Optimasi Performansi Sistem Kontrol Prosthesis Lengan Dengan Menggunakan Metode PID Tuning Dengan MATLAB
on
165
Majalah Ilmiah Teknologi Elektro, Vol.22, No.2, Juli-Desember 2023 DOI: https://doi.org/10.24843/MITE.2023.v22i02.P02
Optimasi Performansi Sistem Kontrol Prosthesis Lengan Dengan Menggunakan Metode PID Tuning Dengan MATLAB
Karuna K.S Prasad1, Ilham Fauzi2, I.M.E. Darmayasa Adiputra3, I.M.P. Arya Winata4, I.W. Widhiada5
[Submission: 11-02-2023, Accepted: 05-03-2023]
Abstract— The arm prosthesis in this study will analyze the control system of one finger with 3 joints, the aim is to determine the optimal performance of the control system for the prosthesis using 3 combinations of software, namely autodesk fusion 360, autodesk inventor as the design of the arm prosthesis, and matlab simulink simscape multibody as a simulation of PID tuning with a value of 4.0715 for proportional (P), 99.3021 for integral (I), and 0.039866 for (D) resulting in a movement performance with a rise time of 0.00431 seconds, settling time of 0.026 seconds, and overshoot of 4.76%.
Intisari— Prosthesis lengan pada penelitian ini akan melakukan analisis sistem kontrol salah satu jari yang memiliki 3 joint tujuannya adalah untuk mengetahui performa optimal dari sistem kontrol terhadap prosthesis dengan menggunakan 3 gabungan software yaitu autodesk fusion 360 autodesk inventor sebagai desain prosthesis lengan lalu matlab simulink simscape multibody sebagai simulasi tuning PID dengan nilai 4,0715 untuk proportional (P), 99,3021 untuk integral (I), dan 0,039866 untuk (D) menghasilkan performa pergerakan yang memiliki rise time sebesar 0,00431 detik, settling time sebesar 0,026 detik, dan overshoot sebesar 4,76%.
Kata Kunci— prosthesis lengan, PID Controller, Tuning, DC Motor.
Terdapat 15 dari 100 orang di duniamengalami disabilitas, yakni kondisi individu yang tidak mampu melaksanakan suatu aktivitas secara normal karena kehilangan fungsi tubuh, baik secara psikologi, fisiologi, maupun anatomi[1]. Hambatan berupa kehilangan fungsi bagian tubuh akan menyebabkan kesulitan dalam melakukan kegiatan secara normal.Kegiatan sehari-hari yang membutuhkan banyak gerakan, tentu akan menyulitkanpenyandang disabilitas dengan cacat pada bagian tubuh yang memiliki peranan besar dalam mobilitas, seperti anggota gerak tubuh. Hal ini tentu akan berdampak pada terhambatnya kegiatan sosial yang hendak dilakukan oleh penyandang[2]. Terlebih lagi anggota gerak tubuh, khususnya lengan dan tangan, mengambil andil penting dalam sebagian
besar aktivitas manusia[3]. Tidak sedikit penyandang disabilitas ini merupakan pasien yang telah melalui proses amputasi lengan dan tangan akibat cedera dari kecelakaan besar. studi yang dilaksanakan oleh [4] bahkan menunjukkan bahwa salah satu kawasan yang memiliki angka amputasi tinggi berada di Asia Tenggara.
Teknologi prosthetik telah memberikan manfaat yang signifikan bagi penyandang disabilitas amputasi lengan [5]. Penggunaan prosthetis lengan dapat membantu penyandang disabilitas amputasi lengan untuk melakukan aktivitas sehari— hari deengan lebih lebih mandiri dan memperoleh kembali rasa percaya diri [6]. Penggunaan prosthesis lengan juga dapat memperebaiki kualitas hidup dan meningkatkan partisipasi sosial bagi penyandang disabilitas amputasi lengan[7]. Namun, pada penggunaan prosthesis lengan masih memiliki beberapa kendala dalam mengendalikannya. Salah satu cara untuk meningkatkan kualitas teknologi prosthetik adalah mengembangkan sistem kontrol yang lebih baik [7]. Sistem kontrol berbasis sinyal otot pada prosthesis lengan juga dapat dikombinasikan dengan algoritma kontrol adaptif untuk meningkatkan presisi gerakan [8]. Salah satu kontrol adaptif yang digunakan adalah algoritma MRAC (model reference adaptive control).
