Alat Pemberi Pakan Ikan Lele Dalam Drum Otomatis Berdasarkan Usia dan Jumlah Ikan Dengan Metode Fuzzy Logic
on
Majalah Ilmiah Teknologi Elektro, Vol.22, No.1, Jan-Juni 2023
DOI: https://doi.org/10.24843/ MITE.2023.v22i01.P03 19
Alat Pemberi Pakan Ikan Lele Dalam Drum Otomatis
Berdasarkan Usia dan Jumlah Ikan Dengan Metode Fuzzy Logic
Setia Yusuful Arif1, Niam Tamami2, Madyono3
[Submission: 09-12-2022, Accepted: 14-01-2023]
Abstract— The trend for consumption fish consumption continues to increase rapidly, even the Food and Agriculture Organization (FAO), says fish cultivation output is expected to increase by around 172 million tonnes in 2021. Therefore efforts are needed to increase national catfish production. New methods of cultivating catfish have emerged, one of which is the method of cultivating catfish in drums. However, there are still many catfish breeders in drums in Indonesia who still use conventional methods which are no longer effective, because many catfish seeds die before maturity, this is due, among other things, to unscheduled feeding and the amount of feed weight that is inaccurate with the amount and the age of the fish in a drum which causes the growth of catfish to be less than optimal. Based on these problems, it is encouraging to develop a tool that can control and monitor fish feeding schedules and the total weight of fish feed according to the number and age of fish in one drum based on a microcontroller by utilizing the fuzzy logic method which can facilitate the process of reasoning in language. (linguistic reasoning), and only by means of a smartphone, farmers can set feeding schedules and choose the number of fish and the age of the fish in a drum. The result is that the tool is able to provide feed according to the feed schedule with an error rate of 0%, and the tool can provide feed according to the feed dosage with an accuracy of up to 98.9% with an average accuracy of 96.09%.
Keywords— Automatic Fish Feeder; MQTT dashboard; Fuzzy Logic
Intisari— Tren permintaan ikan konsumsi terus meningkat pesat, bahkan Food and Agriculture Organization (FAO), mengatakan hasil budidaya ikan diperkirakan akan meningkat sekitar 172 juta ton pada tahun 2021. Oleh karena itu dibutuhkan usaha-usaha untuk meningkatkan produksi ikan lele nasional. Metode-metode terbaru dalam budidaya ikan lele pun bermunculan, salah satunya adalah metode budidaya ikan lele dalam drum. Namun, masih banyak peternak ikan lele dalam drum di Indonesia masih menggunakan metode konvensional yang sudah tidak efektif lagi, dikarenakan banyak benih ikan lele yang mati sebelum dewasa, hal ini disebabkan diantaranya karena pemberian pakan yang kurang terjadwal serta jumlah berat pakan yang kurang akurat dengan jumlah dan usia ikan dalam sebuah drum yang menyebabkan pertumbuhan ikan lele menjadi kurang maksimal. Berdasarkan permasalahan-
permasalahan itulah yang mendorong untuk mengembangkan sebuah alat yang dapat mengontrol dan monitor jadwal pemberian pakan ikan dan jumlah berat takaran pakan ikan sesuai dengan jumlah dan usia ikan dalam satu drum berbasis mikrokontroler dengan memanfaatkan metode fuzzy logic yang dapat memudahkan dalam proses penalaran secara bahasa (linguistic reasoning),dan hanya dengan melalui smartphone, peternak dapat mengatur jadwal pemberian pakan serta memilih jumlah ikan dan usia ikan yang ada dalam sebuah drum. Hasilnya alat mampu memberikan pakan sesuai dengan jadwal pakan dengan tingkat error 0%, serta alat dapat memberikan pakan sesuai dengan takaran pakan dengan keakuratan mencapai 98,9% dengan rata-rata akurasi 96,09%
Kata Kunci— Pakan ikan otomatis; MQTT dashboard; Fuzzy Logic
Berdasarkan data Kementerian Kelautan dan Perikanan produksi ikan nasional tumbuh sebesar 879.000 ton dari tahun 2015-2018. Perikanan budidaya merupakan salah satu sektor yang mengalami pertumbuhan produksi lebih besar.
Pertumbuhan perikanan budidaya mengalami pertumbuhan sebesar 29,29% dari tahun 2017-2018 [7]. Selain
perkembangan produksi ikan lele yang terus meningkat, metode-metode baru mengenai cara pengembangbiakan ikan lele banyak bermunculan, salah satunya adalah metode beternak lele dalam drum. Metode ini memiliki beberapa kelebihan, beberapa diantaranya adalah harga yang relatif murah dikarenakan cara budidayanya yang cukup mudah, tidak memerlukan tempat yang luas, media yang mudah dipindahkan, dan dapat ditambah jika usaha telah meningkat [1]. Namun masih banyak peternak lele dalam drum masih menggunakan cara konvensional dalam pemberian pakan ikan lele, hal ini menyebabkan pertumbuhan ikan lele menjadi kurang maksimal dikarenakan waktu makan ikan yang tidak terjadwal dan tidak sesuainya takaran pakan ikan yang diberikan dengan jumlah serta usia ikan, selain itu biaya pakan menjadi salah satu permasalahan terbesar dalam budidaya ikan lele, meningkat sebesar lebih dari 60% selama tahun 2007-2012. Oleh karena itu, takaran pemberian pakan yang sesuai dengan jumlah ikan dalam drum, serta pemberian pakan ikan yang telah terjadwal mempunyai pengaruh besar dalam suksesnya budidaya ikan lele dan itu berbanding lurus dengan biaya yang telah dikeluarkan untuk budidaya ikan lele dalam drum [1].
