0189 melalui pin analog A1, membaca data sensor ultrasonik HC-SR04 melalui pin digital D2 dan D3, mengontrol nyala LCD 16x2 melalui komunikasi I2C protocol dengan pin analog A4 dan A5, mengontrol on/off relay melalui pin digital D5 dan D6. Arduino Uno juga memberikan tegangan sebagai power supply untuk sensor pH, sensor turbidity, LCD, dan relay melalui pin 5V. Arduino Uno ATmega328P dalam rangkaian terhubung ke seluruh ground melalui pin GND serta diberikan adaptor dengan tegangan sebesar 12V 1A. Pada rangkaian menggunakan
breadboard sebagai penghubung tegangan dan mikrokontroler. Unit kontrol dapat dilihat pada ground pada setiap komponen dengan Gambar 6.
(g)
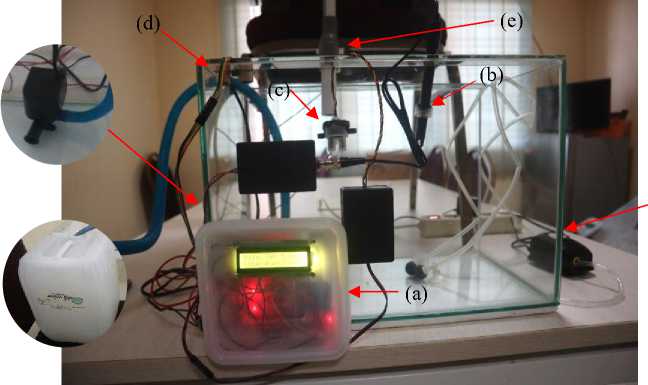
Gambar 5. Prototipe Sistem Kontrol pH dan Turbidity Akuarium
Keterangan: (a): unit kontrol, (b): sensor pH, (c): sensor turbidity, (d): sensor ultrasonik, (e): solenoid valve, (f): pompa air, (g): aerator, (h): wadah pengurasan air
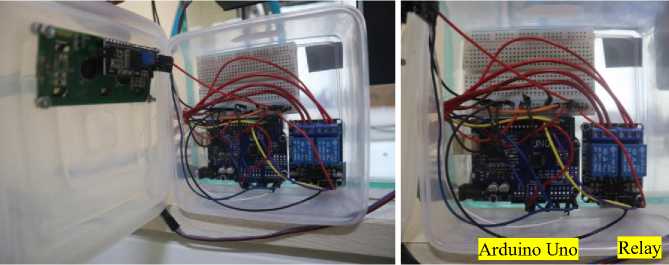
Gambar 6. Perangkat Keras Unit Kontrol
Hasil Rancangan Perangkat Lunak Sistem
Perangkat lunak sistem diprogram dengan perangkat lunak Arduino IDE yang berfungsi untuk memprogram sistem untuk membaca data sensor dan mengendalikan relay. Adapun kode pemrograman dinyatakan sebagai berikut:
//reading sensor pH for(int i=0;i<10;i++) {buf[i]=analogRead(pHsensor); delay(10); }
for(int i=0;i<9;i++)
{for(int j=i+1;j<10;j++)
{if(buf[i]>buf[j])
{temp=buf[i];
buf[i]=buf[j];
buf[j]=temp;}}}
avgValue=0;
for(int i=2;i<8;i++) avgValue+=buf[i];
float pHVol=(float)avgValue*5.0/1023/6;
float Nilai_pH = -5.796 * pHVol + 21.577;
Serial.print("pH = ");
Serial.println(Nilai_pH);
delay(1000);
//reading sensor turbidity
int nilai = analogRead(Turbiditysensor);
float Nilai_Turbidity = -0.17 * nilai + 543.75;
Serial.print("Turbidity = ");
Serial.println(Nilai_Turbidity); delay(1000);
//reading sensor ultrasonik digitalWrite (trig, LOW); delayMicroseconds(2); digitalWrite(trig, HIGH); delayMicroseconds(10); digitalWrite(trig, LOW);
durasi = pulseIn(echo, HIGH); jarak_sensor = durasi*0.034/2; ketinggian_air = 26 - jarak_sensor;
if (ketinggian_air >= ketinggian_80) { digitalWrite(solenoid_isi, HIGH);
digitalWrite(pompa_kuras, HIGH); } if (modeKuras ==1){ digitalWrite(pompa_kuras, LOW); Serial.println("----------------");
Serial.println("Menguras Air, Pompa Nyala"); Serial.print("Tinggi Air =");
Serial.print(ketinggian_air); Serial.println("cm");
else if (modeKuras ==0){ digitalWrite(pompa_kuras, HIGH); digitalWrite(solenoid_isi, LOW); Serial.println("----------------");
Serial.println("Mengisi Air, Solenoid Valve Nyala"); Serial.print("Tinggi Air =");
Pengujian Fungsi Sensor pH E-201 BNC
