Pembacaan Jarak dan Kecepatan dengan ArUco Marker pada Sistem Koper Follow Me Beroda
on
Majalah Ilmiah Teknologi Elektro, Vol. 21, No.1, Januari – Juni 2022 DOI: https://doi.org/10.24843/MITE.2022.v21i01.P14
97
Pembacaan Jarak dan Kecepatan dengan ArUco Marker pada Sistem Koper Follow Me Beroda
Agus Triwahyudin1, Hari Kurnia Safitri2, Mila Fauziyah3
[Submission : 04-01-2022, Accepted :20 –03-2022]
Abstract—The Wheeled Follow Me Suitcase is an automatic robot that can follow human journeys to carry goods to meet their needs. This suitcase has 2 modes; manual and automatic modes. The manual mode of the suitcase will be used like a suitcase in general. While the automatic mode, the suitcase will always follow the owner who already has a special mark (markers). The main components of this system are raspberry pi camera, raspberry pi 4, push button, buzzer, motor driver and dc motor. By doing image processing on special marks (markers) so as to produce a variable distance. The results of processing the reading of the distance variable will be processed into a speed variable, so that the error data range will be obtained. The use of markers of the ArUcoMarker type, limits the distance for reading special marks to a maximum distance of 2 meters which is as stable as possible at a distance of 1 meter. To anticipate failure in reading, a buzzer is used as a sign that the follow me suitcase has been far from the user. In the test results using markers of the ArUco Markers type, a minimum distance of 74 mm is produced, a maximum of 2170 mm. With the smallest reading error rate at a distance of 400 mm and 1100 mm while the largest reading error at a distance of 2000 mm and for the average distance reading error of 0.55%.
Keywords—Image Processing, Raspberry Pi, ArUco Markers.
Intisari—Koper Follow Me Beroda merupakan robot otomatis yang dapat mengikuti perjalanan manusia untuk membawa barang dalam memenuhi keperluanya. Koper ini memiliki 2 mode; mode manual dan otomatis. Mode manual koper akan digunakan layaknya koper pada pada umumnya. Sedangkan mode otomatis, koper akan selalu mengikuti pemiliknya yang sudah memiliki tanda khusus (markers). Komponen utama sistem adalah kamera raspberry pi, raspberry pi 4, push button, buzzer, driver motor dan motor dc. Dengan melakukan image processing pada tanda khusus (markers) sehingga menghasilkan variabel jarak. Hasil pengolahan pembacaan variabel jarak akan diproses mejadi variabel kecepatan, sehingga range data error akan didapatkan. Penggunaan marker tipe ArUco Marker, pembatasan jarak pembacaan tanda khusus dengan jarak maksimal sejauh 2 meter yang sebisa mungkin stabil pada jarak 1 meter.
Untuk mengantisipasi kegagalan pembacaan digunakan buzzer sebagai tanda bahwa Koper Follow Me telah jauh dari penggunanya. Pada hasil pengujian dengan menggunakan marker tipe ArUco Markers dihasilkan jarak minimal 74 mm, maksimal 2170 mm. Dengan tingkat error pembacaan paling kecil pada jarak 400 mm dan 1100 mm sedangkan untuk error pembacaan paling besar pada jarak 2000 mm dan untuk rata-rata error hasil pembacaan jarak sebesar 0,55 %.
Kata Kunci—Image Processing, Raspberry Pi, ArUco Markers, Tanda Khusus
-
I. Pendahuluan
Menurut KBBI, koper adalah peti yang terbuat dari kulit (kaleng dan sebagainya) yang digunakan sebagai tempat menyimpan pakaian yang dapat dibawa di perjalanan [1]. Koper juga sangat mudah digunakan, dengan cara menarik tuas pegangan ke atas dan menarik kopernya. Pada pemakaiannya koper yang ditarik tuasnya membutuhkan tenaga berupa gaya tarik. Gaya tarik sendiri tidak semua orang dapat melakukannya, seperti orang lanjut usia dan penyandang disabilitas.
Robot secara pengertian adalah gabungan antara instrumen mekanikal dan elektrikal yang melaksanakan perintah secara fisik maupun non fisik, dimana mampu bekerja tanpa pengawasan maupun kontrol manusia. Robot dengan diberikannya sebuah perintah atau sebuah program yang sesuai algoritma oleh pengguna dan mampu memodifikasi program secara mandiri bisa disebut dengan Kecerdasan Buatan.
Berdasarkan penelitian terdahulu yang pernah dilakukan yang membahas tentang upaya keamanan koper di bagasi yang dapat diketahui dengan keberadaan posisi koper dan otomatis dalam penimbangan berat, serta menguji pengaruh perbedaan provider yang digunakan pada GPS [2]. Penelitian selanjutnya membahas tentang upaya menggerakkan koper secara manual dengan joystick aplikasi Blynk dengan komunikasi Bluetooth dan secara otomatis dengan bantuan sensor GPS, Ultrasonik dan Kompas, serta menguji GPS, jangkauan bluetooth, gerakan alat dan kecepatan koper [3].
Dari penelitian ini akan dibahas bagaimana cara mengontrol Koper Follow Me yang mengikuti penggunanya dengan menggunakan sensor kamera untuk mendeteksi dan menghitung jarak maupun kecepatan pengguna. Untuk mengikuti penggunanya koper akan mendeteksi sebuah objek identik berupa Marker yang di tempelkan pada kaos

penggunanya. Tipe Marker yang dibaca oleh sensor kamera adalah ArUco Markers. Dengan adanya Marker dapat membuat pergerakkan Koper Follow Me menjadi lebih stabil, tidak memerlukan tenaga tambahan manusia dan sistem mampu dioperasikan oleh semua masyarakat. Diharapkan dengan sistem Koper Follow Me dapat dimanfaatkan baik untuk peneltian, pameran dan keseharian.
-
II. Tinjauan Pustaka
Berikut ini merupakan beberapa tinjauan pustaka yang memiliki keterkaitan dengan sistem yang dibuat.
