Rancang Bangun Robot 6WD Sebagai Alat Pemantau Kebocoran Gas Berbahaya Berbasis Komunikasi Wireless XBee-PRO Series1 60mW
on
Swamardika et.all : Rancang Bangun Robot 6WD Sebagai Alat Pendeteksi Kebocoran Gas Berbasis Komunikasi Wireless 52
XBee-PRO Series1 60mW 2015
Rancang Bangun Robot 6WD Sebagai Alat Pendeteksi Kebocoran Gas Berbasis
Komunikasi Wireless XBee-PRO Series1
60mW
Ida Bagus Alit Swamardika, I Nyoman Budiastra, I Nyoman Setiawan, Made Yogi Hendrayanto, I Putu Adinata Mas Pratama
Abstract— Perkembangan aplikasi teknologi robotika berbasis sistem control dan kecerdasan buatan di bidang industri, pendidikan, maupun kehidupan sehari-hari sangat pesat. Teknologi robotika dikembangkan pada dasarnya bertujuan untuk membantu manusia dalam melakukan pekerjaan tertentu, seperti pekerjaan yang membutuhkan ketelitian tinggi, berisiko tinggi, maupun pekerjaan yang berulang-ulang dan monoton. Pada industri kimia, sering terjadi kebocoran gas pada pipa yang berada dilorong bawah tanah. Menyulitkan para pekerja untuk mencari titik dimana letak kebocoran gas. Untuk mencari tahu titik kebocoran gas dan robot memiliki kemampuan mendeteksi aroma gas, sehingga titik kebocoran bisa ditemukan. diperlukan Robot Beroda 6WD dan sensor gas.
Hasil yang dicapai pada penelitian ini adalah, robot dapat mendeteksi keberadaan gas butane dan CO menggunakan sensor TGS2600. Selain itu, pengiriman informasi dari robot ke software interface menggunakan Xbee. Sehingga operator robot dapat memantau kondisi dan Pengiriman informasi gambar dari robot ke operator melalui saluran S-video kemudian melakukan pengiriman gambar dari kamera.
-
I. Pendahuluan
Perkembangan teknologi khususnya dibidang teknologi robotika saat ini berkembang dengan sangat pesat dilihat dari banyaknya pengaplikasian teknologi robotika berbasis system control dan kecerdasan buatan dalam bidang industri, pendidikan, maupun kehidupan sehari-hari. Teknologi robotika dikembangkan pada dasarnya bertujuan untuk membantu manusia dalam melakukan pekerjaan tertentu, seperti pekerjaan yang membutuhkan ketelitian tinggi, berisiko tinggi, maupun pekerjaan yang berulang-ulang dan monoton.
Pada industri kimia, sering terjadi kebocoran gas pada pipa yang berada di lorong bawah tanah. Hal ini menyulitkan para pekerja untuk mencari tahu di titik mana letak kebocoran gas. maka dirasa perlu untuk membuat sebuah robot yang mampu untuk menjelajah lorong bawah tanah dan memiliki kemampuan mendeteksi kekuatan aroma gas, sehingga titik kebocoran bisa ditemukan.
Salah satu bentuk pengaplikasian dari teknologi robotika yang sesuai dengan kondisi lorong bawah tanah adalah robot yang memiliki kombinasi Lengan Robot dan Robot Beroda 6WD. Karena robot dengan desain tersebut dapat menjelajah