Pemodelan dari prosthesis tangan telah melalui minat penilitian yang signifikan diantara para peneliti. Desain prosthesis lengan yang dibuat oleh Rossini dkk dikendalikan untuk mengendalikan tangan biomekanik yang terkoneksi oleh system saraf dengan menghubungkan elektroda pada saraf manusia[9]. Penggunaan DC motor pada prosthesis lengan memungkinkan kontrol yang lebih baik terhadap gerakan lengan [10]. Berbagai metode tuning transfer function dari model lengan diimplementasikan ke dalam model dinamik dari prosthetik lengan pasien yang lengan bagian atasnya diamputasi. Tuning PID dan robust control digunakan untuk mengoptimalkan sistem kontrol pada prosthesis lengan [11]. Penggunaan PID dan kontrol adaptif dengan model referensi digunakan untuk mengontrol prosthesis lengan dengan tujuan meningkatkan kinerja stabilitas sistem kontrol [12]. Sementara pada penggunaan robust control pada sistem prosthesis lengan dapat meningkatkan kestabilan sistem dan mengurangi kesalahan dalam gerak[13]. Ketidakpastian sistem dan gangguan sistem pada prosthesis lengan juga dapat diatasi dengan metode robust control [14].
Target dari paper ini adalah untuk mengontrol pergerakan jari dari prosthetik tangan dengan menggunakan kontroller
adaptif dan referensi model yang diinginkan. Metodologi yang digunakan adalah desain kontroller adaptif yang disesuaikan dengan mekanisme adaptasi menggunakan MRAC untuk menyelesaikan masalah pada prosthetik tangan yang terkait dengan proses mass-damp-spring dan masalah sistem yang tidak pasti[15],[16].
Kegiatan penelitian ini dirancang dengan metode sebagai berikut: persiapan studi yaitu dilakukan dengan membaca literatur berkaitan dengan metode digunakan. kemudian melakukan desain 3D menggunakan software fusin 360. Langkah selanjutnya meng-import desain lalu di-assembly pada software Autodesk Inventor untuk di-export ke dalam format file MATLAB yaitu xml. Kemudian buka file tersebut pada Simulink Simscape Multibody tambahkan pemodelan transfer function DC Motor yang sudah diintegrasikan dengan blok PID controller yg dihubungkan ke joint yg terdapat pada desain. Lakukan beberapa tuning pada PID controller sampai rising time, overshoot, dan settling time optimal. Data hasil simulasi Simscape Multibody.

Gambar 1. Diagram alir penelitian.
-
2.1 Desain
Desain prosthetik ini menggunakan software Autodesk Fusion 360. Hal ini dikarenakan keunggulan software yang memiliki fitur teamwork sehingga pembuatan desain 3D model prosthetik lengan lebih cepat karna dikerjakan bersama-sama. Namun, Autodesk Fusion 360 tidak dapat dihubungkan secara langsung ke software MATLAB untuk sistem kontrolnya di analisa. Maka dari itu dibutuhkan software desain yang dapat dihubungkan dengan software MATLAB seperti Autodesk Inventor. Langkah-langkah dalam pemodelan sebagai berikut:
-
a. Membuat 3D model semua part prosthetik lengan dari Fusion 360
-
b. Import file 3D model semua part dari Fusion 360 ke Inventor
-
c. Melakukan assembly part di Inventor
-
d. Export file assembly dari inventor ke file yg memiliki format .xml agar dapat di baca oleh software matlab.
