The Obstacles Detector with Tahani Fuzzy Logic as The Tool for Blind People
on
LONTAR KOMPUTER VOL. 9, NO. 2, AUGUST 2018
DOI : 10.24843/LKJITI.2018.v09.i02.p02
Accredited B by RISTEKDIKTI Decree No. 51/E/KPT/2017
p-ISSN 2088-1541
e-ISSN 2541-5832
Obstacles Detector with Tahani Fuzzy Logic as The Tool for Blind People
Abdurrasyid1, Rakhmat Arianto2, Indrianto3, Bramantyo Adi Nugroho4
-
1,2,3,4Informatics, Sekolah Tinggi Teknik PLN
Menara PLN, Jl. Lingkar Luar Barat, Duri Kosambi, Cengkareng, Jakarta Barat, Indonesia 1rasyid@sttpln.ac.id 2arianto@sttpln.ac.id
3indrianto@sttpln.ac.id 4bramantyoadi30@gmail.com
Abstract
Indonesian Blind Union said that the number of blind people in Indonesia reached 3.75 million and 40% in school-age children, and this number will continue to increase each year. Blind people will need the tool to help their day to day activities. The research that has been developed still have flaws, whereas they do not provide the sound of information to the people with visual impairment about the obstacle, included no scientific method used in the research, especially about how the appliance works. This research does not only provide ‘beep’ sound when obstacles are detected, but also provides audio information through a headset to the blind people. There are three obstacles detected, they are holes, bumps, and walls, and it can help the blind people to decide whether to dodge or to step high. To support the audio output and the design processing speed of the appliance, this research uses Raspberry Pi 3 mini PC, three ultrasonic sensors that are used to detect obstruction objects upright, hole and bump, and to initialize the initial values before it detects the obstruction. Tahani fuzzy logic method used to different obstacles such as the bumps, flat surfaces, or holes so the blind people feel much safer while walking.
Keywords: Blind People, Raspberry Pi, Ultrasonic Sensor, Tahani Fuzzy Logic, Obstacles Detector.
According to the Ministry of Health, 1.5% of Indonesia's population suffers from blindness, this is in line with data from the Indonesian Blind Union which states that the number of blind people in Indonesia reaches 3.75 million people and 40% of them are school-aged children [1], and this number can continue to grow with Indonesia's population growth rate based on Indonesian Statistic Center data which reaches 1.36% per year [2], [3]. This should be a concern to the nation, especially researchers in Indonesia so that they can be able to assist the visually impaired people in achieving the second principle of Pancasila: "Just and Civilized Humanity" and the fifth principle of Pancasila "Justice for the whole People of Indonesia".
A blind person will need more effort to blend in with the surrounding environment [4], and yet the main problem faced by the blind person is the impairment of the sense of vision so that high sensitivity to the surrounding circle is required to maintain their safety; and [5] so they will need tools in their daily activities such as to walk, read and others.
Previously, many studies have been done by utilizing the subjects with visual impairment, where the previous researches used many ultrasonic sensors and image processing, but seeing from the researches that have been developed, there are still some shortcomings, e.g. they are only detecting obstacles in front of the person, but not detecting holes or bumps, and the output is only a ‘beep’ sound [6]; [7] there is also an output of vibration [8], [9]; all research pinned the Arduino as microcontroller and ultrasonic sensor on the stick; but some are fixed to the glasses [10]; while the blind does not only require a ‘beep’ alert but needs an audio output in order to be more helpful [11]; and it will be difficult if it still uses an Arduino microcontroller.
Fuzzy logic is a popular method pinned on artificial intelligence studies. Some researches using fuzzy to detect objects in real time [12], [13], controlling the temperature of heat exchangers [14], used in the world of health [15] to help detect Parkinson's disease [16], the classification of heartbeat [17], and detects beef cattle diseases [18].
This research can be used in the social field to help the visually impaired people in recognizing the obstacle object which then helps to improve their security in walking and is expected to reduce the occurrence of accidents caused by obstructions such as holes, bumps or other silent objects in front of them.