Maka dari itu, pada penelitian ini bertujuan untuk membantu peternak ikan lele dalam drum untuk memaksimalkan potensi yang dimiliki agar meraih hasil yang maksimal dengan
membuat sebuah teknologi yang dapat mengontrol dan monitor jadwal pemberian pakan ikan dan jumlah berat takaran pakan ikan sesuai dengan jumlah serta usia ikan dalam satu drum berbasis mikrokontroler dengan memanfaatkan metode fuzzy logic yang dapat memudahkan dalam proses penalaran secara bahasa (linguistic reasoning), sehingga dalam perancangannya tidak perlu lagi persamaan matematik dari objek yang dikendalikan [2], [14], [17]. Pengembangan IoT pada alat ini juga diterapkan sehingga hanya dengan melalui smartphone, peternak dapat mengatur jadwal pemberian pakan serta memilih jumlah ikan yang ada dalam sebuah drum.
-
II. STUDI PUSTAKA
-
A. Pedoman Pemberian Pakan
Pedoman pemberian pakan berikut diambil dari Dinas Kelautan dan Perikanan Kabupaten Pamekasan. Rincian dari pedoman pemberian pakan ikan lele dapat dilihat pada tabel dibawah ini [5] :
TABEL I
Pedoman Pemberian Pakan Ikan Lele
|
Umur (Hari) |
Berat Badan (gram/ekor) |
Panjang (cm) |
Konsumsi Pakan (%BB) |
Frekuensi Pemberian (x/hr) |
|
1-10 |
<1 |
<3 |
>10 |
4 – 3 |
|
10-20 |
1-2 |
3 – 5 |
10 – 8 |
3 |
|
20-40 |
2 - 3,5 |
7 – 10 |
8 – 6 |
3 |
|
40-50 |
3,5 – 5 |
10 – 12 |
6 – 5 |
3 – 2 |
|
50-60 |
5 – 20 |
12 – 15 |
5 – 4,5 |
3 – 2 |
|
60-70 |
20 – 50 |
15 – 18 |
4,5 – 4 |
3 – 2 |
|
70-80 |
50 – 80 |
18 – 20 |
4 – 3 |
2 |
|
80 120 |
80 – 100 |
20 – 25 |
3 – 2 |
2 |
|
>120 |
>100 |
25 – 30 |
2 |
2 |
-
B. Fuzzy Logic
Fuzzy logic adalah suatu cabang ilmu Artificial Intellegence, yaitu suatu pengetahuan yang membuat komputer dapat meniru kecerdasan manusia sehingga diharapkan komputer dapat melakukan hal-hal yang apabila dikerjakan manusia memerlukan kecerdasan. Dengan kata lain fuzzy logic mempunyai fungsi untuk meniru kecerdasan yang dimiliki manusia untuk melakukan sesuatu dan mengimplementasikannya ke suatu perangkat [2], [12], [14], [18].
Terdapat beberapa tahapan dalam penerapan fuzzy logic yaitu Fuzzyfication, Rule Evaluation (Rule-Base & Inferensi Fuzzy) dan Defuzzyfication.
Tahap Fuzzification bertujuan untuk memproses crisp input (disebut juga Liguistic Variabel) menjadi Fuzzy input dalam bentuk linguistic value pada fuzzy Set. Fuzzy Set adalah kumpulan linguistic value yang melingkupi semesta pembicaraan dari Lingustic Variabel. Linguistic value merupakan membership function yang dapat berbentuk fungsi trapezoidal, triangular atau gaussian. Gambar 1 memperlihatkan membership function triagular pada proses fuzzyfication bertujuan untuk memetakan semesta pembicaraan x kedalam interval [0,1] dengan persamaan yang terdapat pada sebelah gambar.
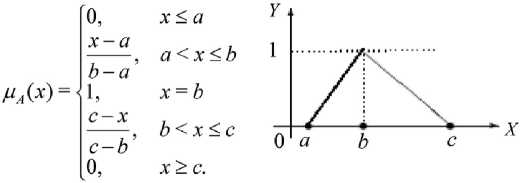
Gambar 1 Triangular Membership Function dan Persamaannya
Tahap berikutnya Rule Evaluation, akan dilakukan proses penerapan fuzzy input terhadap rule base yang merupakan representasi pengetahuan yang digunakan dalam bentuk logika ‘IF-THEN’. Untuk menentukan jumlah Rule Base yang digunakan, dapat digunakan persamaan sebagai berikut :
nRule = Zv
Pada persamaan diatas dimana : Z dinyatakan sebagai jumlah Linguistic Value, dan v dinyatakan sebagai jumlah Linguistic Variable. Operasi Fuzzy Input pada setiap rule yang digunakan akan menghasilkan implikasi tertentu yang selanjutnya akan dilakukan proses agregasi untuk mendapatkan fuzzy output.
Tahapan terakhir adalah defuzzification. Dalam defuzzificationi, Fuzzy output yang didapat dari proses agregasi akan diubah kembali menjadi nilai crisp. Salah satu teknik yang sering digunakan adalah metode Centre of Gravity (COG). Yang dinyatakan dalam persamaan dibawah ini :
_ ∑^=1xiuxi
^c = yn H
∑t=ι uxi
Pada persamaan diatas, Zc adalah nilai COG, X1 adalah nilai x pada output fuzzy hasil agregasi dan uXl adalah derajat keanggotaan dari x pada output fuzzy hasil agregasi, dan n adalah jumlah sampling data yang digunakan [8],[13].
-
C. Intrnet of Things
Menurut Harika Devi Kotha dan V Mnssvkr Gupta dalam jurnal internasionalnya yang berjudul (IoT Application, A Survey), aplikasi IoT berisi perangkat keras dan perangkat lunak. IoT perangkat keras secara luas diklasifikasikan menjadi [4] :
-
a. Wearable devices,
-
b. Embedded system.
