Rancang Bangun Vacuum Cleaner Dengan Pengendali Nirkabel Menggunakan Modul Rf Data Transceiver Ys-1020ub Berbasis Mikrokontroler At89s52
on
Rancang Bangun Vacuum ...
I GAP Raka Agung, Made Sudiana
RANCANG BANGUN VACUUM CLEANER DENGAN PENGENDALI NIRKABEL MENGGUNAKAN MODUL RF DATA TRANSCEIVER YS-1020UB BERBASIS MIKROKONTROLER AT89S52
I Gusti Agung Putu Raka Agung, Made Sudiana
Jurusan Teknik Elektro Fakultas Teknik Universitas Udayana Kampus Bukit Jimbaran Bali, 80361, tlp. 0361703315
Email: igapraka@yahoo.co.id
Abstrak
Kebersihan merupakan hal yang sangat penting untuk menjaga kesehatan kita, khususnya kebersihan rumah. Rumah yang bersih sangat mempengaruhi kesehatan para penghuninya. Debu adalah kotoran yang paling sering mengotori rumah kita terutama pada bagian lantai. Setiap hari kita harus membersihkan rumah dari debu yang ada pada lantai untuk menjaga kebersihan sekaligus kesehatan kita. Dalam membersihkan lantai rumah dari debu sering menyita banyak waktu dan tenaga. Vacuum cleaner terkendali nirkabel menggunakan Modul RF Data Transceiver YS-1020UB berbasis mikrokontroler AT89S52 merupakan salah satu solusi untuk membersihkan lantai rumah dari kotoran debu. Vacuum cleaner ini menggunakan enam buah motor DC yaitu dua motor DC penyedot debu, dua motor DC penentu arah maju, mundur, belok kanan, dan belok kiri, serta dua motor DC penentu arah geser kanan dan geser kiri. Vacuum cleaner ini dapat dikendalikan dengan dua mode operasi yaitu mode manual dan otomatis. Pada mode manual vacuum cleaner ini dikendalikan menggunakan remote control, dengan tranmisi nirkabel memakai transceiver YS-1020UB. Sedangkan pada mode otomatis vacuum cleaner ini menggunakan empat buah sensor jarak untuk menghindari tabrakan pada dinding. Vacuum cleaner dengan pengendali nirkabel menggunakan modul RF Data Transceiver YS-1020UB berbasis mikrokontroler AT89S52 sudah bisa membersihkan debu lantai sehingga lantai bersih dari debu.
Kata Kunci: debu, mikrokontroler AT89S52, remote control, mode manual
Vacuum cleaner yang akan direalisasikan menggunakan pengendali nirkabel sehingga bisa dikendalikan dari jarak yang jauh dan dapat digunakan membersihkan lantai dimana saja sepanjang bisa dijangkau oleh pengendali nirkabel ini. Vacuum cleaner ini dikendalikan dengan remote control menggunakan modul RF Data Transceiver YS-1020UB terdiri yang dari enam perintah yaitu maju mundur, kiri kanan, menghidupkan dan mematikan mesin penyedot debu. Vacuum cleaner akan bekerja sesuai dengan data digital yang diterima dari enam tombol perintah yang ditekan pada remote control. Debu dan kotoran sejenisnya yang terdapat di lantai akan disedot dan dibersihkan untuk kemudian ditampung di dalam tabung penampung. Vacuum cleaner ini juga dapat bekerja secara otomatis. Mode otomatis ini bekerja pada luasan yang terbatas dengan menggunakan empat buah sensor jarak untuk menghindari tabrakan dengan penghalang di sekitarnya.