Pengujian sensor pH E-201 BNC dilakukan dengan membandingkan hasil pengukuran yang didapatkan oleh sensor yang sebelumnya sudah dikalibrasi dengan menggunakan regresi linear pada Microsoft Excel dengan larutan standar dan diperoleh persamaan Y = -5,796X + 21,577. Kalibrasi dilakukan agar mendapatkan hasil pengukuran yang lebih sesuai dengan alat ukur sebenarnya. Hasil regresi linear dimasukan kedalam coding arduino kemudian dilakukan pengujian error sensor dengan cara membandingkan hasil pengukuran alat ukur dengan sensor. Pada tahapan ini, sensor pH
dibandingkan dengan pH meter di dalam larutan standar yang dicampurkan dengan aquades sebanyak 250 mL pada gelas ukur. Larutan standar pH yang digunakan adalah pH 4,01; 6,86; 9,18 pada suhu 25°C. Pengujian dilakukan pada suhu ruangan 25°C. Data pengukuran pH diambil setiap 3 detik sekali selama 10 menit, sehingga diperoleh 20 data dalam 1 menit. Setiap data dalam masing-masing larutan standar pH dibuat rata - rata, sehingga hasil error menjadi 10 data dalam setiap larutan standar. Adapun hasil pengujian sensor pH E-201 BNC disajikan pada Error! Reference source not found..
Tabel 1. Hasil Pengukuran Sensor Ph E-201 BNC
|
Menit ke- |
Alat Ukur pH Meter |
Hasil Pengukuran Sensor pH |
Error (%) |
Akurasi Sensor (%) | ||||||||
|
A |
N |
B |
A |
N |
B |
A |
N |
B |
A |
N |
B | |
|
1 |
4,04 |
6,85 |
9,12 |
4,07 |
6,81 |
9,00 |
0,73 |
0,65 |
1,35 |
99,27 |
99,35 |
98,65 |
|
2 |
4,05 |
6,86 |
9,15 |
4,07 |
6,81 |
9,02 |
0,44 |
0,75 |
1,38 |
99,56 |
99,25 |
98,62 |
|
3 |
4,03 |
6,87 |
9,13 |
4,06 |
6,81 |
9,03 |
0,71 |
0,83 |
1,08 |
99,29 |
99,17 |
98,92 |
|
4 |
4,03 |
6,84 |
9,09 |
4,05 |
6,82 |
9,04 |
0,46 |
0,36 |
0,54 |
99,54 |
99,64 |
99,46 |
|
5 |
4,05 |
6,83 |
9,07 |
4,04 |
6,82 |
9,05 |
0,19 |
0,16 |
0,24 |
99,81 |
99,84 |
99,76 |
|
6 |
4,04 |
6,85 |
9,13 |
4,04 |
6,82 |
9,06 |
0,02 |
0,47 |
0,79 |
99,98 |
99,53 |
99,21 |
|
7 |
4,05 |
6,86 |
9,08 |
4,04 |
6,82 |
9,06 |
0,35 |
0,60 |
0,24 |
99,65 |
99,40 |
99,76 |
|
8 |
4,02 |
6,86 |
9,10 |
4,03 |
6,82 |
9,06 |
0,25 |
0,58 |
0,40 |
99,75 |
99,42 |
99,60 |
|
9 |
4,02 |
6,84 |
9,05 |
4,03 |
6,82 |
9,10 |
0,19 |
0,28 |
0,56 |
99,81 |
99,72 |
99,44 |
|
10 |
4,02 |
6,84 |
9,07 |
4,03 |
6,82 |
9,02 |
0,20 |
0,26 |
0,57 |
99,80 |
99,74 |
99,43 |
|
Rata-Rata |
0,35 |
0,49 |
0,72 |
99,65 |
99,51 |
99,28 | ||||||
Dari hasil data pengukuran pH, diperoleh error sensor pada larutan asam sebesar 0,35%, error sensor pada larutan netral sebesar 0,49%, dan error sensor pada larutan basa sebesar 0,72%. Berdasarkan hasil error yang telah didapatkan, sensor dapat dikatakan bekerja dengan baik sesuai dengan datasheet sensor pH E-201 BNC yang menyatakan sensor bekerja dengan baik apabila memiliki nilai error < 15% (Caballero, 2017). Berdasarkan hasil pengujian sensor didapatkan rata-rata akurasi sensor pada larutan asam sebesar 99,65%, rata-rata akurasi sensor pada larutan netral sebesar 99,51%, dan rata-rata akurasi sensor pada larutan basa sebesar 99,28%. Sesuai dengan datasheet dari sensor pH E-201 BNC, maka sensor dapat dikatakan memenuhi persyaratan untuk digunakan sesuai dengan akurasi minimal sensor yaitu 98,5% (Saputra, 2020).