Cakupan wearable devices terbatas pada aplikasi tertentu. Misalnya sebuah smart watch yang hanya dirancang untuk menerima panggilan dan pemantauan kebugaran saja. Keuntungan dari wearable devices adalah praktis untuk digunakan. Di sisi lain, embedded system boards terbuka untuk pengguna. Artinya, pengguna dapat memprogram boards ini pada aplikasi yang dia inginkan. Saat ini, ada banyak sekali embedded system boards yang tersedia, contohnya termasuk Arduino, raspberry pi, cloudbit, modul Wi-Fi ESP8866, dan lainnya. Setelah memilih apapan sistem tertanam tertentu, pengguna harus memilih aplikasi piranti lunak. Ada berbagai macam program bahasa seperti C, C ++, python dan lainnya [4], [10], [11],[15],[16].
-
D. Motor Servo
Motor servo adalah aktuator putar dengan kontrol umpan balik loop tertutup. Motor ini dapat disesuaikan untuk
Majalah Ilmiah Teknologi Elektro, Vol.22, No.1, Jan-Juni 2023 DOI: https://doi.org/10.24843/ MITE.2023.v22i01.P03 menentukan dan mengamankan posisi sudut poros keluaran. Motor servo terdiri dari motor DC, serangkaian gearbox yang terpasang pada poros motor DC yang meningkatkan torsi motor servo. Potensiometer, yang resistansinya berubah saat motor bergerak, membantu untuk menentukan batas posisi rotasi poros motor servo [9], [19], [20], [21].
Tahap pelaksanaan yang digunakan untuk menunjang keberhasilan dari penelitian ini adalah sebagai berikut:
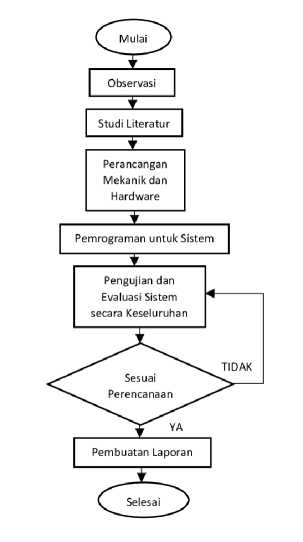
Gambar 2: Metodelogi Penelitian
-
A. Studi Literatur
Studi literatur yang dilakukan adalah dengan cara pencarian informasi melalui buku, jurnal ilmiah, dan informasi di internet yang berkaitan dengan sistem yang akan dibuat untuk dijadikan dasar teori. Sumber yang dirangkum berasal dari dalam negeri dan luar negeri guna mendapatkan hasil yang valid.
-
B. Diagram Blok dan Flowchart
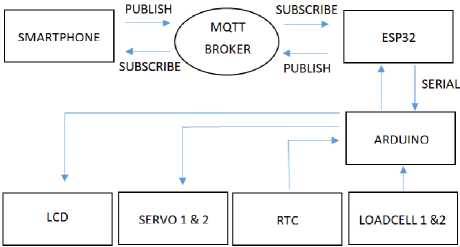
Gambar 3: Diagram Blok Sistem
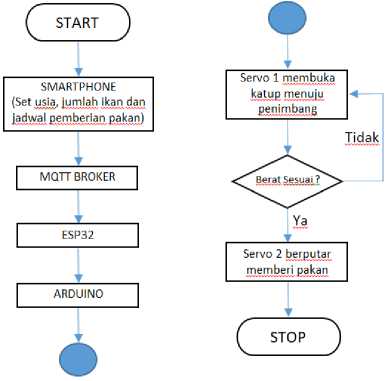
Gambar 4: Flowchart Sistem
Dari diagram blok dan flowchart diatas dapat diketahui cara kerja dari sistem tersebut. Pertama peternak akan mengatur usia, jumlah ikan, dan jadwal pemberian pakan melalui smartphone. Setelah peternak selesai mengatur, maka sistem akan melakukan publish perintah dari smartphone ke MQTT broker. Selanjutnya ESP32 akan melakukan subscribe ke MQTT broker untuk mendapatkan perintah tersebut dan mengirimkan hasil subscribe yang berupa perintah tersebut ke Arduino. Kemudian proses penyesuaian settingan terhadap usia dan jumlah ikan lele akan diproses oleh Arduino dan menggunakan metode fuzzy logic. Setelah didapatkan info tersebut dan saat waktu pemberian pakan telah sesuai dengan jadwal yang telah ditentukan, maka motor servo1 akan membuka katup menuju timbangan yang menggunakan sensor loadcell dan saat berat pakan telah sesuai maka servo2 akan berputar untuk memberi pakan.
-
C. Perancangan Hardware
-
1) Perakitan Komunikasi Serial ESP32 ke Arduino Uno
Pada sistem ini, ESP32 dimanfaatkan sebagai penghubung antara Arduino Uno dengan sistem IoT yang menggunakan aplikasi MQTT dashboard. Maka dari itu diperlukannya hubungan serial antara Arduino Uno dengan
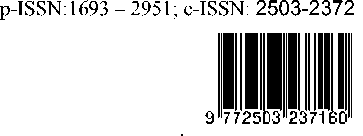
ESP32. Berikut merupakan gambar perakitan komunikasi serial antara Arduino Uno dengan ESP32.