pada kondisi permukaan yang tidak datar dan memiliki kemampuan untuk menyeimbangkan diri.
-
II. Kajian Pustaka
Adapun kajian pustaka yang melandasi dan mendukung penelitian ini meliputi pustaka-pustaka berikut:
-
1. Mikrokontroler ATmega 32
-
2. Modul Wireless XBee-PRO
-
3. Sensor IMU (Inertial Measurement Unit)
-
4. Sensor Gas TGS2600
-
5. Sensor Infrared
-
6. Dagu Wild Thumper Controller
-
7. Microsoft Visual C# 2012
-
2.1 Mikrokontroler ATmega 32
AVR merupakan seri mikrokontroler Complementary Metal Oxide Semiconductor (CMOS) 8-bit buatan Atmel berbasis arsitektur RISC (Reduced Instruction Set Computer). Konfigurasi PIN AVR ATmega dapat dilihat pada Gambar 1.
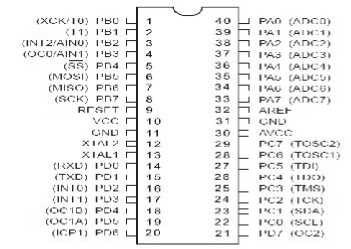
Gambar 1. Konfigurasi PIN AVR ATmega 32 [1]
-
2.2 Komunikasi Serial USART
USART singkatan dari (Universal Syncronous Asyncronous Receiver/ Transmiter). Perancangan dan pembuatan hardware sistem kendali mobile robot jarak jauh menggunakan Wireless XBee-PRO berbasis mikrokontroler AVR ATmega32. Ilustrasi komunikasi USART antara mikrokontroler ATmega32 dengan XBee-PRO dapat dilihat pada Gambar 2.
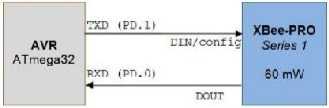
Gambar 2. Ilustrasi interface mikrokontroler dengan XBee-PRO [2]
-
2.3 Modul Wireless XBee-PRO
XBee-PRO merupakan modul yang memungkinkan mikrokontroler untuk berkomunikasi secara wireless dengan standar protokol ZigBee. ZigBee beroperasi pada spesifikasi IEEE 802.15.4 radio fisik dan beroperasi pada band berlisensi yaitu 2.4 GHz, 900 MHz dan 868 MHz. modul XBee PRO akan membebani dengan arus sebesar 250 mA pada pengiman data (Tx) dan arus 50 mA untuk penerimaan data (Rx) dengan jangkuan : 100 meter (indoor), 1500 meter (outdoor). [3]
-
2.4 Sensor Gas TGS 2600
Bahan detector dari sensor gas adalah metal oksida, khususnya senyawa SnO2. TGS sensor mempunyai sebuah tahanan sensor yang nilainya bergantung pada konsentrasi oksigen yang bereaksi dengan Kristal metal oksida (SnO2). TGS 2600 memiliki sensitivitas yang tinggi untuk konsentrasi rendah, gas udara yang terkontaminasi seperti hydrogen dan karbon monoksida. Sensor ini dapat mendeteksi hydrogen pada tingkat beberapa ppm. Konfigurasi Pin Sensor TGS2600 dapat dilihat pada Gambar 4.
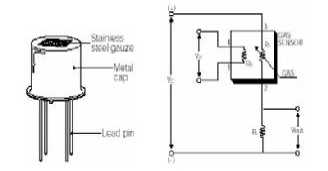
Gambar 3. Konfigurasi Pin Sensor TGS2600 [4]
-
2.5 InfraRed
Infra merah (Infrared) adalah radiasi sinar elektromagnetik dengan panjang gelombang sekitar 700nm sampai dengan 1mm dengan arus maksimal 100mA. Sehingga panjang gelombang infra merah lebih panjang dari cahaya tampak, tetapi lebih pendek dari radiasi gelombang radio. Dengan panjang gelombang ini maka cahaya dari infra merah tidak akan tampak oleh mata namun radiasi dan panas yang dihasilkan oleh infra merah masih sangat terasa atau terdeteksi. Bentuk fisik Adjustable Sensor Infrared dapat dilihat pada Gambar 5.