The purpose of this research is to design models of walking aids for the blind people which can detect obstacles, holes and bumps in front of the user that will automatically produce an audio warning through an output device. This research utilizes Raspberry PI 3 mini PC that has more capability than Arduino whereas Arduino does not have direct output through 3.5mm Jack. Furthermore, this research required large storage to store an audio template, other than that, with Raspberry PI this research can be developed by implementing pattern recognition because image processing requires more resources. Raspberry is not only functions as a microcontroller but also can function as a simple web server [19], which is equipped with three ultrasonic sensors that have a maximum transmit distance of 4 meters. The entire circuit is mounted on a waist bag that can be used by the visually impaired person. Tahani fuzzy logic is used to process inputs from ultrasonic sensors so as to determine the type of obstacles that exist in front of them.
The Fuzzy set theory is the basis of Fuzzy logic, in which the role of membership degrees that determines the existence of elements in a set is very important and this is the main character in the reasoning process of Fuzzy logic [20].
Fuzzy logic can implement a database which capable of handling the cryptic criteria called fuzzy database Tahani Model, where the Tahani model fuzzy database is a database which capable of mapping a numerical data input (crisp) into linguistic data (cryptic) [21]. Some studies use this method to help to make decisions in the selection of new hires [22], college tuition [23], good days of marriage [24], best graduates[25], and house purchasing process [21].
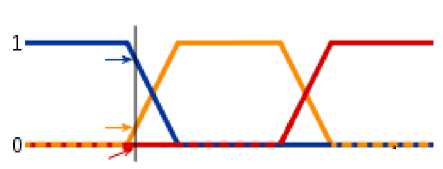
Figure 1. Fuzzy logic curve
Increase linear representation is expressed by the equation:
≤ a
Decrease linear representation is expressed by the equation:
{b-x
-
-— ;a ≤ x ≤ b,
0-,≥b
[26]
Before the research started, the first interview was done to the blind adults, and from the results of interviews it was found that all this time, people with visual impairment still find the difficulties to detect uneven road conditions, especially holes. This condition will be worse for the young blind people. This research uses Raspberry PI mini PC to cover the deficiencies in previous research which mostly uses Arduino microcontroller, so it can provide audio output, equipped with 3 ultrasonic sensors, which have their usefulness, described in table 1 below.
Table 1. Ultrasonic sensor position
|
Ultrasonic Censors |
Position |
Usages |
|
1 |
Facing down |
Determine the height value before the blind starts walking |
|
2 |
Tilting down |
To detect holes |