Pengujian Fungsi Sensor Turbidity SEN0189
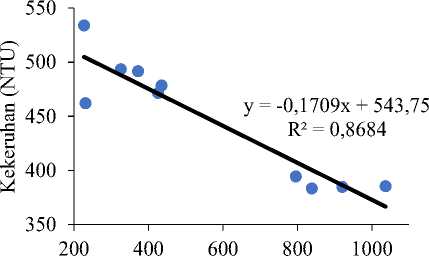
Pengujian sensor turbidity dilakukan dengan menemukan hubungan dari nilai NTU pada kekeruhan dengan nilai ppm pada TDS menggunakan analisis regresi linear sehingga diperoleh sebuah persamaan linear yang dimasukan kedalam coding. Pengukuran dilakukan dilakukan dengan selang waktu pengambilan data 6 detik selama 10 menit, sehingga dalam 1 menit didapatkan 10 data
pengukuran. Setiap 10 data dalam 1 menit dibuat rata - rata, sehingga hasil pengukuran menjadi 10 data dalam 10 menit seperti pada Error! Reference source not found.. Pengukuran dilakukan pada air keran yang dilarutkan dengan pakan ikan sedikit demi sedikit agar mendapatkan hasil pengukuran yang berbeda-beda. Pengukuran dilakukan di dalam ruangan dengan suhu 25°C.
|
Tabel 2. Hasil Pengukuran TDS dan Turbidity | ||
|
No |
Alat Ukur TDS Meter (ppm) |
Sensor Turbidity (NTU) |
|
1 |
326 |
494 |
|
2 |
231 |
462 |
|
3 |
426 |
472 |
|
4 |
372 |
492 |
|
5 |
227 |
534 |
|
6 |
435 |
479 |
|
7 |
921 |
385 |
|
8 |
796 |
394 |
|
9 |
1037 |
385 |
|
10 |
839 |
383 |
Dari hasil pengukuran pada tabel selanjutnya dilakukan regresi linear untuk mendapatkan hubungan nilai X dan Y. Pada Gambar 7 nilai TDS meter dengan satuan ppm berada di sumbu X dan nilai
kekeruhan yang dibaca oleh sensor dalam satuan NTU berada di sumbu Y. Hasil regresi linear menghasilkan persamaan Y = -0,1709x + 543,75 dengan nilai R square sebesar 0,8684. Hasil tersebut kemudian dimasukan kedalam coding arduino.
TDS (ppm)
Gambar 7. Grafik Hubungan TDS (ppm) dengan Kekeruhan (NTU)
Pengujian Fungsi Sensor Ultrasonik HC-SR04
Pengujian sensor ultrasonik HC-SR04 bertujuan untuk menghitung akurasi sensor saat mendeteksi ketinggian air pada prototipe akuarium dan untuk mengetahui berapa persen error sensor ultrasonik diterapkan pada sistem. Pengujian sensor dilakukan dengan membandingkan hasil pengukuran yang didapat oleh sensor ultrasonik HC-SR04 dengan alat ukur penggaris/mistar. Pada tahap ini, pengujian dilakukan dengan cara membandingkan tinggi sebenarnya dengan pembacaan tinggi pada sensor. Pengujian dilakukan sebanyak 10 kali yang disajikan pada Error! Reference source not found..