Gambar 5: Perakitan Komunikasi Serial Arduino Uno dengan ESP32
-
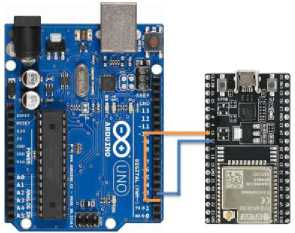
2) Perakitan Loadcell & Modul Amplifier HX711 dengan Arduino Uno
Fungsi dari LCD 16x2 disini adalah sebagai penampil keluaran sistem, seperti pemberitahuan saat tiba waktu pakan serta berat pakan yang akan diberikan. Perakitan sensor loadcell dengan Arduino Uno dapat dilihat pada gambar dibawah ini.
Gambar 6: Perakitan Loadcell dengan Arduino Uno
3) Perakitan Servo MG995 dengan Arduino Uno
Fungsi servo pada sistem ini adalah sebagai motor untuk membuka dan menutup katup. Pada saat sistem memasuki waktu makan servo1 akan membuka katup1 yang mana pakan akan mengarah ke katup2 sebagai pengukur takaran hingga takaran yang diinginkan terpenuhi, saat telah terpenuhi maka servo2 akan membuka katup2 untuk memberi pakan kepada ikan. Perakitan servo dengan Arduino Uno dapat dilihat pada gambar dibawah ini.

Gambar 7: Perakitan Servo dengan Arduino Uno
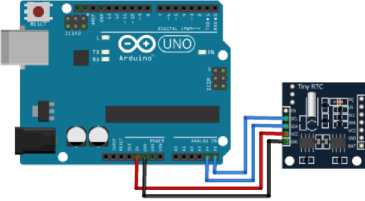
Gambar 8: Perakitan Modul RTC dengan Arduino Uno
-
5) Perakitan LCD 16x2 dengan Arduino
Fungsi LCD pada sistem ini adalah sebagai pemberi informasi yang dapat menampilkan pemberitahuan saatnya pemberian pakan, berat pakan yang diberikan, maupun lamanya sistem telah berjalan. Perakitan modul RTC DS1307 dengan Arduino dapat dilihat pada gambar dibawah ini.
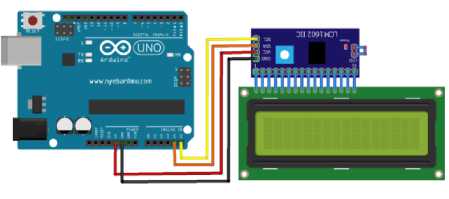
Gambar 9: Perakitan LCD 16x2 dengan Arduino Uno
6) Integrasi Hardware

Gambar 10: Hardware yang telah terintegrasi
Hardware diatas merupakan integrasi dari tiap-tiap komponen dari poin sebelumnya yang disuplai oleh power supply 12v 3A, dan ditambahkan dengan modul dc-dc step down mp2307, serta beberapa komponen penunjang lainnya.
-
D. Pemrograman Sistem
Software yang digunakan untuk memprogram sistem adalah Arduino IDE. Kode program yang dibuat sesuai dengan rancangan flowchart sebelumnya. Setelah kode program selesai, lalu diupload ke board ESP32 dan juga Arduino Uno. Berikut adalah rancangan software dari alat-alat yang dibuat.
-
4) Perakitan RTC dengan Arduino Uno
Fungsi RTC pada sistem ini adalah sebagai referensi waktu yang nantinya akan digunakan sebagai parameter waktu pakan. Perakitan modul RTC DS1307 dengan Arduino dapat dilihat pada gambar dibawah ini.
ISSN 1693 – 2951
Majalah Ilmiah Teknologi Elektro, Vol.22, No.1, Jan-Juni 2023 DOI: https://doi.org/10.24843/ MITE.2023.v22i01.P03

Gambar 11: Tampilan Program pada Arduino IDE
Input usia ikan dibuat berdasarkan referensi tabel pedoman pakan ikan lele, dikarenakan usia ikan lele yang digunakan pada proyek akhir ini diatas 20 hari, maka membership function yang digunakan antara umur 20 hari hingga 120 hari, dan dibagi menjadi 6 bagian, yaitu : Sangat Muda, Muda, Agak Muda, Agak Tua, Tua, dan Sangat Tua.
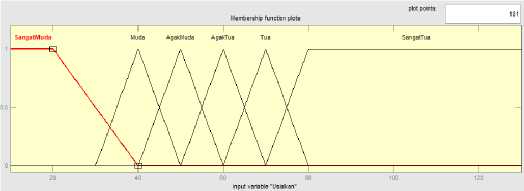
Gambar 13: Membership Function input usia ikan
-
E. Perancangan Software Sistem MQTT
MQTT adalah sebuah protocol konektifitas machine to machine (M2M) yang didesain mampu mengirimkan data dengan sangat ringan menggunakan arsitektur TCP/IP. Pada MQTT sendiri mempunyai keunggulan yaitu dapat mengirimkan data dengan bandwith yang ringan, konsumsi listrik yang sedikit, latensi serta konektifitas yang sangat tinggi, ketersediaan variabel yang banyak serta jaminan pengiriman data yang dapat dinegosiasikan. Pada sistem ini memanfaatkan aplikasi MQTT dashboard yang terdapat pada android.

Gambar 12: Tampilan pada aplikasi MQTT dashboard
Pada tampilan tersebut terdapat tiga buah informasi, dua diantaranya merupakan komunikasi dua arah, yakni usia ikan dan jumlah ikan, sedangkan untuk sisa pakan, pengguna hanya dapat melihat informasi yang ada dan tidak bisa mengaturnya
Sedangkan pada membership function input jumlah ikan, dibuat berdasarkan batasan jumlah ikan yang bisa ditampung pada satu drum dan dibagi menjadi 3 bagian, yaitu : Sedikit, Sedang, dan Banyak.