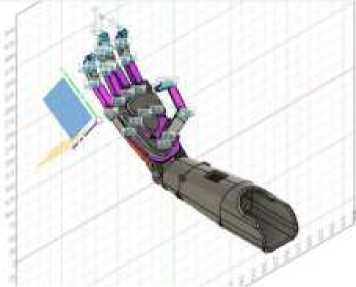
Gambar 2. 3D Prosthesis Lengan
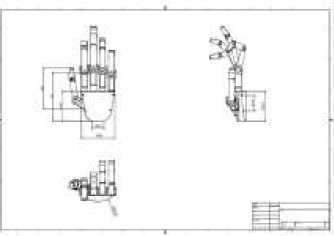
Gambar 3. Gambar kerja prosthesis lengan
-
2.2 MATLAB Simscape Multibody
Simulasi Simscape Multibody digunakan untuk mengoptimalkan sistem kontrol adaptif dari prosthetik lengan yang sudah di desain. Pada paper ini digunakan software MATLAB dengan metode MRAC PID Controller.
-
a. Import file assembly prosthetik lengan yang sudah berformatkan xml.
-
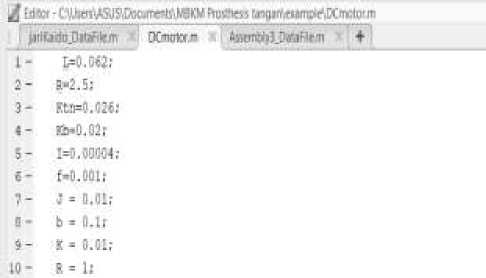
b. Membuat subsistem pemodelan transfer function DC motor dan menginput semua nilai dari elemen yg terdapat pada transfer function.
-
c. Integrasikan subsistem DC Motor dengan PID controller dan scope untuk membuat sistem kontrol yang akan di hubungkan ke joint.
-
d. Berikan input signal ke joint melewati sistem kontrol sesuai dengan pergerakan yang diinginkan.
-
e. Lakukan tuning pada PID controller untuk memperoleh performa sistem kontrol yang optimal atau setidaknya memiliki overshoot sebesar 5% atau lebih kecil.
f. Jalankan simulasi dengan menekan ikon ‘run’ untuk melihat pada grafik scope terkait perbandingan antara signal input dan kinerja output dari prosthesis tangan.
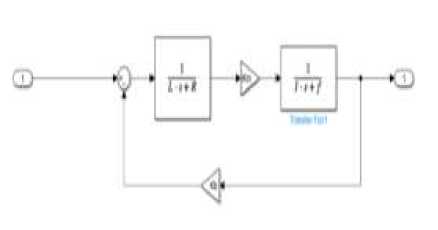
Dalam metode PID, pemodelan sistem sangatlah penting[17]. Sistem kontrol close-loop dan open-loop dapat mempengaruhi hasil kinerja yang akan diperoleh. Pada
Karuna K.S Prasad: Optimasi Performansi Sistem Kontrol…
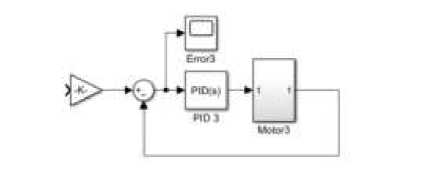
DOI: https://doi.org/10.24843/MITE.2023.v22i02.P02 rangkaian blok yang digunakan bersifat open loop seperti Gambar 4.
Sedangkan secara mekanikal didasarkan pada gerak rotasi dari Hukum Newton II yang mana persamaannya yaitu:
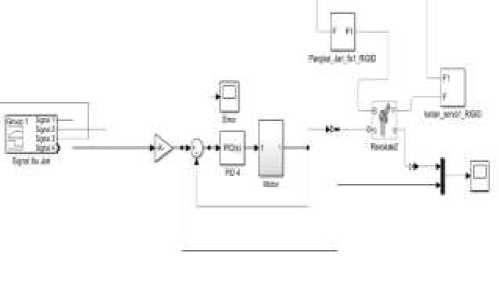
Gambar 4. Rangkaian Blok Simulink sistem kontrol DC Motor open-loop.
Kti(t)-Kbω(t)=jω½ (3)
Persamaan (3) diubah ke domain frekuensi menggunakan transformasi Laplace menjadi:
KtI(s) = (Js + Kb)ω(s) (4)
Sehingga gabungan persamaan elektrikal dan mekanikal berubah menjadi pemodelan matematika yang digunakan untuk DC servo motor sebagai berikut.