Tabel 3. Hasil Pengujian Sensor Ultrasonik HC-SR04
|
No |
Penggaris (cm) |
Sensor Ultrasonik (cm) |
Selisih (cm) |
Error (%) |
Akurasi Sensor (%) |
|
1 |
5 |
5,03 |
0,03 |
0,60 |
99,40 |
|
2 |
7 |
6,87 |
-0,13 |
1,86 |
98,14 |
|
3 |
10 |
9,95 |
-0,05 |
0,50 |
99,50 |
|
4 |
12 |
11,99 |
-0,01 |
0,08 |
99,92 |
|
5 |
15 |
15,06 |
0,06 |
0,40 |
99,60 |
|
6 |
18 |
17,95 |
-0,05 |
0,28 |
99,72 |
|
7 |
20 |
20,03 |
0,03 |
0,15 |
99,85 |
|
8 |
24 |
23,87 |
-0,13 |
0,54 |
99,46 |
|
9 |
27 |
26,84 |
-0,16 |
0,59 |
99,41 |
|
10 |
30 |
29,92 |
-0,08 |
0,27 |
99,73 |
|
Rata Rata |
0,53 |
99,47 | |||
Dari hasil pengujian yang telah dilakukan, didapatkan rata-rata error sensor yang dihasilkan adalah 0,53% dan akurasi sensor sebesar 99,47%. Berdasarkan hasil
error dan akurasi sensor, sensor dapat dikatakan bekerja dengan baik sesuai dengan datasheet sensor ultrasonik HC-SR04 yang menyatakan sensor bekerja dengan baik apabila memiliki akurasi sebesar 3 mm (Marian, 2022).
Pengujian Fungsi Perangkat Lunak Sistem
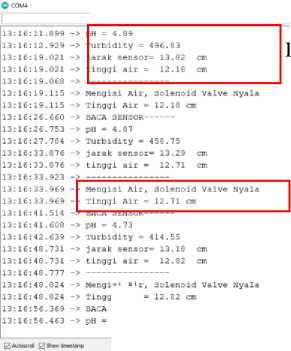
Pengujian perangkat lunak sistem dilakukan dengan pengujian pembacaan data. Pengujian pembacaan data dilakukan untuk mengetahui apakah pemrograman dari perangkat lunak telah bekerja dengan baik. Pengujian pembacaan data dilakukan dengan melihat pada Serial Monitor dari software Arduino IDE. Pembacaan data oleh sensor akan diproses oleh mikrokontroler dengan kode pemrograman yang kemudian diproses dan dikirimkan menuju LCD 16x2. Data sensor dapat dipantau melalui serial monitor seperti yang ditampilkan pada Gambar 8.
Mengisi Air
Pembacaan Sensor
Status Kondisi Air
SENSOR-
Gambar 8. Pengujian Pembacaan Data pada Serial Monitor
Pengujian Fungsi Sistem Kendali
Pengujian sistem kendali dilakukan dengan membaca kondisi kualitas air yang berbeda dalam akuarium untuk masing-masing kualitas air yaitu nilai pH dan turbidity. Pengujian ini dilakukan untuk mengetahui apakah coding yang sudah diterapkan berhasil berjalan sesuai dengan input coding dan input setting point. Pengujian dilakukan dalam kondisi nilai pH dibawah setting point minimal dan nilai turbidity diatas setting point maksimal yang berarti air dalam kondisi keruh dengan pH asam. Pengujian dilakukan siang hari di dalam ruangan ber-AC (Air Conditioner) dengan suhu 25oC - 26oC. Pengambilan data setiap sensor dan status kendali dilakukan melalui serial monitor yang dikirimkan oleh mikrokontroler ke personal computer. Hasil pengujian dapat dilihat pada Error! Reference source not found.. Dari hasil pengujian sistem kendali didapatkan hasil saat menit pertama sensor membaca nilai pH sebesar 4,01 dan turbidity sebesar 438 dengan ketinggian air sebesar 20,36 cm.