-
A. Robot
Menurut definisi dari kamus Meriam-Webster, robot adalah mesin yang terlihat seperti manusia dan melakukan berbagai tindakan yang kompleks dari manusia seperti berjalan atau berbicara, atau suatu peralatan yang bekerja secara otomatis. Robot biasanya diprogram untuk melakukan pekerjaan berulang kali dan memiliki mekanisme yang dipandu oleh kontrol otomatis. Sedangkan robotika adalah cabang teknologi yang berkaitan dengan desain, konstruksi, operasi, dan aplikasi dari robot. Robotika merupakan cabang ilmu pengetahuan yang mempelajari tentang robot. Cabang ilmu tersebut mencakup desain mesin robot, elektronika, pengontrolan, pemrograman komputer, kecerdasan buatan, dan lain sebagainya.
Terdapat pendapat lain mengenai definisi robot, seperti diutarakan oleh Robotic Institute of America sebuah institusi robot yang terdapat 18 di Universitas Carnegie Mellon di kota Pittsburgh, negara bagian Pensilvania, Amerika Serikat, pada tahun 1979 mendefinisikan secara formal yang dimaksud dengan robot adalah "manipulator multi fungsi dan dapat diprogram ulang yang dirancang untuk menggerakkan material, alat, atau perangkat khusus melalui sejumlah gerakan terprogram untuk melakukan aktifitas tertentu" [4].
-
B. Kamera Raspberry Pi V2
Modul kamera raspberry pi adalah produk resmi yang dibuat dan dikeluarkan oleh Raspberry Pi Foundation. Modul yang berspesifikasi dengan resolusi 5 MP untuk versi asli (V1) yang dirilis pada 2013, sedangkan Modul kamera berspesifikasi dengan resolusi 8 MP untuk versi V2 yang dirilis pada 2016. Untuk kedua literasi, ada yang memilki versi cahaya tampak dan inframerah. Modul kamera raspberry pi yang terbaru memilki spesifikasi resolusi sebesar 12 MP yang dirilis pada tahun 2020 [5].
Modul kamera bawaan dari Raspberry Pi biasa digunakan untuk merekam vidio dengan High Definition. Untuk mengkoneksikannya modul kamera terdapat CSI port [6].

Gambar 1 : Kamera Raspberry Pi V2
-
C. Push Button Switch
Push button switch (saklar tombol tekan) adalah instrument berupa saklar sederhana yang berfungsi untuk menghubungkan atau memutuskan aliran arus listrik dengan sistem kerja tekan unlock (tidak mengunci). Push button switch berfungsi untuk mengirim sinyal aktif logika 1(high) maupun (low) ke sistem mikrokontroler atau mini komputer [7]. Sebagai device penghubung atau pemutus, push button switch hanya memiliki 2 kondisi, yaitu on dan off (1 dan 0). Istilah on dan off ini menjadi sangat penting karena semua perangkat listrik yang memerlukan sumber energi listrik pasti membutuhkan kondisi on dan off [8].
-
D. Baterai Li-Po
Baterai adalah suatu proses kimia listrik, dimana pada saat pengisian energi listrik diubah menjadi kimia dan saat pengeluaran / discharge energi kimia diubah menjadi energi listrik. Baterai menghasilkan listrik melalui proses kimia. Baterai atau akumulator adalah sebuah sel listrik dimana didalamnya berlangsung proses elektrokimia yang reversibel (dua arah) dengan efisiensinya yang tinggi. Yang dimaksud dengan reaksi elektrokimia reversibel adalah didalam baterai dapat berlangsung proses pengubahan kimia menjadi tenaga listrik (proses pengosongan) dan sebaliknya dari tenaga listrik menjadi tenaga kimia (proses pengisian) dengan cara proses regenerasi dari elektroda-elektroda yang dipakai yaitu, dengan melewatkan arus listrik dalam arah polaritas yang berlawanan didalam sel. Baterai terdiri dari dua jenis yaitu, baterai primer dan baterai sekunder [9].
Sering dijumpai pada label di baterai lithium polymer yang sering kali disimbolkan dengan huruf “S”. S berarti “sel” yang dimiliki paket baterai (battery pack), di bagian depan simbol terdapat bilangan yang menandakan jumlah sel, dan berkisar antara 2-6S. Setiap sel dalam baterai Li-Po memiliki tegangan nominal 3,6 V. Energi yang tersimpan dalam baterai, ditunjukkan dengan kapasitas yang tertera pada baterai dengan satuan miliampere hours (mAh) [10]. Baterai Li-Po memiliki kekurangan yaitu penurunan pada charging (pengisian daya) dan discharging rate (tahap pengisian daya). Hal ini disebabkan karena aliran pertukaran ion yang melalui elektrolit polimer kering tersebut lemah [11].
-
E. Raspberry Pi
Raspberry pi atau dikenal dengan RasPi adalah SBC (Single Board Computer) yang ukurannya sebesar kartu kredit yang dikembangkan, dibuat dan dirilis oleh Raspberry Pi Foundation. Ide ini muncul ketika beberapa mahasiswa Laboratorium Komputer di Universitas Cambridge, yakni Eben Upton, Rob Mullins, Jack Lang, dan Alan Mucroft. Nama raspberry pi diambil dari nama buah yaitu buah raspberry,
sedangkan pi diambil dari kata python, yaitu nama salah satu bahasa pemrograman phyton dijadikan bahasa pemrograman utama dari raspberry pi, namun tidak tertutup kemungkinan untuk menggunakan bahasa pemrograman lain pada raspberry pi. Raspberry pi merupakan modul mini komputer yang juga mempunyai input output digital port seperti pada board microcontroler. Kelebihan raspberry pi dibanding dengan board microcontroler lain yaitu mempunyai port atau koneksi untuk display berupa TV atau monitor PC serta koneksi USB untuk keyboard serta mouse [12]. Raspberry pi masuk dalam kelas komputer multi-user yang dalam spektrum komputasi berada di posisi menengah dibawah kelas komputer mainframe dan sistem komputer single-user seperti komputer pribadi [13].