|
3 |
Facing forward |
To detect static objects up front |
All three ultrasonic sensors are connected directly to the Raspberry, while the workflow model tool created is illustrated in Figure 2 below.
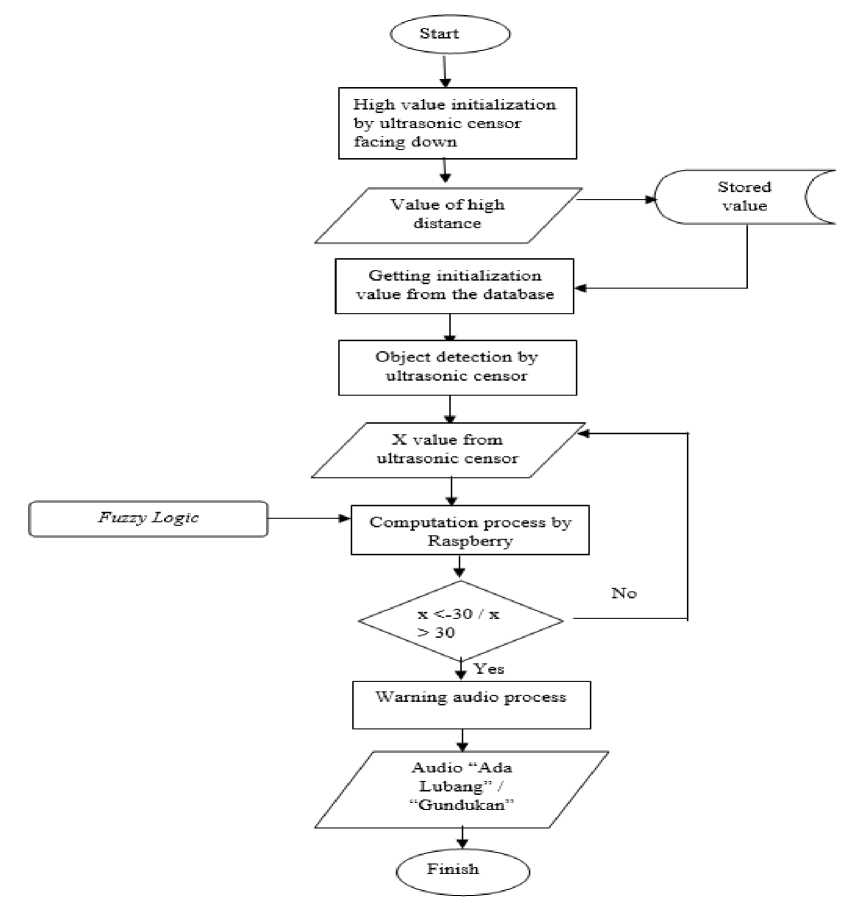
Figure 2. Tool workflow diagram
To get the calculation of holes, bumps or obstacles, it needs to perform several stages:
-
1. Getting the initial value (the initial value obtained when the tool is turned on)
-
2. Getting a new value (new value gained after the initial condition of the tool is completed)
-
3. Finding the difference value by the initial value minus the new value.
-
4. Enter the value of the difference into the fuzzy logic formula.
-
5. After getting the value of the fuzzy logic formula then it will be compared and picked the highest value.
In this study, there are three values that state the type of barrier as shown in Figure 3 below:
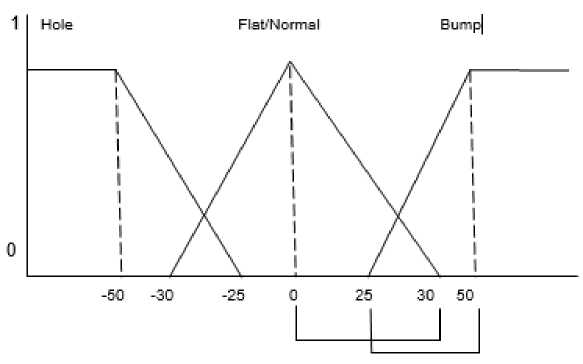
Figure 3. Fuzzy logic graphic
From figure 3 above, it is determined the formula to find out the following obstacles. The formula determines whether the path ahead is bumpy or flat/normal.
The formula to determine whether there are holes or flat/normal.
The value in the formula refers to the fuzzy logic graph created where the unit used is in millimeters (mm).
In this study 3 HC-SR04 as an ultrasonic sensor in which each sensor has its own function: detecting objects present in front of the user, detecting barriers at the bottom of the user, and detecting user heights. As the brain of the circuit this research also used Raspberry Pi Mini PC so the computing process can be done well, furthermore users can use the device dynamically using the battery (power bank) as a power source, and earphone as a voice output in order to warn users of an obstacle nearby. The set of tools that was built is depicted in Figure 4.
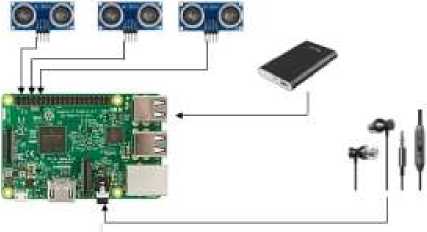
Figure 4. Tool circuit series
The result of the design of the tool that was built is illustrated in Figure 5 where the HC-SR04 sensor that serves to detect the object in front of the user will be installed 90º from the Raspberry Pi position, while the sensors are enabled to detect the user's bottom obstacle installed 45º to tilt down, and sensor to measure user height installed 90º down. To determine the position, has been experimented several times to get the best results.
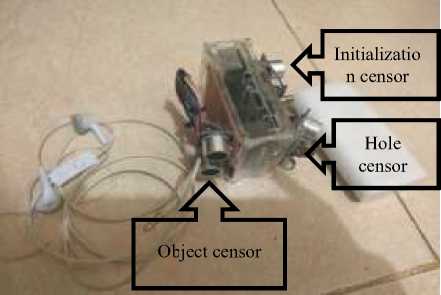
Figure 5. Tool circuit result
To be easily used by the user, the series of the tools are placed on the waist bag where Raspberry Pi and the mounted sensors are placed on the front to detect the object properly and the power bank as a power resource is placed in the inner bag of the waist bag as on Figure 6.