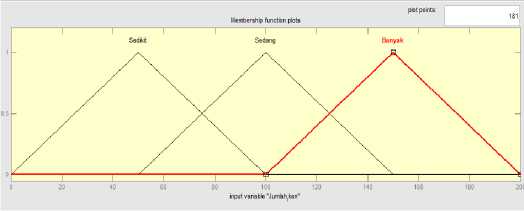
Gambar 14: Membership Function input jumlah ikan
-
2) Output Fuzzy Logic
Pada membership function output berat pakan, dibuat berdasarkan jumlah berat pakan maksimal yang bisa diberikan kepada ikan lele berdasarkan tabel dan juga jumlah yang terkecil lalu dibagi menjadi 7 bagian, yaitu : Sangat Ringan, Ringan, Agak Ringan, Pertengahan, Agak Berat, Berat, dan Sangat Berat.
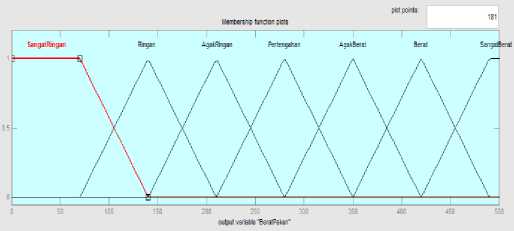
Gambar 15: Membership Function output berat pakan
-
F. Perancangan Fuzzy Logic
-
1) Input Fuzzy Logic
3) Rule Fuzzy Logic
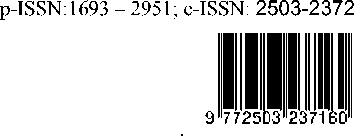
Rule pada Fuzzy Logic dibuat berdasarkan perpaduan dan kecocokan antara usia dan jumlah ikan dengan berat pakan. Terdapat 18 rule dalam system ini.
Gambar 16: Rule Fuzzy Logic
-
IV. HASIL DAN PEMBAHASAN
-
A. Realisasi dan Implementasi Hasil Integrasi Mekanik,
Hardware, dan Software
Rangka ini terbuat dari rangka besi dengan ketebalan plat 1mm dan kuat untuk menahan beban hingga 10Kg. Realisasi alat pemberi pakan ikan lele dalam drum otomatis dapat dilihat pada gambar dibawah ini.

Gambar 17: Hasil realisasi dan implementasi sistem
Pada alat ini,terdapat dua buah katup yang memiliki fungsi yang berbeda. Pada katup pertama tutup katup terbuat dari akrilik dengan ketebalan 3mm yang disangga oleh besi dan digerakkan oleh motor servo, serta pada katup pertama terdapat sebuah sensor loadcell yang berfungsi sebagai pendeteksi jumlah pakan sisa yang ada dalam wadah drum.

Gambar 18: Katup pertama
Sedangkan pada katup kedua sensor loadcell berfungsi sebagai penakar jumlah pakan yang nantinya akan diberikan kepada ikan lele.

Gambar 19: Katup kedua
-
B. Pengujian Sensor Loadcell 20kg dan 5kg
Pengujian ini bertujuan untuk menguji ketepatan sensor loadcell dalam mendeteksi berat suatu benda. Pada pengujian kali ini dilakukan dengan menggunakan 10 benda berbeda per loadcellnya. Hasil dari pengujian ini akan dibandingkan dengan data dari timbangan digital Benz BZ 030 lalu akan dihitung persen erornya.
TABEL III
Data Pengujian Sensor Loadcell 5kg
|
Benda Ke |
Pembacaan Data |
Error (%) | |
|
Loadcell 5kg (gr) |
Benz BZ 030 (gr) | ||
|
1 |
185,8 |
186 |
0.107 |
|
2 |
245,8 |
247 |
0.485 |
|
3 |
634,6 |
636 |
0.22 |
|
4 |
992,2 |
994 |
0.181 |
|
5 |
1.604,7 |
1.607 |
0.143 |
|
6 |
1.369,8 |
1.371 |
0.087 |
|
7 |
2.188,2 |
2.191 |
0.127 |
|
8 |
3.541,3 |
3.544 |
0.076 |
|
9 |
4.197,9 |
4.211 |
0.311 |
|
10 |
4.383,1 |
4.386 |
0.066 |
Majalah Ilmiah Teknologi Elektro, Vol.22, No.1, Jan-Juni 2023 DOI: https://doi.org/10.24843/ MITE.2023.v22i01.P03
TABEL IIIII
DATA PENGUJIAN SENSOR LOADCELL 20KG
|
5 |
67 |
143 |
67 |
143 |
Berhasil |
|
Benda Ke |
Pembacaan Data |
Error (%) | |
|
Loadcell 20kg (gr) |
Benz BZ 030 (gr) | ||
|
1 |
1.372,6 |
1.370 |
0.189 |
|
2 |
2.193,2 |
2.192 |
0.054 |
|
3 |
3.544 |
3.541 |
0.084 |
|
4 |
4.226,9 |
4.223 |
0.092 |
|
5 |
4.401,2 |
4.398 |
0.072 |
|
6 |
6.390,8 |
6.385 |
0.09 |
|
7 |
8.799,1 |
8.793 |
0.069 |
|
8 |
12.539,8 |
12.532 |
0.062 |
|
9 |
10.772,4 |
10.768 |
0.04 |
|
10 |
13.663,6 |
13.657 |
0.048 |

Gambar 20: Tampilan LCD saat menerima data baru
Dari 5 kali pengujian pengiriman set usia ikan dan set jumlah ikan, dapat diketahui bahwasannya nilai yang dikirim dari aplikasi MQTT dashboard ke sistem bernilai sama, tingkat keberhasilan dari pengujian ini sebesar 100%.