-
F. Markers
Marker ArUco adalah marker kotak sintetik yang disusun oleh garis tepi hitam lebar dan matriks biner bagian dalam yang menentukan pengidentifikasi (id). Perbatasan hitam memfasilitasi deteksi cepat dalam gambar dan kodifikasi biner memungkinkan identifikasi dan penerapan teknik deteksi kesalahan dan koreksi. Ukuran marker menentukan ukuran matriks internal. Misalnya ukuran marker 4x4 terdiri dari 16 bit. Manfaat utama mereka adalah deteksi mereka kuat, cepat dan sederhana. Modul ArUco mencakup deteksi jenis penanda ini dan alat untuk menggunakannya untuk pose estimation dan kalibrasi kamera [14]. Untuk fungsinya dapat digunakan untuk pengenalan objek dalam misi pendaratan dan pembacaan jarak dengan menggunakan library ArUco Marker yang terdapat pada OpenCV, sehingga didapatkan sumbu x, y dan z dari Markers [15].
Gambar 2 : ArUco Marker
-
G. Driver Motor H-Brigde
Susunan 4 buah saklar yang dapat diaktifkan berpasangan ataupun sendiri - sendiri dan yang dikenal sebagai rangkaian penggerak H-Bridge. Terapan dari rangkaian tersebut adalah penggerak motor dc, pengubah dc ke dc (konverter), maupun pengubah dc ke ac (inverter). Jika rangkaian tersebut digunakan untuk beban motor dc maka arah putaran ditentukan dari keadaan aktif pasangan saklar diagonal
sedangkan kecepatannya ditentukan dari duty cycle PWM (Pulse With Modulation) dari kendali atau kontrolernya [16].
Driver Motor L298N merupakan modul driver motor DC yang paling banyak digunakan atau dipakai di dunia elektro yang difungsikan untuk mengontrol kecepatan serta arah perputaran motor DC. Spesifikasi driver motor L298N adalah sebagai berikut : IC yang digunakan adalah IC L298N (Double H Bridge Drive Chip), tegangan input minimal 5-35V, tegangan operasional 5V, arus untuk masukan 036mA, arus maksimal untuk keluaran per output A maupun B 2A, daya maksimal 25W, dimensi modul 43mm x 43mm x 26mm, dan berat modul 26 gram [17].
-
H. Motor DC
Motor DC adalah instrumen elektronik dan mekanik dasar yang berfungsi untuk mengubah tenaga listrik menjadi tenaga mekanik. Motor DC merupakan jenis motor yang menggunakan tegangan searah sebagai sumber tenaganya. Dengan memberikan beda tegangan pada kedua terminal tersebut, motor akan berputar pada satu arah, dan bila polaritas dari tegangan tersebut dibalik maka arah putaran motor akan terbalik pula[18]. Berdasarkan sumber arus penguat magnetnya, motor DC dibedakan menjadi 2 jenis, yaitu motor DC dengan penguat terpisah (separately-excited) dan motor DC dengan penguat sendiri (self-excited) [19]. Motor DC bekerja secara non linear terutama saat terjadi diberi variasi beban. Pengendali dapat menggunakan PID kontroller dan linear quadratic regulator (LQR) [20].
-
I. Buzzer
Buzzer adalah instrumen elektronika yang berfungsi mengubah getaran listrik menjadi getaran suara. Pada dasarnya cara kerja buzzer hampir sama dengan loud speaker, buzzer terdiri dari kumparan yang terpasang pada diafragma dan kemudian kumparan tersebut dialiri arus sehingga menjadi energi magnet, kumparan tadi akan tertarik ke dalam atau keluar, tergantung dari arah arus dan polaritas magnetnya, karena kumparan dipasang pada diafragma maka setiap gerakan kumparan akan menggerakkan diafragma secara bolak-balik sehingga membuat udara bergetar yang akan menghasilkan suara [21]. Buzzer yang termasuk dalam keluarga transduser juga sering disebut dengan beeper. Ada 2 jenis buzzer yaitu buzzer aktif dan buzzer pasif. Buzzer aktif adalah buzzer yang bisa mempunyai suaranya sendiri, sehingga buzzer jenis ini dapat berdiri sendiri, cukup menghubungkannya ke listrik dan terdengar suara. Tanpa perlu tambahan rangkaian oscilator. Buzzer pasif adalah buzzer yang tidak mempunyai suaranya sendiri. Sehingga perlu ditambahkan suara atau nada. Dibutuhkan rangkaian oscilator untuk membangkitkan suara buzzer pasif. Speaker adalah salah satu contoh buzzer pasif [22].
-
III. Metode Penelitian
Hasil dan pembahasan pada pembacaan jarak dan kecepatan dengan ArUco Marker pada sistem Koper Follow Me Beroda adalah sebagai berikut.
-
A. Blok Diagram Sistem
Agus Triwahyudin : Pembacaan Jarak dan Kecepatan …
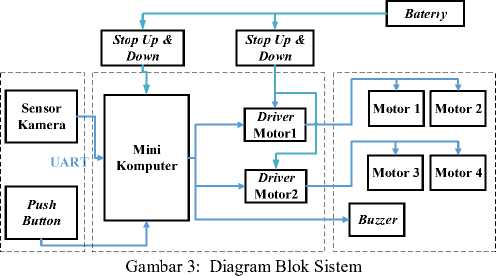
Prinsip kerja dari sistem, langkah pertama yang dilakukan membuat tanda khusus dan mencetaknya pada kaos dan dipakai oleh user. Tanda khusus juga diinisialisasi pada mini komputer, proses pembacaan tanda khusus atau Marker dilakukan oleh sensor kamera. Untuk menyalakan sistem dengan menekan push button pada alat Koper Follow Me sehingga sistem beralih ke mode otomatis, sensor kamera mulai meng-capture secara langsung. Hasil capture secara langsung ini digunakan untuk mengetahui jarak yang diperkirakan akurat. Setelah itu, mini komputer akan mengkonversi nilai jarak menjadi kecepatan, jarak dan kecepatan terdeteksi ketika user melakukan perpindahan posisi. Pada Sistem Koper Follow Me diberikan algoritma dengan perintah “Jarak yang harus diset adalah 1 meter secara konstans”, maka dari itu untuk menstabilkan jarak 1 meter user dengan sistem, mini komputer akan menggerakkan empat motor pada Sistem Koper Follow Me dengan melalui driver motor. Untuk keamanan Sistem Koper Follow Me apabila jarak melebihi 1 meter, maka diberikan tambahan aktuator berupa buzzer sebagai pengingat user “Bahwa Sistem Koper Follow Me jaraknya sudah melebihi 1 meter dari user”. Untuk sumber daya pada alat Koper Follow Me menggunakan baterai yang distabilkan dengan menggunakan step up dan step down.