Figure 6. Censor testing
After the tool is packed properly, the next step is doing the test using 3 categories, namely: accuracy testing of object distance, accuracy testing of hole diameter, and accuracy testing of holes and bumpy objects.
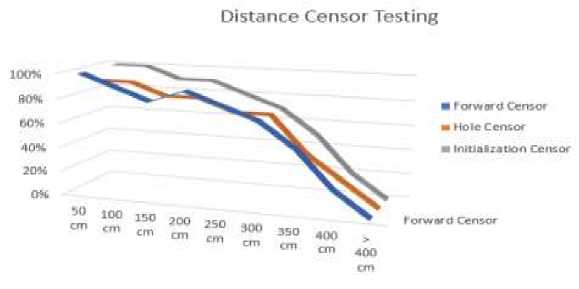
Figure 7. Distance Censor test result
The results of the accuracy testing of the sensor to the distance is made 10 times towards different objects with different distances, so that for one censor, the test was done 80 times, and the result obtained was that the three sensors are quite accurate to a distance of 3 meters although the specification of the sensor can work up to a distance of 4 meters.
The sensor accuracy test of the hole diameter of the results can be seen in Figure 8 below.
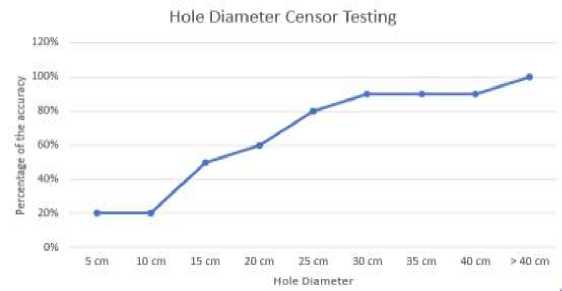
Figure 8. Hole diameter test result
The test was performed 5 times on the hole diameter of for each size, thus there were 95 times tests done. The results obtained is that the sensor is quite accurate to the hole with a diameter condition > = 20 cm.
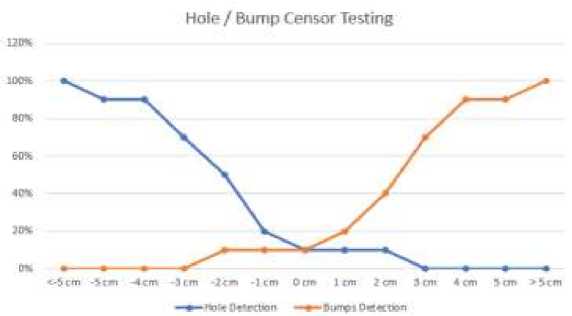
Figure 9. Hole/bump test result
After the testing process, the accuracy of the censor towards the distance, next step is to test the censor towards the holes and bumps, as shown in Figure 9 above. The test was done by the same number of tests as before, i.e. 10 times, while the distance obtained is the difference of the initialization value minus the value of the censor input. It is found that for testing of the hole with a diameter > 20 cm, the sensor detects the hole quite accurately on the condition of the hole that has a depth > = 3 cm, thus the accuracy of the censor is quite accurate if the bump height is > = 3cm.
To create or to build a smart bag model as a visual aid tool in this research is done by using prototype development method and Tahani Fuzzy logic computation method. The design of this study consists of the design of hardware that includes the main components such as Raspberry Pi, HC-SR04/Ultrasonic censor, and power bank as a power source.
The device works when Raspberry Pi gets the power supply; if the reading tool has its difference on the three sensors then Raspberry will automatically read them as an obstacle, bump, or hole. Other components such as earphones will work in accordance with the command.
In detecting obstacles using fuzzy logic calculations, it requires the value of the difference from the ultrasonic censor where the value difference is used in the fuzzy logic calculation formula to determine the obstacle. After obtaining the calculated value of the fuzzy logic formula, it will take the largest value of the logical fuzzy formula to determine the obstacles.