Tabel 4. Hasil Pengujian Sistem Kendali
|
No |
Menit ke- |
Tinggi Air (cm) |
Kualitas Air |
Status Kendali | ||
|
pH |
Turbidity |
Pompa Air |
Solenoid Valve | |||
|
1 |
13:09:06 |
20,36 |
4,01 |
438 |
Nyala |
Mati |
|
2 |
13:09:29 |
16,36 |
4,30 |
469 |
Nyala |
Mati |
|
3 |
13:09:52 |
12,93 |
4,41 |
474 |
Nyala |
Mati |
|
4 |
13:10:15 |
12,49 |
4,50 |
424 |
Nyala |
Mati |
|
5 |
13:10:56 |
15,89 |
4,54 |
434 |
Mati |
Nyala |
|
6 |
13:11:11 |
16,33 |
4,68 |
440 |
Mati |
Nyala |
|
7 |
13:11:26 |
16,59 |
4,84 |
436 |
Mati |
Nyala |
|
8 |
13:11:41 |
17,73 |
4,92 |
417 |
Mati |
Nyala |
|
9 |
13:11:55 |
18,43 |
4,97 |
403 |
Mati |
Nyala |
|
10 |
13:12:10 |
19,20 |
5,03 |
400 |
Mati |
Nyala |
|
11 |
13:12:25 |
19,87 |
4,96 |
375 |
Mati |
Nyala |
|
12 |
13:12:40 |
20,00 |
5,20 |
350 |
Nyala |
Mati |
Saat kondisi tersebut pompa air menyala hingga mencapai ketinggian 12,50 cm. Setelah pompa selesai menguras, solenoid valve mulai menyala untuk mengisi air. Solenoid valve mengisi air hingga ketinggian sesuai setting point 80% yaitu 20 cm. Apabila kondisi air yang diinginkan belum tercapai maka secara otomatis pompa air akan kembali menguras air dan solenoid valve mengisi. Dalam 1 kali menguras dan mengisi air, air yang terbuang dan terisi sebanyak 7,5 liter. Dapat dilihat dari Error! Reference source not found. bahwa adanya kenaikan nilai pH dan penurunan nilai turbidity. Hal ini menunjukan bahwa sistem kendali telah bekerja sesuai dengan coding pemrograman dan sesuai dengan setting point yang dimasukan oleh user.
Pengujian Kinerja Sistem Kontrol pH dan Turbidity
Seluruh sistem akan dilakukan uji kinerja alat dengan menggunakan metode Response Time Testing. Pengujian Response Time Testing dilakukan untuk mengetahui waktu yang dibutuhkan oleh sistem dalam menanggapi respons yang ada.
Tabel 5. Hasil Pengujian Kinerja Response Time Testing
|
No |
Kontrol On/Off |
Kondisi |
Pengulangan |
Waktu Respon (detik) |
|
1 |
Relay 1 |
Pompa |
P1 |
5,71 |
|
menguras |
P2 |
6,23 | ||
|
air |
P3 |
6,97 | ||
|
Rata-Rata |
6,30 | |||
|
2 |
Relay 2 |
Solenoid |
P1 |
0,14 |
|
valve |
P2 |
0,12 | ||
|
mengisi |
P3 |
0,16 | ||
|
air | ||||
|
Rata-Rata |
0,14 |
Response time diujikan pada kontrol on/off yang terhubung dengan relay. Relay menjadi tolak ukur
dalam menghitung response time pada sistem. Dalam penelitian ini menggunakan relay 2 channels. Relay 1 terhubung dengan pompa pengurasan, dan relay 2 terhubung dengan solenoid valve untuk mengisi air. Pengukuran response time dilakukan dengan melihat waktu respon yang terekam pada serial monitor. Pengulangan dilakukan sebanyak 3 kali sehingga didapatkan hasil P1, P2, dan P3. Hasil pengujian Response Time Testing dapat dilihat pada Error! Reference source not found..