Posisi ID
Aruco Marker H Raspberry Pi 4
Motor DC
Jarak
Kecepatan
Camera Raspberry Pi V2
Gambar 4: Diagram Blok Kotrol
Pada Gambar 4 menjelaskam blok kontrol pada sistem berdasarkan set poin jarak yang dimasukkan pada sistem, sehingga kontrol dapat melakukan pemilihan keputusan berdasarkan plan. Untuk memastikan hasilnya dilakukan feedback berupa sensor kamera yang hasilnya akan menggerakkan 4 buah motor DC.
-
B. Perancangan Mekanik
Gambar desain perancangan mekanik keseluruhan bisa mencermati pada Gambar 5:
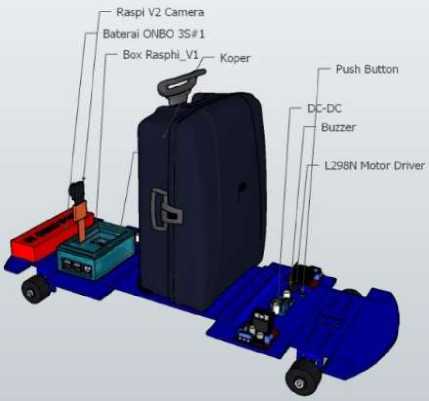
Gambar 5: Desain Perancangan Mekanik Sistem
-
C. Perancangan Elektronik
Perancangan ini merupakan perancangan elektronik alat dimana GPIO raspberry pi 4 sebagai pusat kontrol. Alat tersebut tersambung dengan input modul sensor kamera dan push button, sedangkan untuk output-nya berupa driver motor L298N, motor DC dan buzzer. Perancangan terdapat pada Gambar 6 :
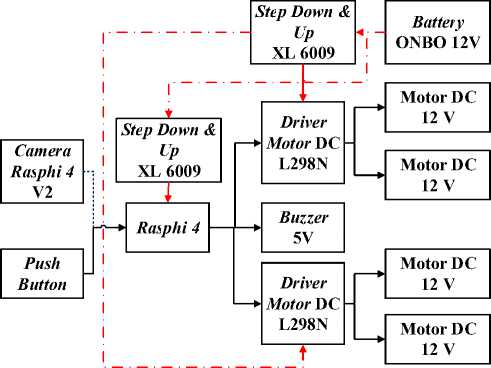
Gambar 6: Diagram Blok Rangkaian Elektronik
Keterangan :
: Kabel Power
k : Kabel CSI
___________> : Kabel GPIO
Pada garis merah putus -putus menjelaskan aliran power antar device, garis hitam putus – putus menjelaskan bahwa hubungan antar device secara CSI dan garis hitam menjelaskan hubungan antar device berisi data, power 5V dan ground.
Perancangan elektronik secara prinsip diawali oleh power supply dari baterai 4200mAh / 3S yang memilki arus maksimal 25 A. Baterai dihubungkan ke step down & up XL6009 sebagai
penstabil tegangan dengan output 5V untuk rasphi dan 12V untuk driver motor. Input sistem camera rasphi yang dihubungkan ke rasphi dengan kabel CSI dan push button yang dihubungkan ke GPIO rasphi. Sedangkan output sistem buzzer 5V, driver motor L298N dan motor dc 12V yang dihubungkan dengan GPIO rasphi.
1) Perancangan Wiring Sistem
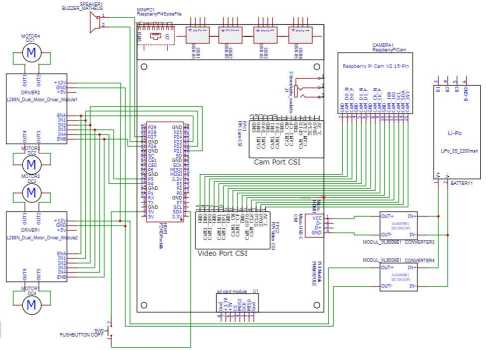
Perancangan wiring sistem berfungsi menjelaskan hubungan antara kontrol dengan sensor, kontrol dengan aktuator, kontrol dengan power, sehingga dengan adanya wiring sistem ini mampu mempermudah pemetaan kabel dalam sistem, meminimalkan pembeliaan kabel serta mempersingkat waktu dalam perakitan maupun pecarian kesalahan dalam me-wiring. Untuk detailnya dapat melihat Gambar 7 :

E.
Gambar 7: Desain Perancangan Wiring Sistem
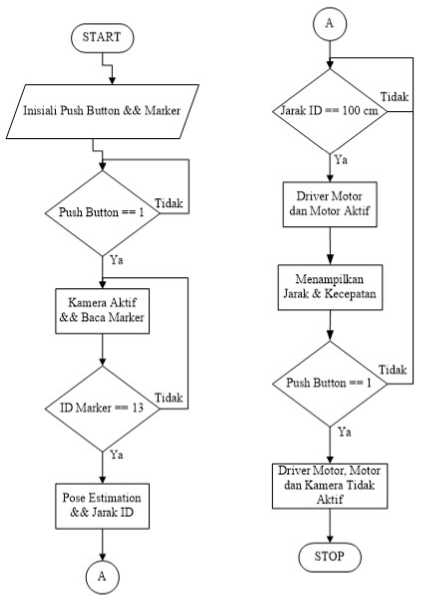
Gambar 8: Flowchart Software pada Sistem
Gambar 8 menjelaskan wiring input dan output yang dihubungkan dengan rasphi. Input berupa push button dihubungkan ke GPIO pin 4, untuk camera rasphi dihubungkan ke cam port CSI. Sedangkan output berupa buzzer dihubungkan ke GPIO pin 36, untuk driver L298N memilki pin ENA dihubungkan ke GPIO pin 33, ENB dihubungkan ke GPIO pin 32, IN1 dihubungkan ke GPIO pin 31, IN2 dihubungkan ke GPIO pin 29, IN3 dihubungkan ke GPIO pin 18 dan IN4 dihubungkan ke GPIO pin 16.