The tool can already make a sound that includes obstacles, bumps and holes. Where in the previous research, the tool can only issue a ‘beep’ sound or vibration only.
After testing the accuracy of the censor to the distance of the object, the accuracy of the equipment can work quite well up to a distance of 3 meters, while testing the accuracy of the censor to the diameter of the hole, a fairly good accuracy with hole diameter conditions of more than 20 cm was gained after the test, while testing the sensor accuracy of the hole and the bump has a pretty good accuracy with the hole depth conditions > = 3cm, and the height of the bump > = 3cm.
Acknowledgment
This research is funded by the Directorate of Research and Community Service, Directorate General of the Research and Development Strengthening, Ministry of Research, Technology and Higher Education on the Research Scheme of Beginner Lecturers, and we also thank the STT PLN for the support and assistance of the given complementary funds.
References
-
[1] Suyopratomo, “Tunanetra bukan Obyek,” Media Indonesia, Solo, 26-Jan-2016.
-
[2] Badan Pusat Statistik Indonesia, Statistik Indonesia, Statistical Yearbook of Indonesia
2017. DKI Jakarta: Badan Pusat Statistik, 2017.
-
[3] Indonesia Business Council for Sustainable Development, “Visi Indonesia 2050:
Kontribusi Sektor Bisnis bagi Indonesia Masa Depan,” 2015.
-
[4] P. Engelbrektsson, I. C. M. Karlsson, B. Gallagher, H. Hunter, H. Petrie, and A.-M.
O’Neill, “Developing a navigation aid for the frail and visually impaired,” Univers. Access Inf. Soc., vol. 3, no. 3, pp. 194–201, 2004.
-
[5] A. Alkhanifer and S. Ludi, “Towards a situation awareness design to improve visually
impaired orientation in unfamiliar buildings: Requirements elicitation study,” 2014 IEEE 22nd Int. Requir. Eng. Conf. RE 2014 - Proc., pp. 23–32, 2014.
-
[6] G. W. Arminda, A. Hendriawan, R. Akbar, and L. Sulistijono, “Desain Sensor Jarak
Dengan Output Suara Sebagai Alat Bantu Jalan Bagi Penyandang Tuna Netra,” Politeknik Elektronika Negeri Surabaya, 2011.
-
[7] A. N. Suryavanshi, M. S. Chavan, and S. B. Jadhav, “Assistance for visually impaired
people,” IJRASET, vol. 4, no. Iv, pp. 371–375, 2016.
-
[8] K. T. Atmojo, “ALAT BANTU JALAN UNTUK TUNANETRA DENGAN SENSOR
PENDETEKSI LUBANG BERBASIS MIKROKONTROLLER ATMEGA 8,” Jurnal Elektronik Pendidikan Teknik Informatika, Vol. 5, No. 3, pp. 1–7, 2016.
-
[9] M. A. Heryanto and H. Suprijono, “Aplikasi Gelombang Ultrasound Pada Tongkat Putih
Untuk Peringatan Dini Bagi Penyandang Tuna Netra,” Jurnal Dian, Vol. 11, No. 1, pp. 54–67, 2011.
-
[10] M. N. Meizani, A. Muid, and T. Rismawan, “PEMBUATAN PROTOTIPE KACAMATA ELEKTRONIK UNTUK TUNA NETRA BERBASIS MIKROKONTROLER MENGGUNAKAN SENSOR ULTRASONIK,” Jurnal Coding, Sistem Komputer Untan, Vol. 3, No. 2, pp. 88–99, 2015.
-
[11] D. Pratama, D. A. Hakim, Y. Prasetya, N. R. Febriandika, M. Trijati, and U. Fadlilah, “Rancang Bangun Alat dan Aplikasi untuk Para Penyandang Tunanetra Berbasis Smartphone Android,” Khazanah Informatika Jurnal Ilmu Komputer dan Informatika, Vol. 2, No. 1, pp. 14–19, 2016.