-
D. Pengujian Keakuratan Waktu Pemberian Pakan
Pengujian ini bertujuan untuk mengetahui apakah waktu pakan yang telah diatur pada pukul 06.01 dan 18.01 berjalan sesuai dengan perintah. Pengujian dilakukan selama 4 minggu dan usia ikan lele yang digunakan mulai dari 23 hari sebanyak 100 ekor. Berikut merupakan tabel hasil pengujiannya.
Dari pengujian pada 10 benda yang berbeda, sensor loadcell 5kg memiliki tingkat akurasi mencapai 99,94% dengan rata-rata akurasi 99,82%, sedangkan pada sensor loadcell 20kg memiliki tingkat akurasi mencapai 99,96% dengan rata-rata akurasi 99,92%, jika dibandingkan nilai yang diambil melalui timbangan digital Benz BZ 030.
C. Pengujian Komunikasi MQTT dashboard dengan Sistem
Pengujian komunikasi ini bertujuan untuk mengetahui apakah aplikasi MQTT dashboard dapat mengirimkan data dan sistem dapat menerimanya. Jika data telah terkirim dari aplikasi ke sistem ditandai dengan munculnya pemberitahuan nilai usia ikan dan jumlah ikan yang baru pada layar LCD 16x2. Berikut merupakan tabel data hasil pengujiannya.
|
Pengujian Ke |
Data Kirim (MQTT dashboard) |
Data Terima (Sistem) |
Keterangan | ||
|
Usia Ikan |
Jumlah Ikan |
Usia Ikan |
Jumlah Ikan | ||
|
1 |
23 |
50 |
23 |
50 |
Berhasil |
|
2 |
36 |
72 |
36 |
72 |
Berhasil |
|
3 |
45 |
87 |
45 |
87 |
Berhasil |
|
4 |
56 |
100 |
56 |
100 |
Berhasil |
|
Hari Ke |
Usia Ikan (Hari) |
Waktu Pakan dengan Alat | ||
|
Waktu Pemberian Pakan |
Keberhasilan Alat | |||
|
Pagi |
Sore | |||
|
1 |
23 |
06:01 |
18:01 |
Berhasil |
|
2 |
24 |
06:01 |
18:01 |
Berhasil |
|
3 |
25 |
06:01 |
18:01 |
Berhasil |
|
4 |
26 |
06:01 |
18:01 |
Berhasil |
|
5 |
27 |
06:01 |
18:01 |
Berhasil |
|
6 |
28 |
06:01 |
18:01 |
Berhasil |
|
7 |
29 |
06:01 |
18:01 |
Berhasil |
|
8 |
30 |
06:01 |
18:01 |
Berhasil |
|
9 |
31 |
06:01 |
18:01 |
Berhasil |
|
10 |
32 |
06:01 |
18:01 |
Berhasil |
|
11 |
33 |
06:01 |
18:01 |
Berhasil |
|
12 |
34 |
06:01 |
18:01 |
Berhasil |
|
13 |
35 |
06:01 |
18:01 |
Berhasil |
|
14 |
36 |
06:01 |
18:01 |
Berhasil |
|
15 |
37 |
06:01 |
18:01 |
Berhasil |
|
16 |
38 |
06:01 |
18:01 |
Berhasil |
|
17 |
39 |
06:01 |
18:01 |
Berhasil |
|
18 |
40 |
06:01 |
18:01 |
Berhasil |
|
19 |
41 |
06:01 |
18:01 |
Berhasil |
|
20 |
42 |
06:01 |
18:01 |
Berhasil |
|
21 |
43 |
06:01 |
18:01 |
Berhasil |
|
22 |
44 |
06:01 |
18:01 |
Berhasil |
|
23 |
45 |
06:01 |
18:01 |
Berhasil |
|
24 |
46 |
06:01 |
18:01 |
Berhasil |
|
25 |
47 |
06:01 |
18:01 |
Berhasil |
|
26 |
48 |
06:01 |
18:01 |
Berhasil |
|
27 |
49 |
06:01 |
18:01 |
Berhasil |
|
28 |
50 |
06:01 |
18:01 |
Berhasil |
|
29 |
51 |
06:01 |
18:01 |
Berhasil |
|
30 |
52 |
06:01 |
18:01 |
Berhasil |
|
31 |
53 |
06:01 |
18:01 |
Berhasil |
|
32 |
54 |
06:01 |
18:01 |
Berhasil |
|
33 |
55 |
06:01 |
18:01 |
Berhasil |
|
34 |
56 |
06:01 |
18:01 |
Berhasil |
|
35 |
57 |
06:01 |
18:01 |
Berhasil |
|
36 |
58 |
06:01 |
18:01 |
Berhasil |
|
37 |
59 |
06:01 |
18:01 |
Berhasil |
|
38 |
60 |
06:01 |
18:01 |
Berhasil |
|
39 |
61 |
06:01 |
18:01 |
Berhasil |
|
40 |
62 |
06:01 |
18:01 |
Berhasil |
|
41 |
63 |
06:01 |
18:01 |
Berhasil |
|
42 |
64 |
06:01 |
18:01 |
Berhasil |
|
43 |
65 |
06:01 |
18:01 |
Berhasil |
|
44 |
66 |
06:01 |
18:01 |
Berhasil |
|
45 |
67 |
06:01 |
18:01 |
Berhasil |
Dari tabel pengujian dapat diketahui bahwa selama 45 hari pengujian, sistem berjalan sesuai perintah, yaitu pakan akan
diberikan setiap pukul 06:01dan 18:01 dan memiliki tingkat keakuratan 100%.