^(s) _ _____________Ktn_____________
(5)
Eci(S) s[l a] S2+(L af+Raf)+KtnK t,}
-
2.3 Motor DC
Dimana,
Motor DC adalah motor listrik yang memerlukan suplai tegangan arus listrik searah pada kumparan medan untuk diubah menjadi energi mekanis [18]. Motor DC bekerja berdasarkan prinsip medan magnet yang berputar, dimana arus listrik menghasilkan medan magnet berinteraksi dengan medan magnet tetap untuk menghasilkan gaya gerak[19]. Pemodelan Motor DC ditunjukkan ke dalam rangkaian ekivalen seperti pada gambar 5.
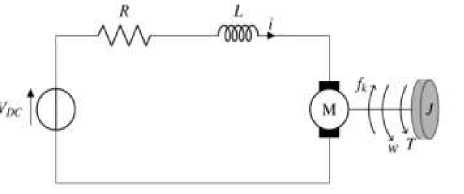
Gambar 5. Rangkaian Ekivalen Motor DC
Untuk menggerakan joint dari jari prosthesis, terdapat DC servo motor untuk menggerakannya. Pemodelan Motor DC dapat di peroleh dengan analisa secara mekanikal dan elektrikal[20]. Secara elektrikalnya, hokum yang digunakan adalah Hukum Tegangan Kirchoff dengan persamaan,
L^ + Ri(t) + Keω(t) = υ(t) (1)
Persamaan (1) diubah ke domain frekuensi menggunakan transformasi Laplace menjadi:
Ra= resistor,ohm
La= induktansi, Henry
ia= arus, ampere
ea= tegangan listrik yg diberikan, volt
eb= feedback tegangan listrik, volt
T= torsi motor, N-m
J= momen inersia motor, kg-m2
f= koefisien viskos motor dan muatan, N-/rad/s
Persamaan (5) adalah model matematika yang dimasukan kedalam transfer function dc motor yang akan menggerakan semua link pada jari. Model matematika diaplikasikan kedalam block Simulink seperti yang ditunjukan pada gambar 5.
(2)
(a)

Gambar 7. Eksperimen prosthetis lengan
(b)
(c)
I
Gambar 6. Pemodelan Sistem Kontrol Block Simulink Transfer Function DC Motor (a) nilai parameter pada persamaan model matematika DC Motor (b) Pemodelan Block Transfer Function DC Motor (c) Pemodelan Sistem Kontrol
-
2.4 Tuning dan Robust Control
Kontrol tangan robot bertanggung jawab untuk memastikan yang digenggam tangan dengan kuat dan jari yang sesuai di hadapan kekuatan eksternal yang diterapkan pada objek [21]. Tuning PID adalah proses mengatur parameter kontroler PID (Proporsional-Integral-Derivatif) agar dapat bekerja dengan baik pada sistem kontrol pada prosthesis lengan yang diinginkan.
Untuk mencapai hasil yang optimal, tuning PID dan robust control seringkali dilakukan bersama-sama. Dengan menggunakan teknik tuning PID yang tepat, sistem kontrol dapat dioptimalkan agar dapat bekerja dengan baik pada kondisi normal. Selain itu, dengan menggunakan teknik robust control, sistem kontrol juga dapat dioptimalkan agar dapat bekerja dengan baik pada kondisi yang tidak normal atau tidak terduga. Robust control biasanya digunakan pada sistem yang memiliki parameter yang tidak pasti atau bervariasi, sehingga dapat menangani perubahan-perubahan tersebut dengan baik.
-
III. HASIL DAN PEMBAHASAN
-
3.1 Hasil
-
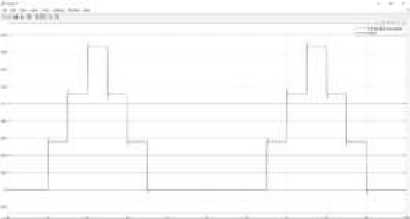
Analisis sistem kontrol dari prosthesis lengan dilakukan dengan MATLAB software Simulink Simscape Multibody. Untuk mengamati respon system, sinyal input yang telah diberikan kepada sistem dalam keadaan open-loop, yang mana
(a)
(b)
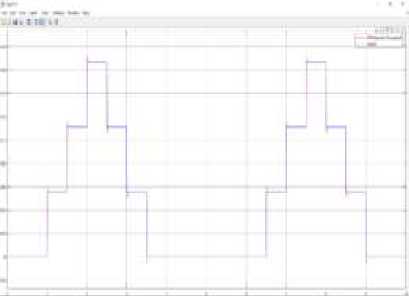
Gambar 8. Perbandingan Respon Sistem Kontrol dan Sinyal Input (a) Joint ujung jari (b) Joint bagian Tengah Jari (c) Joint Pangkal Jari.