-
[12] N. V. Lopes, P. Couto, A. Jurio, and P. Melo-Pinto, “Hierarchical fuzzy logic based approach for object tracking,” Knowledge-Based Systems, vol. 54, December, pp. 255– 268, 2013.
-
[13] C. Yoon, M. Cheon, and M. Park, “Object tracking from image sequences using adaptive
models in fuzzy particle filter,” Information Sciences, vol. 253, December, pp. 74–99, 2013.
-
[14] R. Syahputra, “Simulasi Pengendalian Temperatur Pada Heat Exchanger Menggunakan Teknik Neuro-Fuzzy Adaptif,” Jurnal Teknologi Teknik Elektro UMY, Vol. 8, No. 2, pp. 161–168, 2015.
-
[15] A. Amirkhani, E. I. Papageorgiou, A. Mohseni, and M. R. Mosavi, “A review of fuzzy cognitive maps in medicine: Taxonomy, methods, and applications,” Computer Methods Programs Biomed, Vol. 142, April, pp. 129–145, 2017.
-
[16] C. Ornelas-Vences, L. P. Sanchez-Fernandez, L. A. Sanchez-Perez, A. Garza-
Rodriguez, and A. Villegas-Bastida, “Fuzzy inference model evaluating turn for Parkinson’s disease patients,” Comput. Biol. Med., Vol. 89, pp. 379–388, 2017.
-
[17] U. Hasanah, L. Resita, A. Pratama, and I. Cholissodin, “Perbandingan Metode Svm,
Fuzzy-Knn, Dan Bdt-Svm Untuk Klasifikasi Detak Jantung Hasil Elektrokardiografi,” J. Teknol. Inf. dan Ilmu Komput., vol. 3, no. 3, pp. 201–207, 2016.
-
[18] D. Kurnianingtyas, W. F. Mahmudy, and A. W. Widodo, “Optimasi Derajat Keanggotaan Fuzzy Tsukamoto Menggunakan Algoritma Genetika Untuk Diagnosis Penyakit Sapi Potong,” Jurnal Teknologi Informatika dan Ilmu Komputer, Vol. 4, No. 1, p. 8, 2017.
-
[19] A. Abdurrasyid, H. B. Agtriadi, and L. Alifiana, “Monitoring Stabilitas Kemiringan Kapal Penumpang Untuk Antisipasi Kecelakaan,” in Seminar Nasional Sains dan Teknologi, 2017, no. November, pp. 1–2.
-
[20] R. Anggraeni, W. Indarto, and S. Kusumadewi, “SISTEM PENCARIAN KRITERIA KELULUSAN MENGGUNAKAN METODE FUZZY TAHANI Kasus pada Fakultas Teknologi Industri Universitas Islam Indonesia,” Media Informatika, Vol. 2, No. 2, pp. 65– 74, 2004.
-
[21] R. Efendi and R. Hidayati, “Aplikasi Fuzzy Database Model Tahani Dalam Memberikan Rekomendasi Pembelian Rumah Berbasis Web,” Jurnal Pseudocode, Vol. 1, No. 1, pp. 2355–5920, 2014.
-
[22] B. Prasetiyo and N. Baroroh, “Fuzzy Simple Additive Weighting Method in the Decision Making of Human Resource Recruitment,” Lontar Komputer: Jurnal Ilmiah Teknologi. Informasi, Vol. 7, No. 3, p. 174, 2016.
-
[23] A. K. Muchsin and M. Sudarma, “Penerapan Fuzzy C-Means Untuk Penentuan Besar Uang Kuliah Tunggal Mahasiswa Baru,” Lontar Komputer: Jurnal Ilmiah Teknologi. Informasi, Vol. 6, No. 3, p. 175, 2015.
-
[24] I. K. Suwintana, “Penentuan Hari Baik Perkawinan di Bali Berbasis Logika Fuzzy,”
Lontar Komputer: Jurnal Ilmiah Teknologi. Informasi, Vol. 5, No. 1, pp. 392–403, 2014.
-
[25] A. Rusman, “Logika fuzzy tahani sistem penunjang keputusan penentuan lulusan
terbaik,” Jurnal Informatika, Vol. 3, No. III, pp. 31–40, 2016.
80
Discussion and feedback