-
E. Pengujian Keakuratan Berat Pakan
Pengujian ini bertujuan untuk mengetahui apakah berat pakan yang diberikan sesuai dengan takaran seharusnya yang diproses dalam fuzzy logic terlebih dahulu. Pengukuran berat pakan yang akan diberikan akan ditampilkan terlebih dahulu pada layar lcd 16x2, sehingga dapat dibandingkan antara berat pakan seharusnya dan berat pakan yang diberikan oleh sistem. Pengujian dilakukan selama 4 minggu dan usia ikan lele yang digunakan mulai dari 23 hari sebanyak 100 ekor. Berikut merupakan tabel hasil pengujiannya.
TABEL VI
Data Pengujian Keakuratan Berat Pakan
|
Hari Ke |
Usia Ikan (Hari) |
Berat Pakan (gr) | ||||
|
Takaran |
Pagi |
Error (%) |
Sore |
Error (%) | ||
|
1 |
23 |
22,3 |
25,2 |
13,00 |
25,6 |
14,80 |
|
2 |
24 |
22,7 |
24,7 |
8,81 |
25 |
10,13 |
|
3 |
25 |
23,1 |
24,1 |
4,33 |
26,3 |
13,85 |
|
4 |
26 |
23,6 |
25,9 |
9,75 |
25,4 |
7,63 |
|
5 |
27 |
24,1 |
26,6 |
10,37 |
26,7 |
10,79 |
|
6 |
28 |
24,6 |
26,5 |
7,72 |
27,8 |
13,01 |
|
7 |
29 |
25,2 |
27,8 |
10,32 |
26,9 |
6,75 |
|
8 |
30 |
26,1 |
29,4 |
12,64 |
28 |
7,28 |
|
9 |
31 |
42,7 |
44,7 |
4,68 |
45,8 |
7,26 |
|
10 |
32 |
53,8 |
55,3 |
2,79 |
55 |
2,23 |
|
11 |
33 |
61,1 |
62,9 |
2,95 |
64,3 |
5,24 |
|
12 |
34 |
64,8 |
67,5 |
4,17 |
67,1 |
3,55 |
|
13 |
35 |
66,6 |
69,8 |
4,80 |
68,7 |
3,15 |
|
14 |
36 |
67,9 |
70,1 |
3,24 |
69,4 |
2,21 |
|
15 |
37 |
68,7 |
71,7 |
4,37 |
71,3 |
3,78 |
|
16 |
38 |
69,3 |
72,2 |
4,18 |
73,6 |
6,20 |
|
17 |
39 |
69,7 |
73,9 |
6,03 |
72,1 |
3,44 |
|
18 |
40 |
70 |
73,9 |
5,57 |
73,4 |
4,86 |
|
19 |
41 |
79,4 |
82,2 |
3,53 |
83,5 |
5,16 |
|
20 |
42 |
87 |
88,7 |
1,95 |
89 |
2,30 |
|
21 |
43 |
93,5 |
95,1 |
1,71 |
96,3 |
2,99 |
|
22 |
44 |
99,4 |
103 |
3,62 |
100,9 |
1,51 |
|
23 |
45 |
105 |
107,2 |
2,10 |
108,3 |
3,14 |
DOI: https://doi.org/10.24843/ MITE.2023.v22i01.P03
|
24 |
46 |
111 |
114,4 |
3,06 |
114,1 |
2,79 |
|
25 |
47 |
117 |
120,3 |
2,82 |
119,6 |
2,22 |
|
26 |
48 |
123 |
125,8 |
2,28 |
126,7 |
3,01 |
|
27 |
49 |
131 |
134,9 |
2,98 |
134,2 |
2,44 |
|
28 |
50 |
140 |
142 |
1,43 |
143,9 |
2,79 |
|
29 |
51 |
149 |
152,9 |
2,62 |
153,2 |
2,82 |
|
30 |
52 |
157 |
161,8 |
3,06 |
160,7 |
2,36 |
|
31 |
53 |
163 |
166,1 |
1,90 |
166,4 |
2,09 |
|
32 |
54 |
169 |
172,7 |
2,19 |
173,3 |
2,54 |
|
33 |
55 |
175 |
178,2 |
1,83 |
177,6 |
1,49 |
|
34 |
56 |
181 |
183,9 |
1,60 |
184,1 |
1,71 |
|
35 |
57 |
187 |
190,9 |
2,09 |
191,4 |
2,35 |
|
36 |
58 |
193 |
196,2 |
1,66 |
197,5 |
2,33 |
|
37 |
59 |
201 |
205,7 |
2,34 |
204 |
1,49 |
|
38 |
60 |
210 |
213,1 |
1,48 |
214,3 |
2,05 |
|
39 |
61 |
220 |
225,2 |
2,36 |
224,8 |
2,18 |
|
40 |
62 |
227 |
229,7 |
1,19 |
232,9 |
2,60 |
|
41 |
63 |
234 |
237,1 |
1,32 |
238 |
1,71 |
|
42 |
64 |
239 |
242,9 |
1,63 |
242,8 |
1,59 |
|
43 |
65 |
245 |
249,6 |
1,88 |
250,2 |
2,12 |
|
44 |
66 |
251 |
254,5 |
1,39 |
254,3 |
1,31 |
|
45 |
67 |
257 |
261,8 |
1,87 |
262,1 |
1,98 |
Dari tabel pengujian diatas, dapat diketahui bahwa selama 45 hari pengujian, sistem dapat memberikan pakan sesuai dengan takaran dengan akurasi mencapai 98,9% dengan rata-rata akurasi 96,09%.
Alat pemberi pakan ikan lele dalam drum otomatis dengan menggunakan metode fuzzy logic ini dapat membantu pembudidaya lele dalam drum untuk mengontrol pemberian pakan kepada ikan lele agar berat pakan yang diberikan sesuai dengan usia dan jumlah ikan lele dalam satu drum secara otomatis. Selama sistem dan smartphone pembudidaya terhubung dengan internet, pembudidaya ikan lele dapat mengirim data usia ikan dan jumlah ikan, serta dapat memantau berat sisa pakan yang tersisa dari jarak jauh.