-
D. Perancangan Software
Perancangan software pada Gambar 8, menjelaskan pada sistem yang didalamnya terdapat, software mekanik dan software program. Untuk mekanik ada beberapa software yang dipakai diantara software Sketchup, Solidwork, Simplify dan EasyEDA. Sedangkan software untuk program yang diapakai adalah Etcher, Terminator dan Library - library Program.
Perancangan Program
Agus Triwahyudin : Pembacaan Jarak dan Kecepatan …
p-ISSN:1693 – 2951; e-ISSN: 2503-2372
.

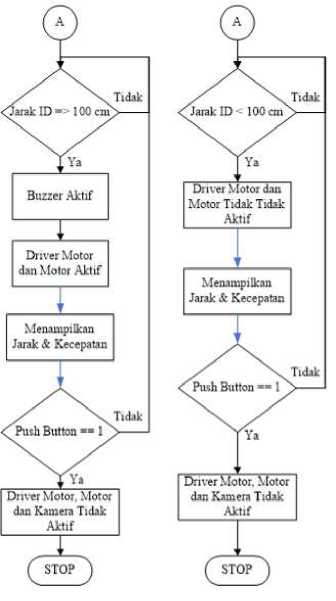
Gambar 9: Flowchart Program pada Sistem
Berdasarkan Gambar 9, marker yang digunakan pada adalah tipe marker: ArUco Marker, sebelum men-generate marker terlebih dahulu menentukan ID yang akan di-generate. untuk dapat men-generate ID marker dapat dilakukan dengan menggunakan website online dan program khusus marker. Dengan menentukan ukuran marker, ID marker dan tipe ordo marker (dictionary) yang digunakan pada sistem. Kemudian dilakukan penyetakan file ke PDF dan penyetakan ke media kaos. Dalam sistem ditentukan ID marker nya bernilai 13.
Untuk memastikan ID maker dengan tipe ordo ArUco Original bernilai 13, dapat dilakukan penghitungan secara manual. Untuk ArUco Original terdiri dari 7 x 7 baris dan kolom, untuk dapat dikodekan harus merubah ke 5 x 5 baris dan kolom. Untuk detail pengubahan baris dapat melihat Gambar 10 :
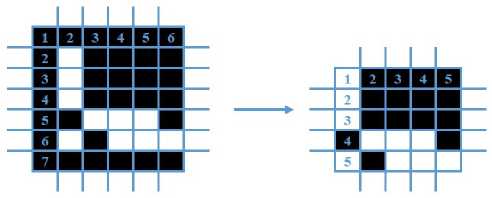
Gambar 10: Pengubahan Kolom dan Baris
Setelah dilakukan pengubahan kolom dan baris dilakukan pengkodean, pengkodean terletak dalam kolom 1 sampai 5. Untuk kolom 1, 3 dan 5 adalah data parity sedangkan untuk kolom 2 dan 4 adalah data ID yang akan di baca oleh sistem.
Sebelum melakukan pengkodean terlebih dahulu mengetahui maksud dari warna hitam dan putih dalam marker, untuk warna hitam nilainya 0 dan warna putih bernilai 1.
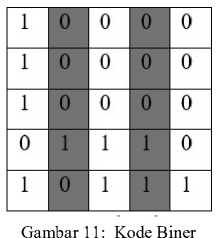
Dari Gambar 11 didapatkan nilai biner yang dibaca dari Gambar 10 dengan urutan per baris terlebih dulu baru pindah ke kolom selanjutnya, sehingga didapatkan nilai biner 0000001110. Sehingga nilai biner yang dirubah ke desimal nilainya 13. Dengan begitu generate ID dan perhitungan teori dapat dikatakan sesuai.
Proses selanjutnya melakukan pengujian dengan marker, apabila marker sudah dilakukan pengujian dan hasilnya sesuai. Maka marker dilakukan penyetakan pada kaos. Untuk hasil penyetakan bisa mencermati pada Gambar 12.

Gambar 12: Cetakkan Marker pada Kaos
Tahap selanjutnya adalah pembacaan ID marker yang sesuai, kalibrasi pada lensa dan menentukkan pose estimation markers. Dalam proses kalibrasi lensa disimpan pada format pckl dengan nama CameraCalibration, sehingga pada tahap pose estimation dapat membaca markers yang sesuai.
-
IV. Hasil dan Pembahasan
Pengujian sistem dilakukan untuk mengetahui fungsi perangkat dengan kondisi baru yang pertama kali dilakukan pengujian. Sehingga dapat mengetahui kondisi normal, tidak normal dan layak, tidak layaknya untuk perangkat yang dipakai pada sistem.