AT89S52 adalah mikrokontroler CMOS 8 bit tampilan bagus, daya rendah dengan 8 K byte insystem programmable Flash memory. Piranti ini dibuat memakai memori nonvolatil kerapatan tinggi dari Atmel dan kompatibel dengan standar industri
pinout dan set intruksi 80C51. Flash on-chips memungkinkan memori program diprogram kembali in-system atau memakai programmer memori nonvolatil biasa. Kombinasi CPU 8 bit yang canggih dengan pemrograman flash in-system pada chip tunggal, menjadikan Atmel AT89S52 sebagai mikrokontroler berdaya guna yang memberikan solusi yang fleksibel dan efektif untuk beberapa penerapan kendali embedded.[1]
Mikrokontroler AT89S52 memilki ciri standar seperti 8 Kbyte Flash, 256 byte RAM, 32 I/O line, timer watchdog, dua data pointer, tiga buah 16 bit timer atau counter, enam vektor interupt dua level, sebuah serial port full duplex, osilator on chip dan rangkain clock. Sebagai tambahan, mikrokontroler AT89S52 dirancang dengan logika statis untuk operasi penurunan frekuensi sampai frekuensi nol dan mendukung dua mode penghematan daya yang dapat dipilih secara software. Mode idle yang menghentikan CPU dengan membiarkan RAM, timer/counter, port serial dan sistem interupsi untuk terus berfungsi. Mode daya rendah (power down) menyimpan isi RAM namun membekukan osilator, mendisabel semua fungsi-fungsi chip lainnya sampai ada interup berikut atau reset secara hardware.[1].
Fotodiode semikonduktor dapat beroperasi sebagai fotokonduktor atau sebagai piranti fotovoltaik tergantung pada rangkaian luar. Apabila
sambungan P/N dari fotodiode dalam gambar 1a diiluminasi dan dibuat hubungan bias nol, dibuat pada kedua sisi dari sambungan (tidak dipakai tegangan luar) maka, aliran arus sebanding dengan intensitas cahaya. Kelakuan ini diketahui sebagai efek fotovoltaik yang dipakai di dalam sel surya untuk mengubah cahaya ke tegangan untuk suplai tenaga surya (solar).
Apabila sambungan P/N diletakkan dalam rangkaian dengan memakai bias balik luar, seperti pada gambar 1b, dan diiluminasi maka akan terjadi aliran arus. Arus terdiri dari dua bagian yaitu arus gelap disebabkan oleh kebocoran (leakage) balik, yang tetap konstan, dan foto arus yang linier dengan intensitas sinar yang datang [2].
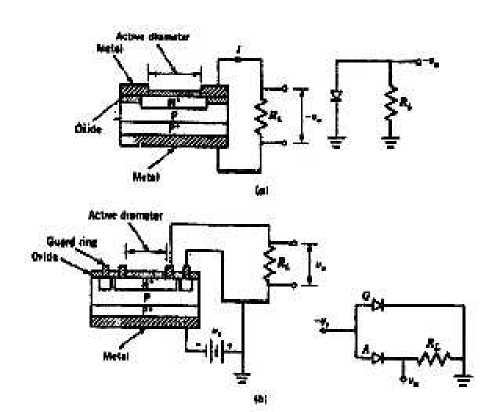
Gambar 1(a). Rancangan fotodiode untuk operasi bias nol. (b) Rancangan fotodiode dengan bias negatif [2]
Op amp banyak digunakan untuk pengubah tegangan (amplitudo dan polaritas), osilator, filter dan rangkaian instrumentasi. Op amp terdiri dari sejumlah besar penguat diferensial untuk mendapatkan penguatan tegangan yang besar [3].