Referensi
-
[1] Agus, D. S, “IbM Budidaya Lele Dalam Air Limbah Sistem Tong Bekas Di Kelompok Pengrajin Sasirangan dan Masyarakat Kawasan Industri Karet Pelambuan Banjarmasin,” Jurnal ABDI INSANI Unram, 2014.
-
[2] Allya A. P. Syah, K. S, “Sistem Pemberi Pakan Otomatis, Ph Regulator Dan Kendali Suhu Menggunakan Fuzzy Logic Pada Aquarium,”Jurnal Teknologi Elektro, Vol. 10 No. 3, 2019.
-
[3] Gunawan, 99% Sukses Budidaya Lele, Jakarta Timur: Penebar Swadaya, 2016.
-
[4] Harika Devi Kotha, V. M, “IoT Application, A Survey,” International Journal of Engineering & Technology, 2018.
-
[5] Ken (2020) Mengenal Teknik Budidaya Lele Tingkat Dasar. [Online]. Available: https://perikanan.pamekasankab.go.id/mari-mengenal-
teknik-budidaya-lele-tingkat-
dasar.html#:~:text=Perhatikan%20Pakan%20Lele&text=Takaran%20p emberian%20pakan%20berkisar%20antara,tidak%20mengendap%20d an%20menjadi%20racun.
-
[6] Kordi, M. G. Kiat Sukses Pembesaran Lele Unggul. Yogyakarta: Lily Publisher, 2012.
-
[7] KKP, “Refleksi & Outlook 2018 & 2019.” Kementerian Kelautan dan Perikanan, 2018.
-
[8] Agusma W, “Implementasi Fuzzy Logic Pada Robot Line Follower,” Jurnal Teknologi Informasi dan Ilmu Komputer (JTIIK), Vol. 5, No. 4, 2018.
-
[9] C. G. I. Raditya, P. A. S. Dharma, and K. A. Widyatmika, “Pendeteksi Penggunaan Masker Wajah dengan ESP32 Cam Menggunakan OpenCV dan TensorFlow,” Majalah Ilmiah Teknologi Elektro, Vol. 21, No.2, Juli – Desember 2022.
-
[10] P. L. B. S. J. Amertha, R. S. Hartati, and M. Sudarma, “Sistem Monitoring dan Kontrol Tangki Air Menggunakan Raspberry Pi Berbasis Bot Telegram,” Majalah Ilmiah Teknologi Elektro, Vol. 21, No.2, Juli - Desember 2022.
-
[11] I K. C. Arta, I K. A. H. Anggara, A. Febriyanto, “Advanced Fire & Gas Safety Control Berbasis IoT,” Majalah Ilmiah Teknologi Elektro, Vol. 21, No.2, Juli - Desember 2022.
-
[12] J. Nasir, and J. Suprianto, “Analisis Fuzzy Logic Menentukan Pemilihan Motor Honda Dengan Metode Mamdani,” Jurnal Edik Informatika V3.i2(177-186) 2017.
-
[13] G. Dewantoro, D. Susilo, and P. P. Adi, “Implementasi Pengendali Logika Fuzzy pada Navigasi Robot Penjejak Dinding,” Majalah Ilmiah Teknologi Elektro, Vol. 16, No. 02, Mei - Agustus 2017.
-
[14] E. T. Ariyanto, and Sutikno, “Penerapan Logika Fuzzy Untuk Menentukan Kondisi Mesin Pada Motor Transmisi Manual (Studi Kasus Honda Cs-1),” Jurnal SIMETRIS, Vol. 9 No. 1 April 2018.
-
[15] Y. Efendi, “Internet Of Things (IoT) Sistem Pengendalian Lampu Menggunakan Raspberry Pi Berbasis Mobile,” Jurnal Ilmiah Ilmu Komputer, Vol. 4, No. 1, April 2018.
-
[16] F. Susanto, N. K. Prasiani, and P. Darmawan, “Implementasi Internet Of Things Dalam Kehidupan Sehari-Hari,” Jurnal Imagine Vol. 2 No 1 – April 2022.
-
[17] J. Iskandar, and D. K. Utami, "Penerapan Fuzzy Logic Untuk Meningkatkan Derajat Kebenaran Deteksi Pada Alat Bantu Buta Warna Berbasis Sensor Optik,” Jurnal Ilmiah Ilmu Komputer dan Matematika Vol.16, No.1, Januari 2019.
-
[18] A. Jemaa, O. Zarrad, M. A. Hajjaji,and M. N. Mansouri, "Hardware Implementation of a Fuzzy Logic Controller for a Hybrid Wind-Solar System in an Isolated Site," International Journal of Photoenergy Volume 2018.
-
[19] A. A. Yufrida, L. P. Rahayu, and D. F. Syahbana, “Implementasi Kontrol Torsi Motor Servo Menggunakan Metode PI pada Sistem Automatic Pallet Dispenser,” Jurnal Teknik Its Vol. 10, No. 2, 2021.
-
[20] U. Latifa, and J. S. Saputro, "Perancangan Robot Arm Gripper Berbasis Arduino Uno Menggunakan Antarmuka Labview," Barometer, Volume 3 No.2, Juli 2018.
-
[21] Ramdan, Lasmadi, and P. Setiawan, "Sistem Pengendali On-Off Lampu dan Motor Servo sebagai Penggerak Gerendel Pintu Berbasis Internet Of Things (IoT)," AVITEC, Vol. 4, No. 2, August 2022.
ISSN 1693 – 2951
Setia Yusuful Arif: Alat Pemberi Pakan Ikan …
Discussion and feedback