Gambar 4. Bentuk Fisik Adjustable Sensor Infrared [5]
-
2.6 Dagu Wild Thumper Controller
Dagu wild thumper controller adalah sebuah driver motor dual H-Bridge yang dilengkapi dengan mikrocontroller atmega 168 yang dikemas kedalam arduino nano. Controller ini berfungsi untuk mengatur putaran motor dari robot 6 WD terdapat inputan yang dapat digunakan langsung dari receiver remote. Pin tersebut adalah D1 dan D0 seperti yang terlihat pada Gambar 6.[6]
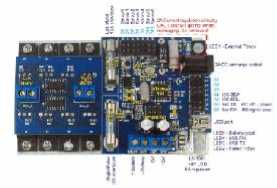
Gambar 5. Dagu Wild Thumper Controller
-
2.7 Microsoft Visual C# 2012
Pada tahun 2000, Microsoft meluncurkan bahasa pemrograman baru yang diberi nama C# programming language. C# dikembangkan oleh tim yang dipimpin Andreas Hejlsberg dan Scott Wiltamuth. C# memiliki kesamaan dengan bahasa C,C++ dan Java.[7]
-
III. Metodologi Penelitian
-
3.1 Langkah – langkah penelitian
-
Langkah-langkah penelitian yang akan dilakukan adalah sebagai berikut :
-
1. Pendefinisian permasalahan dari aplikasi yang ingin.
-
2. Pengumpulan data yang berhubungan dengan perancangan robot 6wd (prototype) sebagai alat pemantau jarak jauh kawasan bencana berbasis komunikasi wireless xbee-pro Series1 60 mW melalui studi literatur.
-
3. Pemahaman proses-proses untuk pemodelan sistem perangkat lunak dan perancangan perangkat keras dalam pembuatan sistem kendali lengan robot dan mobile robot 6WD.
-
4. Perancangan dan realisasi perangkat keras, baik itu secara skematik maupun layout PCB, menggunakan software Eagle 6.0.
-
5. Melakukan pengujian di setiap perangkat keras.
-
6. Melakukan perancangan perangkat lunak, program sesuai dengan apa yang direncanakan dalam menunjang sistem kendali mobile robot 6WD yaitu dengan membuat alur algoritma program (Flowchart).
-
7. Melakukan realisasi perangkat lunak menggunakan bahas pemrograman Basic Compiler (Bascom IDE), pembuatan program rangkaian Tx dan Rx pada sistem kendali.
-
8. Melakukan pembuatan software interface penampil data.
-
9. Melakukan pengujian koneksi komputer dengan perangkat keras, apakah sudah berjalan dengan baik antara perangkat keras dengan komputer dapat mengirimkan data melalui downloader.
-
10. Menyiapkan dan melakukan pengujian di dalam ruangan pada gedung Di Laboratorium Jurusan Teknik Elektro dan halaman luar untuk mengetahui kemampuan komunikasi wireless XBee-PRO dalam mengirimkan dan menerima data.
-
11. Menyiapkan dan melakukan pengujian di luar ruangan, pengujian dilakukan dalam dua kondisi yaitu terdapat halangan dan pengujian tanpa halangan mengetahui kemampuan komunikasi wireless XBee-PRO dalam mengirimkan dan menerima data.
-
12. Melakukan pengujian fungsi 6WD pada permukaan yang berbatu dan lembab.
-
13. Menguji gambar yang ditangkap oleh kamera, kemudian dikirimkan oleh robot ke operator.
-
14. Menguji software interface sebagai penampil data, serta lamp indicator halangan.
-
15. Mengambil kesimpulan.
-
3.1 .1 Perangkat Keras
Dalam perancangan perangkat keras pada rancang bangun robot 6wd (prototype) sebagai alat pemantau jarak jauh kawasan bencana berbasis komunikasi wireless xbee-pro Series1 60 mW ini, menggunakan beberapa Bahan:
Bahan yang digunakan dalam perancangan perangkat keras antara lain :
-
1. Mikrokontroler ATmega32 sebagai komponen utama dalam pengolah data dari sensor dan mengirimkan ke computer.
-
2. Modul komunikasi Wireless XBee-PRO sebagai pengirim dan penerima data instruksi.
-
3. Sensor Gas TGS 2600 sebagai sensor utama dalam penelitian ini.
-
4. Baterai Linier Polymer Nanotech 3Cell 2200 mAh dan 3Cell 1000 mAh.
-
5. Adjustable Infrared sensor sebagai pendeteksi obyek.
-
6. Kamera wireless B-Pro 5.
-
7. Sensor keseimbangan IMU
-
8. Radio Telemetry sebagai pengirim gambar dari kamera ke computer.
-
9. Komponen-komponen elektronika, kabel, PCB (Printing Circuit Board), timah dan konektor.
-
10. 6 buah roda offroad mini.
-
11. 6 buah motor DC Gear box (75:1).
-
12. 2 buah chasis aluminium Driling.
-
3.1 .2Perangkat Lunak
Perancangan robot 6wd (prototype) sebagai alat pemantau jarak jauh kawasan bencana berbasis komunikasi wireless xbee-pro Series1 60 mW ini menggunakan bahasa pemrograman Basic Compiler dengan standar bahasa pemrograman mikrokontroler AVR. Berikut ini beberapa software pendukung antara lain :
-
1. Eagle 6.0 digunakan untuk membuat skema rangkaian yang dibuat.
-
2. X-CTU digunakan untuk mengatur konfigurasi pada XBee.
-
3. Adobe Photoshop digunakan untuk mengedit gambar hasil pengujian.
-
4. Microsoft Visual Studio 2012
-
5. Arduino IDE
-
6. Bascom AVR
-
3.2 . Perancangan Perangkat Keras
-
3.2.1 . Gambaran Umum Sistem
-
Adapun gambaran umum sistem adalah sebagai berikut:
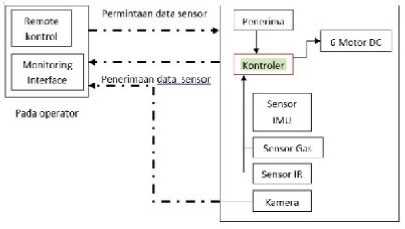
Gambar 6. Blok Diagram Sistem
-
3.2.2 Gambaran Desain Rancangan
Gambar dari desain robot yang akan dibuat dapat dilihat pada gambar berikut.
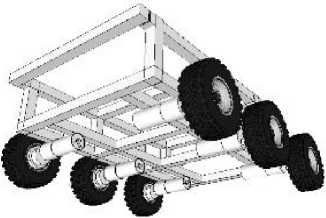
Gambar 7. Desain Rangka Robot
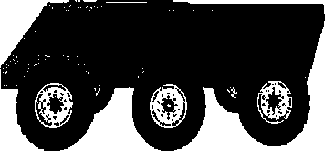
Gambar 8. Desain Robot Keseluruhan
-
3.2.3 Perancangan Rangkaian Mikrokontroler Atmega 32
Perancangan rangkaian mikrokontroler Atmega 32 menggunakan software Eagle 6.0. Adapun perancangan skema mikrokontroler Atmega 32 adalah sebagai berikut:
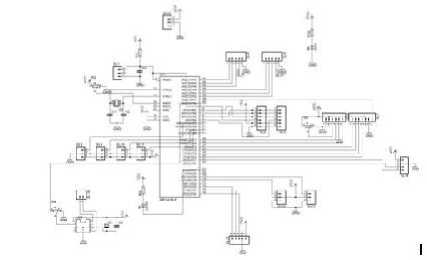
Gambar 9. Perancangan Skema Rangkaian Mikrokontroler
Atmega32
Realisasi hasil perancangan Robot 6WD (Prototype) Sebagai Alat Pemantau Kebocoran Gas Berbahaya Berbasis Komunikasi Wireless XBee-PRO Series1 60 mW adalah sebagai berikut :
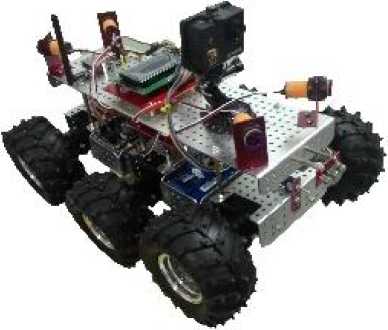
Gambar 10. Hasil Realisasi Robot 6WD Sebagai Pendeteksi Kebocoran Gas
Tabel I
Spesifikasi Robot 6WD Sebagai Pendeteksi Gas
|
No |
Spesifikasi |
Robot |
|
1 |
Tinggi |
25 cm |
|
2 |
Panjang |
42 cm |
|
3 |
Lebar |
30 cm |
|
4 |
Berat |
4,2 kg |
|
5 |
Baterai Motor |
7,4 VDC 2,2A |
|
6 |
Baterai Mikrokontroler |
11,2 VDC 1A |
|
6 |
Mikrokontroler |
ATmega32 |
|
7 |
Tipe Sensor Gas |
TGS2600 |
|
8 |
Jumlah Sensor Gas |
3 Depan, 3 Belakang |
|
9 |
Tipe Penggerak |
6WD |
-
4.2 Hasil Realisasi dan Pengujian Rangkaian Mikrokontroler
Pada pengujian hasil perancangan rangkaian mikrokontroler bertujuan untuk mengetahui, apakah rangkaian mikrokontroler ini sudah siap untuk digunakan. Pengujian rangkaian mikrokontroler ini adalah sebagai berikut:

Gambar 11. Pengujian Rangkaian Mikrokontroler Atmega 32 dengan Merubah Settingan Fuse Bit
-
4.3 Hasil Realisasi dan Pengujian Rangkaian Komunikasi Xbee dengan Software XCTU

Gambar 12. Pengujian Xbee Menggunakan XCTU
Pada gambar tersebut, dapat dilihat bahwa Xbee terkoneksi dengan Com Port 5 dangan Baud rate data transfer Receive 9600. Pada configurasi tersebut juga terdapat Mac address Default yang dikeluarkan oleh software XCTU secara acak. Pada koneksi ini Mac address yang didapatkan adalah : 0013A200409EDD67
-
4.4 Hasil Realisasi dan Pengujian Rangkaian Sensor
TGS2600
Pengujian rangkaian sensor TGS2600 bertujuan untuk mengetahui apakah sensor sudah dapat mendeteksi gas dengan baik atau tidak. Pengujian ini digunakan gas dari korek api pematik yaitu gas butana dan asap pembuangan motor yaitu CO. Jika sensor sudah terasa hangat, maka dapat dipastikan heater sensor sudah bekerja. Berikut ini adalah data nilai sensor TGS2600 diberikan gas butana dan gas CO:

Gambar 13. Pengujian Sensor TGS2600 Sebelum Diberikan Gas Butana
Pada gambar 8 diatas terlihat tulisan “Front Sen= 53”, “Back Sen= 85” dan jenis gas “Idle”. Data tersebut menunjukan
bahwa keadaan normal. Tidak dideteksi gas yang termasuk ke dalam tipe gas yang dicari.
Tabel II
Hasil nilai pembacaan sensor TGS26
|
Pengujian |
Jeni s Gas |
Durasi Pengujia n |
Nilai Hasil Pembacaan Sensor |
Durasi kembali ke nilai Normal |
|
1 |
Gas But ana |
5 detik |
800-815 |
2 menit 12 detik |
|
10 detik |
810-840 |
3 menit 20 detik | ||
|
15 detik |
824-834 |
3 menit, 5 detik | ||
|
2 |
Gas Co |
5 detik |
850-872 |
1 menit, 19 detik |
|
10 detik |
870-877 |
1 menit, 23 detik | ||
|
15 detik |
870-873 |
1 menit, 11 detik |
NB. Nilai normal pembacaan sensor TGS2600 adalah 50-60

Gambar 14. Pengujian Sensor TGS2600 Diberikan Gas Butana (menggunakan korek gas)

Gambar 15. Pengujian Sensor TGS2600 Diberikan Gas CO (menggunakan asap pembuangan motor)
-
4.5 Pengujian Sensor Infrared
Pada pengujian sensor infrared disini menggunakan halangan yaitu tangan. Ketika sensor tidak mendeteksi adanya halangan, maka lampu led indicator yang ada pada bodi sensor tidak menyala. Begitu pula sebaliknya, ketika sensor mendeteksi adanya halangan, maka lampu indicator yang ada pada bodi sensor akan menyala. Berikut gambar hasil pengujian sensor infrared.

Gambar 16. Pengujian Sensor InfraRed Dengan Kondisi Tanpa Halangan

Gambar 17. Pengujian Sensor InfraRed Dengan Kondisi Ada Halangan (Tangan)
-
4.6 Hasil Realisasi dan Pengujian Software Interface
Pembuatan software interface ini menggunakan Microsoft Visual C# 2012. Hasil realisasi pembuatan software interface adalah sebagai berikut:

Gambar 18. Hasil Realisasi Software Interface
Adapun spesifikasi dari software interface 6WD Gas Tracker ini adalah sebagai berikut:
-
1. Memiliki 1 buah Horizon Avionics Instrument Control yang berfungsi untuk menampilkan kondisi dari robot 6WD.
-
2. Memiliki Panel Serial yang berfungsi untuk mengkonfigurasi Com Port yang akan digunakan.
-
3. Panel data Monitoring yang terdiri dari 4 buah lamp indicator. Fungsi dari lamp indicator ini ketika robot mendeteksi halangan, jadi ketika sensor infrared membaca adanya halangan, maka warna lamp indicator akan berubah menjadi hijau. Selain lamp indicator, pada panel data monitoring juga terdapad 2 textbox yang berfungsi untuk menampilkan data sensor TGS2600.
-
4. Memiliki Richtextbox data coming yang berfungsi untuk menampilkan data yang masuk sesuai dengan jeda waktu yang telah ditentukan oleh timer pada program.
-
5. Memiliki textbox data now yang berfungsi untuk menyaring data yang ada pada data coming untuk di pilah-pilah sebelum dimasukan ke masing-masing panel.
-
6. Memiliki textbox line yang berfungsi untuk menampilkan jumlah line data yang telah dikirim oleh komunikasi serial.
-
7. Terdapat juga textbox gas type yang bertujuan untuk memberikan informasi jenis gas yang dideteksi oleh robot.
Pengujian Software Interface ketika belum mendeteksi adanya Gas