-
A. Pengujian Kamera
Tabel 1
Pengambilan Data Spesfikasi Kamera
|
Parameter |
Hasil |
|
Webcam |
mmal service 16.1 |
|
Kualitas |
107 |
|
Ada Mikropon |
Tidak Ada |
|
Ada Speaker |
Tidak Ada |
|
Frame |
31 FPS |
|
Tipe Stream |
Vidio |
|
Gambar |
RGB |
|
Rosolusi |
2,07 MP |
|
Resolusi W & H |
1920 x 1080 |
|
Standar Vidio |
FHD |
|
Rasio |
1,78 |
|
Ukuran PNG |
607,7 KB |
|
Ukuran JPEG |
189,82 |
|
Kecepatan |
5,67 MB/s |
|
Nomor Warna |
7955 |
|
Penerangan |
27,25% |
|
Kilauan |
26,23% |
|
Kecerahan |
27,45% |
|
Warna |
280˚ |
|
Saturasi |
6,47% |
Tabel 2
Pengambilan Data FPS Kamera
|
Parameter |
Hasil |
|
FPS | |
|
Rata - Rata |
29 |
|
Maksimum |
34 |
|
Minimal |
22 |
Tabel 3
Pengambilan Data Resolusi Kamera
|
Resolusi |
W & H |
MP |
Ket. |
|
QQVGA |
160 × 120 |
0,019 |
S |
|
QCIF |
176 × 144 |
0,025 |
S |
|
QCIF |
192 × 144 |
0,028 |
N S |
|
HQVGA |
240 × 160 |
0,038 |
N S |
|
QVGA |
320 × 240 |
0,077 |
S |
|
Video CD NTSC |
352 × 240 |
0,084 |
N S |
|
Video CD PAL |
352 × 288 |
0,101 |
S |
|
xCIF |
384 × 288 |
0,111 |
N S |
|
360p |
480 × 360 |
0,173 |
N S |
|
nHD |
640 × 360 |
0,230 |
N S |
|
VGA |
640 × 480 |
0,307 |
S |
|
SD |
704 × 480 |
0,338 |
N S |
Agus Triwahyudin : Pembacaan Jarak dan Kecepatan …
|
DVD NTSC |
720 × 480 |
0,346 |
N S |
|
WGA |
800 × 480 |
0,384 |
N S |
|
SVGA |
800 × 600 |
0,480 |
S |
|
DVCPRO HD |
960 × 720 |
0,691 |
S |
|
XGA |
1024 × 768 |
0,786 |
S |
|
HD |
1280 × 720 |
0,922 |
S |
|
WXGA |
1280 × 800 |
1,024 |
N S |
|
SXGA- |
1280 × 960 |
1,229 |
N S |
|
SXGA |
1280 × 1024 |
1,311 |
N S |
|
UXGA |
1600 × 1200 |
1,920 |
N S |
|
FHD |
1920 × 1080 |
2,074 |
S |
|
QXGA |
2048 × 1536 |
3,146 |
N S |
|
QSXGA |
2560 × 2048 |
5,243 |
N S |
|
QUXGA |
3200 × 2400 |
7,680 |
N S |
|
DCI 4K |
4096 × 2160 |
8,847 |
N S |
|
HXGA |
4096 × 3072 |
12,583 |
N S |
|
UW5K |
5120 × 2160 |
11,059 |
N S |
|
5K |
5120 × 2880 |
14,746 |
N S |
|
WHXGA |
5120 × 3200 |
16,384 |
N S |
|
HSXGA |
5120 × 4096 |
20,972 |
N S |
|
WHSXGA |
6400 × 4096 |
26,214 |
N S |
|
HUXGA |
6400 × 4800 |
30,720 |
N S |
|
8K UHD |
7680 × 4320 |
33,178 |
N S |
Berdasarkan pada Tabel 1, Tabel 2 dan Tabel 3 menjelaskan bahwa, Tabel 1 berisi data pengujian 20 paramter yang ada pada spesifikasi kamera, Tabel 2 berisi data pengujian FPS kamera sedangkan Tabel 3 berisi data pengujian resolusi kamera, dimana status “S” artinya support dan “NS” artinya not support.
Dalam mendapatkan hasil pembacaan yang akurat dan presisi kamera dilakukan kalibrasi. Untuk melakukan kalibrasi kamera dapat melalui program, dimana program membaca vidio dan memotongnya menjadi beberapa frame. Vidio dengan durasi 20 – 30 detik yang nantinya dipotong menjadi 150 frame. Dengan menggunakan chArUco marker yang diambil dari semua sisi yang menghasilkan sebuah nilai distorsi, nilai tersebut disimpan. Lebih detailnya dapat melihat Gambar 13.
Run: c* CBfibratiori-ChAruco
> j C:\Users\lenovo\PycharmPro]ects\pythcnProject\venv\Scripts\python.exe C:/
^ 150 valid captures
_ GeneratingcaliBration...
"*, Camera intrinsic parameters matrix:
b — [[489.49543108 θ. 316.51878554]
W [0. 48θ.99643239 224.61983458]
X S [ 0. O. 1. J]
Camera distortion coefficients: [[-Θ.0353777 0.11014684 -0.01684568 -0.02096676 -0.7436532 ∏
Calibration successful. Calibration file created: CameraCalibration.pckl
Process finished with exit code 0
I
-
► Run ≡TODO OProbIems HTermrnaI $ Python Packages ♦ Pjihon Console
Gambar 13: Niali Distorsi Kamera
-
B. Pengujian Motor
Tabel 4
Pengambilan Data Motor 1
|
Duty Cycle |
Tegangan (Volt) |
Arus (mA) |
Kondisi |
|
0 |
0 |
0 |
TB |
|
10 |
0,165 |
0,22 |
TB |
|
20 |
2,3 |
0,31 |
B |
|
30 |
4 |
0,4 |
B |
|
40 |
5,3 |
0,46 |
B |
|
50 |
6,4 |
0,5 |
B |
|
60 |
7,2 |
0,53 |
B |
|
70 |
7,9 |
0,57 |
B |
|
80 |
8,4 |
0,58 |
B |
|
90 |
8,7 |
0,6 |
B |
|
100 |
10,02 |
0,65 |
B |
Tabel 5
Pengambilan Data Motor 2
|
Duty Cycle |
Tegangan (Volt) |
Arus (mA) |
Kondisi |
|
0 |
0 |
0 |
TB |
|
10 |
0,165 |
0,2 |
TB |
|
20 |
2,2 |
0,3 |
B |
|
30 |
4 |
0,38 |
B |
|
40 |
5,5 |
0,43 |
B |
|
50 |
6,5 |
0,37 |
B |
|
60 |
7,4 |
0,49 |
B |
|
70 |
8 |
0,51 |
B |
|
80 |
8,5 |
0,52 |
B |
|
90 |
8,8 |
0,54 |
B |
|
100 |
10,07 |
0,55 |
B |
Tabel 6
Pengambilan Data Motor 3
|
Duty Cycle |
Tegangan (Volt) |
Arus (mA) |
Kondisi |
|
0 |
0 |
0 |
TB |
|
10 |
0,184 |
0,21 |
TB |
|
20 |
2,3 |
0,3 |
B |
|
30 |
4,2 |
0,37 |
B |
|
40 |
5,6 |
0,41 |
B |
|
50 |
6,7 |
0,45 |
B |
|
60 |
7,5 |
0,47 |
B |
|
70 |
8,1 |
0,49 |
B |
|
80 |
8,6 |
0,5 |
B |
|
90 |
9 |
0,51 |
B |
|
100 |
10,1 |
0,53 |
B |
Tabel 7
Pengambilan Data Motor 4
|
Duty Cycle |
Tegangan (Volt) |
Arus (mA) |
Kondisi |
|
0 |
0 |
0 |
TB |
|
10 |
0,185 |
0,2 |
TB |
|
20 |
2,2 |
0,3 |
B |
|
30 |
4 |
0,38 |
B |
|
40 |
5,4 |
0,43 |
B |
|
50 |
6,5 |
0,46 |
B |
|
60 |
7,4 |
0,49 |
B |
|
70 |
8 |
0,51 |
B |
|
80 |
8,4 |
0,52 |
B |
|
90 |
8,8 |
0,53 |
B |
|
100 |
10 |
0,56 |
B |
Berdasarkan Tabel 4, Tabel 5, Tabel 6 dan Tabel 7 menejelaskan pengujian motor pada sistem. Dengan melihat tabel tersebut didapatkan bahwa semua motor berputar (B) pada duty cycle 20 dengan tegangan kisaran 2,2 – 2,3 Volt dan arus kisaran 0,3 – 0,31 mA, sedangkan motor tidak berputar (TB) pada duty cycle 0 – 19. Sehingga dalam memprogram minimal
untuk menggerakkan 4 motor harus menggunakan duty cycle minimal 20.