Majalah Ilmiah Teknologi Elektro, Vol.22, No.2, Juli-Desember 2023 DOI: https://doi.org/10.24843/MITE.2023.v22i02.P02 nantinya akan diimplementasikan dalam sistem kontrol close loop. Parameter sistem kontrol pertama-tama diperoleh menggunakan metode auto-tuning. Kemudian parameter yang diperoleh akan digunakan sebagai nilai awal dalam metode optimalisasi penurunan gradien. Pada Gambar 7 diperoleh hasil perbandingan respon sistem kontrol yang berupa garis yang berwarna merah dengan signal input yang berupa garis yang berwarna biru.
A. Hasil PID
Tuning PID adalah proses mengoptimalkan parameter kontroler PID (Proporsional-Integral-Derivatif) agar sistem yang dikontrol dapat beroperasi dengan baik dan sesuai dengan spesifikasi yang diinginkan. Pada tuning desain prosthesis lengan ini diperoleh nilai kontrol parameter PID sebagai berikut.
Gambar 9. Proses Tuning PID
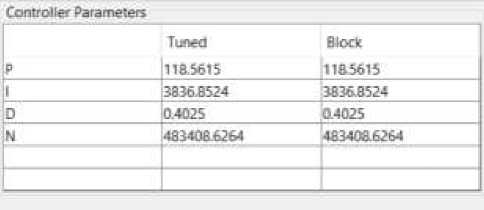
Gambar 9. Nilai Masing-Masing PID Setelah Tuning
-
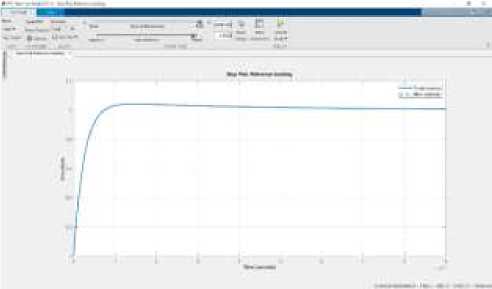
B. Performa dan Robustness
Performa dari sistem kontrol dengan PID yang sudah di tuning dapat dilihat melalui simulasi visual pada Gambar 10. Dalam simulasinya, jari akan bergerak sesuai dengan sinyal input dengan kekokohan atau robustness yang telah disesuaikan melalui tuning PID.
Performance and Robustness
|
Rrse ι me |
Tuned 0.000451 seconds |
Block 0.000451 seconds |
|
Scttlino time |
0.00456 seconds |
0.00436 seconds |
|
Orershoot |
4.12% |
4.12% |
|
Peak |
1.04 |
1.04 |
|
Gain margin |
Int dB © Inf rad/s |
Inf dB © Inf rad/s |
|
Pnasemargin |
86.4 deg β<2Je+O3u |
66,4 deg ® 423e∙03 r_ |
|
Ctosed-Ioop stability |
Stable |
Stable |
Gambar 11. Performa Rise Time, Settling Time, dan Overshoot Sistem
Kontrol.