Berikut ini adalah karakteristik dari Op Amp ideal [3]:
-
1. Penguatan tegangan lingkar terbuka (open-loop voltage gain) AVOL = - ∞
-
2. Tegangan ofset keluaran (output offset voltage) VOO = 0
-
3. Hambatan masukan (input resistance) RI = ∞
-
4. Hambatan keluaran (output resistance) RO = 0
-
5. Lebar pita (band width) BW = ∞
-
6. Waktu tanggapan (respon time) = 0 detik
-
7. Karakteristik tidak berubah dengan suhu
H – bridge adalah sebuah rangkaian elektronik yang memberikan tegangan pada beban pada salah satu arah. Rangkaian H-bridge biasanya digunakan untuk robotika dan aplikasi lain yang bisa mengatur
putaran motor DC berputar searah jarum jam dan berlawanan dengan arah jarum jam. Istilah H-bridge diperoleh dari gambaran grafik rangkaian secara menyeluruh. Sebuah H-bridge terdiri dari empat saklar seperti pada gambar 2. Ketika saklar S1 dan S4 tertutup dan saklar S2 dan S3 terbuka maka motor akan diberi tegangan positif sehingga motor bergerak searah jarum jam. Dengan membuka saklar S1 dan S4 dan menutup saklar S2 dan S3 maka tegangan akan membalik arah sehingga motor bergerak berlawanan arah dengan putaran jarum jam. Dengan menggunakan perbandingan tersebut, saklar S1 dan S2 harus tidak pernah ditutup pada waktu yang sama, ini akan menyebabkan hubung pendek pada masukan sumber tegangan. Penerapan yang sama juga pada saklar S3 dan S4.[4]
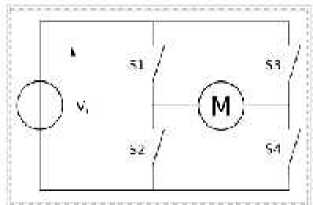
Gambar 2. Rangkaian H-bridge[4]
Susunan rangkaian H-bridge secara umum digunakan untuk membalikkan polaritas motor, tetapi dapat juga digunakan untuk menghentikan motor, dimana dapat membuat motor berhenti cepat atau berhenti secara tiba-tiba dengan menghubung-pendekkan terminal dari motor atau membiarkan motor berputar bebas dengan tidak menghubungkan motor pada rangkaian. Prinsip kerja rangkaian H-bridge seperti pada tabel 1.
Tabel 1. Prinsip Kerja H-bridge[4]
|
No |
S1 |
S2 |
S3 |
S4 |
Hasil |
|
1 |
1 |
0 |
0 |
1 |
Motor berputar ke kanan |
|
2 |
0 |
1 |
1 |
0 |
Motor berputar ke kiri |
|
3 |
0 |
0 |
0 |
0 |
Motor bergerak bebas |
|
4 |
0 |
1 |
0 |
1 |
Motor berhenti berputar |
|
5 |
1 |
0 |
1 |
0 |
Motor berhenti berputar |
Satu keuntungan utama dari motor DC, tapi tidak semuanya adalah muntlak bisa dibolak balik. Penerapan arus pada suatu arah akan memutar motor searah jarum jam dan pemberian arus pada arah lainnya akan memutar motor berlawanan arah dengan jarum jam. Kemampuan ini menyebabkan motor DC sangat cocok untuk pemakaian pada bidang robot, dimana motor sering diinginkan untuk berbalik arah misalnya untuk menjauhkan robot dari penghalang atau untuk menaikkan atau nenurunkan lengan robot. [5].
Sebelum melakukan penelitian, terlebih dahulu dilakukan kajian-kajian yang berkaitan dengan mikrokontroler AT89S52, vaccum cleaner, fotodiode, H bridge dan motor DC. Perancangan dan pengujian dilakukan perblok dilanjutkan dengan simulasi masing-masing blok dan setelah didapat hasil yang diinginkan blok-blok direalisasikan untuk diuji secara keseluruhan dengan program yang telah dibuat.
Gambar 3. adalah diagram blok perangkat keras vaccum cleaner nirkabel terkendali mikrokontroler.