Gambar 19. Pengujian Software Interface ketika Belum Mendeteksi Gas
Pengujian Software Interface ketika sudah mendeteksi adanya Gas

Gambar 20. Pengujian Software Interface ketika Sudah Mendeteksi Gas
-
4.7 Pengujian Command Control Remote Ke Robot
Pada pengujian command control dari remote control yang digunakan untuk dapat menggerakan robot adalah remote 6 ch dengan frekwensi 2,4 Ghz. Adapun pembagian dari chanel-chanel tersebut adalah sebagai berikut:
-
1. Aileron = berfungsi untuk menggerakan robot ke kanan dan kekiri
-
2. Elevator = berfungsi untuk menggerakan robot maju dan mundur
-
3. Throtle = berfungsi untuk menambah daya dari robot (Transmisi)
-
4. Rudder = berfungsi untuk dapat menggerakan robot berputar
-
5. Aux1 = dapat difungsikan opsional
-
6. Aux2 = dapat difungsikan opsional
Namun pada penelitian ini, channel yang digunakan hanya 2 saja, yaitu Aileron dan Throtle.
Berikut ini adalah gambar pengujian command control stick dari remote.

-
2. Komunikasi data xbee sudah dapat dilakukan dengan baik, sehingga operator dapat memantau data yang dikirimkan oleh robot melalui software interface.
-
5.2 Saran
Adapun saran yang dapat disampaikan adalah sebagai berikut:
Remote control yang sekarang digunakan, nantinya dapat diganti menggunakan piranti cerdas sejenis smartphone. Terkoneksi melalui saluran wifi ataupun Bluetooth yang sudah tersedia pada smartphone. Apabila memungkinkan, dapat menggunakan jalur sms getway untuk dapat berkomunikasi jarak jauh dengan robot.
-
VI. Daftar Pustaka
[1]Atmel. 2011. ATmega32/L datasheet. www.atmel.com/Images.jpg/doc2503.pdf. Diakses tanggal 5 Juni 2015.
{kind=link}
-
[2] Ardika, K.2013. Perancangan Sistem Kendali Mobile Robot Jarak Jauh Menggunakan Wireless XBee-PRO Series 1 60mw Berbasis Mikrokontroller ATmega32. (Skripsi). Bali : Program Sarjana Universitas Udayana.
-
[3] Digi Co. 2005. XBee® &XBee-PRO® 802.15.4 OEM RF Modules.
http://www.cytron.com.my/datasheet/WirelessDevic e/manual_xb_oemrfmodules_802.15.4.pdf. Diakses tanggal 23 Mei 2015
-
[4] Figaro UsaTM. (t.t). TGS 2600 For The Detection Of Air Contaminants.
http://www.figarosensor.com/products/2600pdf.pdf. Diakses tanggal 10 Juni 2015.
-
[5] Robotshop (t.t). DFRobot Adjustable Infrared Sensor Switch. www.robotshop.com/en/dfrobot-adjustable-infrared-sensor-switch.html. Diakses tanggal 20 Mei 2015
-
[6] Sparkfun (t.t). Wild Thumper Controller Board. www. Sparkfun.com/ product/retired/11057. Diakses tanggal 20 Mei 2015.
-
[7] Sianipar, R.H. 2014. Pemrograman Visual C#. Bandung: Informatika
Gambar 21. Pengujian Command Control dari Remote ke Robot
V. Kesimpulan
5.1 Kesimpulan
Adapun kesimpulan yang dapat diberikan adalah sebagai berikut:
1. Pendeteksian gas sudah dapat dilakukan.
1693-2951©2015 JTE
Discussion and feedback