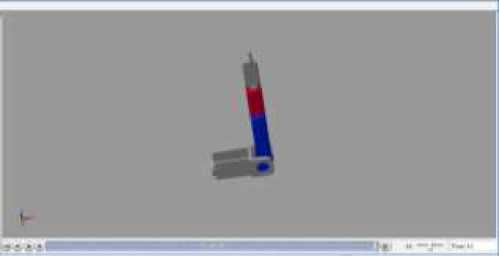
Gambar 10. Simulasi Visual Pergerakan Simscape Multibody dari
Assembly Jari
Berdasarkan hasil tuning PID yang dilakukan pada salah satu assembly jari dengan tiga jumlah joint memperoleh rise time 0,00431 detik, settling time 0.026 detik, dan overshoot sebesar 4,76%. Berarti, performa terbaik yang dapat dilakukan oleh sistem kontrol terhadap jari prosthesis lengan karena semakin kecil nilai dari rise time, settling time dan overshoot yang terjadi pada suatu sistem kontrol, semakin stabil dan semakin cepat respon dari input yang diberikan. Tingkat kekokohan atau robustness juga mempengaruhi ketiga performa dan nilai PID sistem kontrol dimana dibutuhkan kekokohan yang tepat agar pergerakan jari prosthetis sesuai dengan keinginan karna semakin tinggi tingkat kekokohan semakin kecil nilai rise time, settling time, dan overshoot yang diperoleh.
Hasil dari penerapan sistem kontrol PID pada prosthesis lengan dengan menggunakan Simulink simscape Multibody dapat meningkatkan kinerja gerakan robot tangan dengan overshoot sebesar 4,76%, rise time sebesar 0,00431 detik, settling time sebesar 0,026 detik. Peningkatan kinerja Gerakan robot berpengaruh terhadap kekokohoan dari prosthesis tangan.
Untuk mendapatkan hasil simulasi sistem kontrol yang lebih terperinci dan baik dengan MATLAB Simscape Multibody diharapkan untuk penelitian selanjutnya menggunakan perangkat hardware yang lebih memadai agar mampu mengimport assembly dari Autoodesk Inventor ke format file MATLAB yaitu xml karena perangkat yang digunakan oleh penulis paper ini mengalami berbagai kendala dalam proses tersebut. Perlu diadakan penelitian perhitungan lanjut untuk performa sistem prosthetis lengan yang lebih baik serta model ini dapat dijadikan acuan dalam melakukan penelitian pengembangan prosthetis lengan selanjutnya
Ucapan Terima Kasih
Penulis pada kesempatan ini mengucapkan terimakasih kepada semua pihak yang telah membantu baik berupa materi maupun pikiran sehingga penelitian dan paper ini dapat terselesaikan. Yang kedua penulis mengucapkan terimakasih kepada Kemenristekdikti atas bantuan dana penelitian melalui program MBKM penelitian hibah internal 2022 yang dibiayai melalui LPPM Universitas Udayana. Yang ke lima penulis mengapresiasi Jurusan Teknik Mesin Universitas Udayana Dan mitra Puspadi Bali atas fasilitas yang dipergunakan dalam penelitian ini.
Referensi
-
[1] WHO, “Global report on health equity for persons with disabilities,”
2022. https://www.who.int/news-room/fact-sheets/detail/disability-and-health (accessed Dec. 11, 2022).
-
[2] S. S. Noland, A. T. Bishop, R. J. Spinner, and A. Y. Shin, “Adult
Traumatic Brachial Plexus Injuries,” Journal of the American Academy of Orthopaedic Surgeons, vol. 27, no. 19. 2019. doi: 10.5435/JAAOS-D-18-00433.
-
[3] I. Vujaklija, D. Farina, and O. C. Aszmann, “New developments in
prosthetic arm systems,” Orthopedic Research and Reviews, vol. 8. Dove Medical Press Ltd., pp. 31–39, Jul. 07, 2016. doi:
10.2147/ORR.S71468.
-
[4] I. A. Satam and I. A. Satam, “Review Studying of the Latest
Development of Prosthetic Limbs Technologies,” Int J Sci Eng Res, vol. 12, 2021, [Online]. Available: http://www.ijser.org
-
[5] L. A. Miller et al., “Control of a Six Degree of Freedom Prosthetic
Arm After Targeted Muscle Reinnervation Surgery,” Arch Phys Med Rehabil, vol. 89, no. 11, pp. 2057–2065, Nov. 2008, doi: 10.1016/J.APMR.2008.05.016.
-
[6] A. Kelleher, B. Dicianno, S. Eckstein, R. Schein, J. Pearlman, and R.
Cooper, “Consumer Feedback to Steer the Future of Assistive Technology Research and Development: A Pilot Study,” Top Spinal Cord Inj Rehabil, vol. 23, pp. 89–97, Feb. 2017, doi:
10.1310/sci2302-89.