Tabel 6. Hasil Pengukuran Waktu Menguras dan Mengisi Air
|
No |
Kondisi |
Pengulangan |
Waktu Respon | |
|
Menit |
Detik | |||
|
1 |
Menguras |
P1 |
1,45 |
87 |
|
Air |
P2 |
1,23 |
74 | |
|
P3 |
1,40 |
84 | ||
|
Rata-Rata |
1,36 |
81,67 | ||
|
2 |
Mengisi |
P1 |
2,10 |
126 |
|
Air |
P2 |
2,20 |
132 | |
|
P3 |
2,97 |
178 | ||
|
Rata-Rata |
2,42 |
145,33 | ||
Berdasarkan hasil pengujian response time, waktu rata-rata yang dibutuhkan sistem pengurasan air untuk membaca data sensor sampai memberikan output kendali berupa menyalakan pompa air sebesar 6,3 detik dan waktu rata-rata yang dibutuhkan sistem pengisian air dari pompa air berhenti sampai memberikan output kendali berupa menyalakan solenoid valve sebesar 0,14 detik. Dari hasil pengujian reponse time menunjukan bahwa sistem yang dibangun bekerja dengan baik. Suatu response time sistem dikatakan baik ketika waktu respon harus semakin cepat dengan interval waktu 0,1 detik sampai
dengan batas maksimal yang terima yaitu 10 detik (Ferry, 2019). Dilakukan pula pengukuran waktu yang dibutuhkan untuk menguras dan mengisi air pada prototipe akuarium. Pengukuran dilakukan sebanyak 3 kali pengulangan. Waktu yang dibutuhkan untuk menguras air terhitung dari pompa mulai menyala hingga pompa mati. Sedangkan waktu yang dibutuhkan untuk mengisi air terhitung dari solenoid valve mulai menyala hingga solenoid valve mati. Hasil pengukuran waktu menguras dan mengisi air dapat dilihat pada Error! Reference source not found.. Berdasarkan data hasil pengukuran waktu pengurasan dan pengisian air, didapatkan rata-rata waktu yang dibutuhkan untuk menguras air dalam prototipe akuarium sebesar 81,67 detik, sementara rata-rata waktu yang dibutuhkan untuk mengisi air sebesar 145,33 detik. Dari hasil pengukuran waktu menguras dan mengisi air dapat dikatakan bahwa sistem dapat melakukan proses pengurasan dan pengisian air sesuai dengan kondisi yang terekam oleh sensor dan setting point yang telah diinput.
KESIMPULAN
Berdasarkan penelitian yang telah dilakukan berhasil dirancang dan dibangun prototipe sistem kontrol pH dan turbidity akuarium berdimensi 40 cm x 25 cm x 28 cm yang terbuat dari kaca. Pengujian sensor yang digunakan menghasilkan nilai uji fungsi yang baik yaitu sensor pH E-201 BNC memiliki error pada larutan asam, basa, dan netral sebesar 0,35%, 0,72%, dan 0,49% serta akurasi sebesar 99,65%, 99,28%, dan 99,51%. Fungsi dari sensor turbidity SEN0189 telah bekerja sesuai kalibrasinya dengan TDS meter. Pengujian sensor ultrasonik HC-SR04 memiliki error sensor sebesar 0,53% dan akurasi sensor sebesar 99,47%. Sistem kendali yang dibangun untuk menyalakan dan mematikan pompa air dan solenoid valve bekerja dengan baik sesuai dengan coding dan setting point yang diatur oleh pengguna. Hasil pengujian kinerja response time rata-rata waktu yang dibutuhkan sistem pengurasan air sebesar 6,3 detik dan waktu rata-rata yang dibutuhkan sistem pengisian air sebesar 0,14 detik. Hasil pengukuran pengurasan dan pengisian air didapatkan rata-rata waktu yang dibutuhkan untuk menguras air sebesar 81,67 detik, dan rata-rata waktu yang dibutuhkan untuk mengisi air sebesar 145,33 detik. Sehingga perancangan sistem kontrol pH dan turbidity akuarium telah berjalan sesuai perencanaan.
DAFTAR PUSTAKA
Bareta, B. P. C., Harijanto, A., & Maryani, M. 2021. Rancang Bangun Alat Ukur Sistem Monitoring pH, Temperatur, dan Kelembapan Akuarium
Ikan Hias Berbasis Arduino Uno. Jurnal Pembelajaran Fisika, 10(1), 1.
https://doi.org/10.19184/jpf.v10i1.21900
Caballero, D. C. 10 Maret 2017. How to use a pH sensor with Arduino. https://scidle.com/how-to-use-a-ph-sensor-with-arduino/, diakses 11 Juli 2022
Deriyanti, A. 2016. Hubungan Kualitas Air Dengan Prevalensi Myxobolus Pada Ikan Koi (Cyprinus carpio) di Sentra Budidaya Ikan Koi Kabupaten Blitar, Jawa Timur. Universitas Airlangga.
Direktorat Jenderal Perikanan Budidaya Direktorat Perbenihan. 2006. Petunjuk Teknis Balai Benih Ikan Sentral (BBIS), Balai Benih Ikan Lokal (BBIL), Balai Benih Udang (BBU), Balai Benih Udang Galah (BBUG) dan Balai Benih Ikan Pantai (BBIP).