-
C. Pengujian Keseluruan Sistem
Tabel 8
Pengambilan Data ArUco Marker dengan Ukuran Berbeda
|
Ukuran (mm2) |
Nilai Kalibrasi |
Jarak (mm) | |
|
Minimal |
Maksimal | ||
|
10 |
1,3 |
18 |
520 |
|
25 |
3,4 |
34 |
1230 |
|
50 |
6,8 |
74 |
2170 |
|
75 |
10,5 |
102 |
3500 |
|
100 |
13,8 |
143 |
4150 |
|
125 |
17,0 |
190 |
6280 |
|
150 |
20,9 |
213 |
7777 |
Berdasarkan hasil pengujian Markers pada Tabel 8 mendapatkan jarak minimal dan maksimal pembacaan Markers dengan bermacam – macam ukuran Markers. Pada sistem membutuhkan jarak stabil di 1000 mm dengan memilki kemampuan membaca jarak paling dekat dan mampu membaca pada jarak 2000 mm. Sehingga sesuai dengan Tabel 8 dan kebutuhan diatas untuk ukuran Markers yang paling tepat menggunakan ukuran 50 mm2.
Agus Triwahyudin : Pembacaan Jarak dan Kecepatan …
Tabel 9
Pengambilan Data Error ArUco Marker
|
Ukuran (mm2) |
Jarak Sebenarnya (mm) |
Jarak yang Terbaca (mm) |
Error (%) |
|
50 |
200 |
202 |
1,00 |
|
50 |
300 |
301 |
0,33 |
|
50 |
300 |
301 |
0,33 |
|
50 |
400 |
400 |
0,00 |
|
50 |
500 |
501 |
0,20 |
|
50 |
600 |
603 |
0,50 |
|
50 |
700 |
702 |
0,29 |
|
50 |
800 |
805 |
0,63 |
|
50 |
900 |
902 |
0,22 |
|
50 |
1000 |
1004 |
0,40 |
|
50 |
1100 |
1100 |
0,00 |
|
50 |
1200 |
1206 |
0,50 |
|
50 |
1300 |
1304 |
0,31 |
|
50 |
1400 |
1398 |
0,14 |
|
50 |
1500 |
1509 |
0,60 |
|
50 |
1600 |
1612 |
0,75 |
|
50 |
1700 |
1720 |
1,18 |
|
50 |
1800 |
1816 |
0,89 |
|
50 |
1900 |
1922 |
1,16 |
|
50 |
2000 |
2032 |
1,60 |
Berdasarkan hasil pengujian Markers pada Tabel 9 dengan 20 kali percobaan didapatkan nilai rata – rata error sebesar 0,55%.
Tabel 10
Pengambilan Keseluruan Sistem
|
No |
Jarak (mm) |
Kecepatan (mm/s) |
Kondisi | |
|
Buzzer |
Motor | |||
|
1 |
42,9 |
0,66 |
NA |
NA |
|
2 |
73,2 |
5,2 |
NA |
NA |
|
3 |
1001 |
0 |
NA |
A |
|
5 |
1827 |
5,2 |
A |
A |
|
6 |
1152 |
2,23 |
A |
A |
Berdasarkan hasil pengujian pada Tabel 10 pada jarak 42,9 mm dan 73,2 mm tidak mengaktifkan motor dan buzzer, pada jarak 1001 mm mengaktifkan motor sedangkan dengan jarak 1827 mm dan 1152 mengaktifkan motor dan buzzer. Sehingga dengan data yang diperoleh dapat dikatakan bahwa sistem keseluruan yang diharapkan peneliti untuk dapat membaca jarak dan kecepatan pada sistem Koper Follow Me Beroda dengan hanya menggunakan 1 kamera sudah tercapai.
-
V. Kesimpulan
Berdasarkan penelitian dalam jurnal dan mendapatkan hasil sedemikian rupa, dapat diambil kesimpulan sebagai berikut:
-
1. Dalam penggunaan Markers pada sistem menggunakan Markers tipe ArUco Original dengan ukuran 50 mm2 yang memilki jarak pembacaan minimal 74 mm dan maksimal 2170 mm;
-
2. Kesalahan(error) dalam pembacaan Markers memilki nilai rata – rata sebesar 0,55 %;
-
3. Jarak didapatkan dengan menggunakan rumus segitiga pitagoras. akar dua dari sisi miring kuadrat dikurangi sisi tinggi kuadrat;
-
4. Kecepatan didapat dari perubahan jarak yang dibagi oleh waktu pembacaan perubahan jarak. Apabila tidak ada perubahan jarak maka kecepatan yang dihasilkan bernilai 0 mm/s. Sehingga nilai kecepatan bergantung pada perubahan jarak yang terbaca oleh sistem.
-
5. Sistem keseluruan dapat membaca jarak dan kecepatan pada sistem Koper Follow Me Beroda dengan 1 kamera sudah tercapai.