-
[7] M. S. Widodo and W. Jatmiko, “Design of prosthesis arm control
based on microcontroller,” J Phys Conf Ser, vol. 1363, 2019.
-
[8] M. S. Al-Smadi and S. Y. Ababneh, “Real-time model reference
adaptive control for upper-limb prosthetic device.,” Appl Bionics Biomech, 2019.
-
[9] Laure Anne Pessina, “A prosthetic that restores the sense of where
your hand is,” Jun. 04, 2019.
wevolver.com/article/a.prosthetic.that.restores.the.sense.of.where.y our.hand.is (accessed Jan. 08, 2023).
-
[10] T. M. Wang, “The application of DC motor control on the robotic
arm.,” In Proceedings of the 11th International Conference on Electrical and Electronics Engineering (ICEEE), 2017.
-
[11] J. A. Lie, T. D. Wulandari, and H. Kurniawan, “Tuning PID dan
Robust Control pada Sistem Kontrol Gerakan Prosthesis Lengan Berbasis Motor DC.,” Jurnal Pendidikan Vokasi, vol. 8(3), 2018.
-
[12] B. Harsono, A. Setiyawan, and M. Rifa’i, “Pengontrolan Prosthesis
Lengan dengan Metode Kontrol Adaptif dan PID.,” Jurnal Nasional Teknik Elektro dan Teknologi Informasi, vol. 8(2), 2019.
-
[13] M. A. Al-Faaham, M. A. Al-Dabbas, and M. Al-Rousan,
“Performance Enhancement of Upper-Limb Prosthetic Control Using Robust Control.,” SN Comput Sci, vol. 1(5), 2020.
-
[14] D. Suryadi, M. Ardiansyah, and Y. Khairi, “Robust control method
to improve the performance of an upper-limb prosthetic.,” International Seminar on Application for Technology of Information and Communication, 2019.
-
[15] B. Neogi, S. K. S. Islam, P. Chakraborty, S. Barui, and A. Das,
“Introducing MIT rule toward improvement of adaptive mechanical prosthetic arm control model,” in Advances in Intelligent Systems and Computing, 2018, vol. 518, pp. 379–388. doi: 10.1007/978-981-10-3373-5_38.
-
[16] J. Zhang, M. Zhang, W. Shi, and Y. Gu, “Robust Control of an Upper
Limb Prosthesis Using an Interval Model.,” IEEE Access, vol. 8, 2020.
-
[17] G. Dewantoro, D. Susilo, and P. Pideksa Adi, “Implementasi
Pengendali Logika Fuzzy pada Navigasi Robot Penjejak Dinding,” Teknologi Elektro, vol. 16, no. 02, 2017.
-
[18] Komponen, “Teori Motor Dc dan Jenis-Jenis Motor DC,” Teori
Elektronika, 2022. Teori Motor DC Dan Jenis-Jenis Motor DC Read more at: http://elektronika-dasar.web.id/teori-motor-dc-dan-jenis-jenis-motor-dc/ Copyright © Elektronika Dasar
-
[19] M. A. Alharbi, H. A. Al-Mashary, and A. Y. Al-Nasheri, “High-
Performance Speed Control of a DC Motor Based on PI Control.,” Journal of Control, Automation and Electrical Systems, vol. 32(2), 221-232), 2021.
-
[20] A. N. Aliansyah, N. Nurhayati, S. N. Jaya`, L. Pagiling, W. O. S. N.
Alam, and M. N. A. Nur, “Analisis Tuning Parameter PID Menggunakan Algoritma Genetika pada Pengontrolan Kecepatan Motor DC,” Majalah Ilmiah Teknologi Elektro, vol. 21, no. 2, p. 287, Dec. 2022, doi: 10.24843/mite.2022.v21i02.p17.
-
[21] W. Widhiada, T. G. T. Nindhia, and N. Budiarsa, “Robust Control
for the Motion Five Fingered Robot Gripper,” Int. J. Mech. Eng. Robot. Res., vol. 4, no. 3, pp. 226-232, 2015.
ISSN 1693 – 2951
Karuna K.S Prasad: Optimasi Performansi Sistem Kontrol…
Discussion and feedback