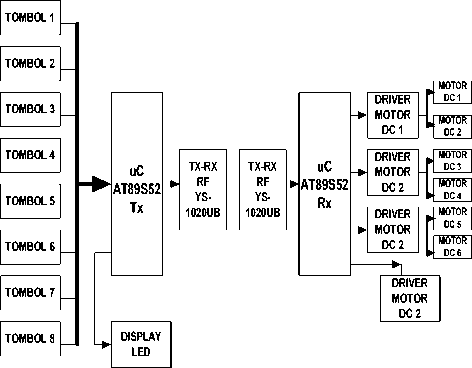
Gambar 3. Diagram blok vacuum cleaner nirkabel
Penjelasan dan fungsi masing – masing blok peralatan vacuum cleaner dengan pengendali nirkabel menggunakan modul RF Data Transceiver YS-1020UB[6] berbasis mikrokontroler AT89S52 adalah sebagai berikut :
-
1. Tombol berfungsi sebagai masukan pada pengirim (remote control) yang akan diolah oleh mikrokontroler untuk dikirimkan ke bagian penerima ( vacuum cleaner). Ada delapan tombol yang digunakan pada remote control yang yang masing - masing tombol dihubungkan ke port 2 mikrokontroler AT89S52. Masing – masing tombol mempunyai fungsi khusus seperti:
-
a. Tombol 1 berfungsi menghidupkan motor ;
-
b. Tombol 2 berfungsi mematikan motor ;
-
c. Tombol 3 berfungsi menghidupkan mode otomatis;
-
d. Tombol 4 berfungsi mematikan mode otomatis;
-
e. Tombol 5 berfungsi menggerakkan maju;
-
f. Tombol 6 berfungsi menggerakkan mundur;
-
g. Tombol 7 berfungsi menggerakkan
samping kanan;
-
h. Tombol 8 berfungsi menggerakkan
samping kiri;
-
2. Tampilan Led berfungsi sebagai indikator saat terjadi penekanan tombol pada bagian pengirim (remote control);
-
3. Mikrokontroler AT89S52 pada bagian pengirim (remote control) berfungsi sebagai pengolah masukan yang kemudian diteruskan ke RF Data Transceiver YS-1020UB;
-
4. Modul RF Data Transceiver YS-1020UB pada bagian pengirim (remote control) berfungsi mengirim data digital dari mikrokontroler pengirim ke mikrokontroler penerima. Modul RF Data Transceiver pengirim dihubungkan ke port P3.1;
-
5. Modul RF Data Transceiver YS-1020UB pada bagian penerima (vacuum cleaner) berfungsi menerima data yang dipancarkan dari bagian pengirim (remote control). Modul RF Data Transceiver penerima dihubungkan ke port P3.0;
-
6. Mikrokontroler AT89S52 pada bagian penerima (vacuum cleaner) berfungsi sebagai pengolah data yang diterima dari pengirim (remote control) kemudian diteruskan ke motor driver motor DC pada port 2 dan tampilan led pada port 0;
-
7. Sensor jarak berfungsi sebagai pengatur jarak untuk menghindari terjadinya tabrakan pada vacuum cleaner terhadap dinding. Sensor jarak mengguna-kan fofodiode dan komparator sebagai pembanding yang dihubungkan pada port 1;
-
8. Driver motor DC berfungsi mengendalikan dan mengatur arah putaran motor DC. Driver motor DC menggunakan IC L293D[7] dan IC L298[8] yang masukannya dihubungkan pada port 2;
-
9. Motor DC 1 dan 2 berfungsi sebagai penyedot debu. Motor DC 1 dan 2 terletak pada bagian penyedot debu yang dilengkapi dengan balingbaling penyedot;
-
10. Motor DC 3 dan 4 berfungsi sebagai penggerak dan penentu arah dari vacuum cleaner. Motor DC 3 dan 4 menentukan arah maju, mundur, kanan, dan kiri;
-
11. Motor DC 5 dan 6 berfungsi sebagai penggerak geser ke samping kanan dan samping kiri pada waktu mode otomatis. Motor DC 5 dan 6 hanya aktif pada saat mode otomatis pada saat mode manual motor DC 5 dan 6 tidak dapat dikendalikan.
Cara kerja peralatan dengan pengendali nirkabel menggunakan Modul RF Data Transceiver YS-1020UB berbasis mikrokontroler AT89S52 seperti pada gambar 3 adalah sebagai berikut.
Pada bagian pengirim (remote control) menggunakan delapan tombol sebagai pengendali, Tombol tersebut terhubung pada delapan port I/O mikrokontroler AT89S52, Apabila ditekan maka led hidup sehingga tombol tersebut berfungsi sebagai input yang berlogika rendah. Input yang diberikan kepada mikrokontroler secara langsung akan diteruskan menuju modul RF data transceiver YS-1020UB untuk mengirimkan data sesuai dengan
tombol yang ditekan. Data ditransmisikan melalui media transmisi udara dengan menngunakan frekuensi pembawa 433 MHz.