-
VI. Referensi
-
[1] KBBI Definisi Koper
-
[2] Sari, Anita dan Ramdan, Sigit Doni. 2021. Pengembangan Koper Pintar Berbasis Arduino. Jurnal Teknik Komputer dan Teknik Elektro Universitas Teknokrat Indonesia.
[3] Listiana. Reni, Damayanti. Eva, Prasetyo. Hadi dan Amirullah, Akbar. 2021. Rancang Bangun Koper Pintar Berbasis Mikrokontroller. Jurnal Politeknik TEDC Bandung.
-
[4] Jatmiko, Wisnu dkk. 2012. Robotika : Teori dan Aplikasi. Fakultas Ilmu Komputer Universitas Indonesia.
-
[5] (2021) Camera Module. [Online]. Available:
https://www.raspberrypi.org/documentation/hardware/camera/.
-
[6] Pramono, Basworo Ardi. Hendrawan, Aria. Daru, April Firman. 2018. Raspberry Pi Dengan Modul Kamera dan Motion Sensor Sebagai Solusi CCTV Lab FTIK UNIV. Semarang. Jurnal Fakultas Teknologi Informasi & Komunikasi Universitas Semarang.
-
[7] Eriyani, Vina. Triyanto, Dedy. Nirmala, Irma. 2018. Rancang Bangun Robot Pelayan Restoran Otomatis Berbasis Mikrokontroler Atmega16 Dengan Navigasi Line Follower. Jurnal. Jurusan Rekayasa Sistem Komputer, Fakultas MIPA Universitas Tanjungpura.
-
[8] Sutono. Nursoparisa, Asri. 2019. Perancangan Sistem Kendali Automatisasi Control Debit Air pada Pengisian Galon Menggunakan Modul Arduino. Jurnal Fakultas Teknik Universitas Suryakancana.
-
[9] Hamid, Riskha Mirandha. Rizky. Amin Mohamad. Bagus, Ida. 2016. Rancang Bangun Charge Baterai untuk Kebutuhan UMKM. Jurnal Teknik Elektronika dan Teknik Mesin Politeknik Negeri Balikpapan.
-
[10] Listianto, Rio Dwi. Sunardi. Puriyanto, Riky Dwi. 2019. Monitoring Tegangan Baterai Lithium Polymer pada Robot Sepak Bola Beroda secara Nirkabel. Jurnal Program Studi Teknik Elektro, Universitas Ahmad Dahlan.
-
[11] Ardyanto, B. 2019. Pengukuran Tegangan, Arus dan Daya Listrik Menggunakan Perangkat Telepon Pintar.
-
[12] Tarmizi, Nurma Aula. 2019. Sistem Pengaturan Kecepatan Airan Keluaran Tangki Air Menggunakan Kontroler PID Dilengkapi Sistem Monitoring Berbasis IOT. Jurnal Teknik Elektronika Politeknik Negeri Malang.
-
[13] Tanaya, Zhafir Afif Dwi. Nurcahyo, Sidik. Priyadi, Bambang. 2021. Sistem Peringatan dan Monitoring Jumlah Pengunjung Pada Ruangan Dalam Rangka Physical Distancing Berbasis IoT. Jurnal Teknik Elektronika Politeknik Negeri Malang.
-
[14] (2021) Detection of ArUco Markers. [Online]. Available: https://docs.opencv.org/3.4/d5/dae/tutorial_ArUco_detection.html
-
[15] Supriyanto, Hadi. Afifah, Nur. Budiyarto, Aris. 2019. Sistem Kendali Quadcopter Melalui Jaringan Internet Berbasis Lokasi dan Pengenalan Marker Menggunakan Smartphone. Jurnal Jurusan Teknik Otomasi anufaktur dan Mekatronika, Politeknik Manufaktur Bandung.
-
[16] Fathoni. 2016. Rancang Rangkaian H-Bridge untuk Motor DC 12 V 5 A. Jurnal Politeknik Negeri Malang.
-
[17] Salsabila, Azhaar. Parastiwi, Andriani. Safitri, Hari Kurnia. 2021. Sistem Monitoring dan Controlling Emisi Gas Amonia di Kandang Pembesaran Ayam Pedaging Dengan Metode PID Berbasis Internet of Things. Jurnal Teknik Elektronika Politeknik Negeri Malang.
-
[18] Pratiwi, Syaidinati Hakiki Angesti. 2020. Implementasi Kontrol Proposional Integral Pada Pengaturan Kecepatan Putar Motor DC Untuk Meningkatkan Produksi Kue Kecik. Jurnal Teknik Elektronika Politeknik Negeri Malang.
-
[19] Febrianto, Ronaldo. Priyadi, Bambang. Singgih, Hariyadi. 2021. Pengatur Kecepatan Motor DC Hight Torque Untuk Sistem Pengontrol Tekanan Pada Proses Pencetakan Filament (3D Printing) Berbahan Daur Ulang Dengan Metode PID. Jurnal Teknik Elektronika Politeknik Negeri Malang.
-
[20] Fahmizal. Fathuddin, Fahmy. Susanto, Rudi. 2018. Identifikasi Sistem Motor DC danKendali Linear Quadratic Regulator Berbasis Arduino-Simulink Matlab. Jurnal Departemen Teknik Elektro dan Informatika, Sekolah Vokasi, Universitas Gadjah Mada.
-
[21] Henriques, Pedro Paulo de Jesus Costa. Agung, I. G. A. P. Raka. Jasa, Lie. 2018. Rancang Bangun Sensor Jarak sebagai Alat Bantu Memarkir Mobil berbasiMikrokontroler Arduino Uno. Jurnal Teknik Elektro dan Komputer Fakultas Teknik Universitas Udayana,
-
[22] Al-Fani, Handri. Sumarno. Jalaluddin. Hartam, Dedy dan Gunawan, Indra. 2020. Perancangan Alat Monitoring Pendeteksi Suara di Ruangan Bayi RS Vita Insani Berbasis Arduino Menggunakan Buzzer. Jurnal SMIK Budida.
ISSN 1693 – 2951
Ratna Ika Putri : Desain Inverter Full-Bridge …
Discussion and feedback