Direktorat Pengolahan dan Bina Mutu. 2019. Produk Perikanan Nonpangan.
Ebeling, J. M., Welsh, C. F., & Rishel, K. L. 2006. Performance Evaluation of an Inclined Belt Filter Using Coagulation/Flocculation Aids for the Removal of Suspended Solidsand
Phosphorus from Microscreen Backwash
Effluent. Aquaculture Engineering, 61–77.
Ferry. 2019. Response Time Testing. https://sis.binus.ac.id/2019/05/13/response-time-testing/, diakses 16 Juli 2022
Indriani, A., Witanto, Y., Supriyadi, & Hendra. 2017. Sistem Kontrol Kekeruhan dan Temperatur Air Laut Menggunakan Microcontroller Arduino Mega. Jurnal Teknik Mesin, 6(3). https://doi.org/10.22441/jtm.v6i3.1830
Marian, P. 2022. HC-SR04 Datasheet. https://www.electroschematics.com/hc-sr04-datasheet/, diakses 22 Juni 2022
Novitasari, A. T. 2017. Rancang Bangun Alat Penggantian Air dan Pemberian Pakan Secara Otomatis pada Akuarium Ikan Hias Berbasis Mikrokontroler. Universitas Negeri Semarang.
Papilon, U. M., & Efendi, M. 2017. Ikan Koi. Penebar Swadaya.
https://www.google.co.id/books/edition/IKAN _KOI/Iy0-DwAAQBAJ?hl=id&gbpv=0
Payara, M. F., Martanto, Harini, B. W., Merucahyo, P. Y., & Priantoro, T. 2014. Rancang Bangun Sistem Kendali Kualitas Air pada Model Kolam Ikan.
Pramana, R. 2018. Perancangan Sistem Kontrol dan Monitoring Kualitas Air dan Suhu Air Pada Kolam Budidaya Ikan. Jurnal Sustainable:
Jurnal Hasil Penelitian Dan Industri Terapan, 7(1), 13–23.
https://doi.org/10.31629/sustainable.v7i1.435
Pratama, D. A. 2018. Pengairan dan Pemberian Pakan Otomatis pada Akuarium Berbasis Arduino. In Skripsi Institut Teknologi Nasional Malang. Institut Teknologi Nasional Malang.
Putrawan, I. G. H., Rahardjo, P., & Agung, I. G. A. P. R. 2020. Sistem Monitoring Tingkat Kekeruhan Air dan Pemberi Pakan Otomatis pada Kolam Budidaya Ikan Koi Berbasis NodeMCU. Majalah Ilmiah Teknologi Elektro, 19(1). https://doi.org/https://doi.org/10.24843/MITE.2 020.v19i01.P01
Rahman, A. 2008. Kajian Kandungan Phospat dan Nitrat Pengaruhnya terhadap Kelimpahan Jenis Plankton di Perairan Muara Sungai Kelayan. Kalimantan Scientiae, 32–44.
Saputra, G. A. 2020. Analisis Cara Kerja Sensor Ph-E4502c Menggunakan Mikrokontroler Arduino Uno Untuk Merancang Alat Pengendalian Ph Air Pada Tambak. December, 1–45.
https://doi.org/10.13140/RG.2.2.32110.84809
Toni, N., & Widiasari, I. R. 2021. Perancangan Sistem Kontrol Kekeruhan Air Berbasis Website Internet of Things. JATISI (Jurnal Teknik Informatika Dan Sistem Informasi), 8(3), 1515–1528.
https://doi.org/https://doi.org/10.35957/jatisi.v8 i3.1102
Wadu, R. A., Ada, Y. S. B., & Panggalo, I. U. 2017. Rancang Bangun Sistem Sirkulasi Air Pada Akuarium/Bak Ikan Air Tawar Berdasarkan Kekeruhan Air Secara Otomatis. Jurnal Ilmiah FLASH, 3(1), 1–10.
http://www.jurnal.pnk.ac.id/index.php/flash/art icle/view/131
Yudaningtyas, E. 2017. Belajar Sistem Kontrol: Soal dan Pembahasan. Universitas Brawijaya Press. https://www.google.co.id/books/edition/Belajar _Sistem_Kontrol/UjZTDwAAQBAJ?hl=id&gb pv=0
190
Discussion and feedback