Penerima yang juga adalah menerima data yang telah dipancarkan oleh bagian pengirim (remote control). Data kemudian diolah oleh mikrokontroler apakah motor DC yang digerakkan adalah motor DC 1, motor DC 2, motor DC 3, motor DC 4, motor DC 5 atau motor DC 6. Jika motor DC 1 dan motor DC 2 digerakkan maka baling – baling penyedot pada vacuum cleaner akan hidup, apabila motor DC 3 dan motor DC 4 digerakkan maka akan bergerak sesuai dengan perintah dari remote control yaitu maju, mundur, kiri dan kanan. Motor DC5 dan motor DC 6 bergerak pada saat vacuum cleaner pada mode otomatis yaitu bergerak geser ke samping kiri dan samping kanan. Pada saat ruangan yang dibersihkan tidak banyak halangan maka digunakan mode otomatis sehingga sensor jarak dihidupkan untuk menghindari tabrakan dengan dinding. Perancangan dengan pengendali nirkabel menggunakan Modul RF Data Transceiver YS-1020UB berbasis mikro kontroler AT89S52 meliputi beberapa bagian sebagai berikut:
-
1. Perancangan minimum sistem AT89S52.
-
2. Perancangan modul RF Data Transceiver YS 1020UB.
-
3. Perancangan pengendali motor DC.
-
4. Perancangan sensor jarak dengan fotodiode.
-
5. Perancangan bentuk fisik .
Rangkaian mikrokontroler merupakan bagian yang terpenting dari rangkaian keseluruhan karena sebagai pengendali utama semua rangkaian. Sebagai pengendali utama digunakan IC mikrokontroler AT89S52 yang mempunyai empat jenis port yang bisa digunakan sebagai masukan (input) dan keluaran (output). Rangkaian lengkap sistem minimum mikro-kontroler AT89S52 dapat dilihat pada gambar 4.
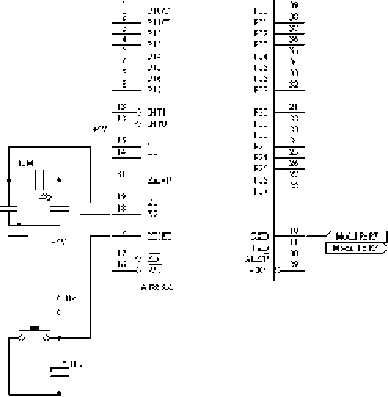
Gambar 4. Rangkaian Minimum Sistem AT89S52
Pada perancangan dengan pengendali nirkabel ini mikrokontroler sebagai pengendali (remote control) berfungsi sebagai pengolah data yang diperoleh dari penekanan tombol dan memancarkan data tersebut melalui port serial (P3.0 dan P3.1) menggunakan modul RF Data Transceiver YS-1020UB. Mikrokontroler penerima berfungsi menerima data dan menentukan apakah motor yang digerakkan adalah motor DC 1, motor DC 2, motor DC 3, motor DC 4, motor DC 5 atau motor DC 6.
Pada bagian pengendali (remote control) port 2 mikrokontroler AT89S52 dihubungkan dengan 8 buah push button. Pada vacuum cleaner port 2 mikrokontroler AT89S52 dihubungkan dengan dua buah IC L293D dan satu buah IC L298 sebagai pengendali arah putaran motor DC. Port 1.0, 1.1, 1.2, dan 1.3 dihubungkan dengan IC Op Amp LM324 sebagai input sensor jarak pada vacuum cleaner.
Modul RF Data Transceiver seri YS-1020UB dirancang untuk sistem transmisi data profesional dalam jarak pendek. Gambar 5 merupakan rangkaian Modul RF Data Transceiver YS-1020UB yang berfungsi sebagai pengirim dan penerima data digital yang sudah diolah oleh mikrokontroler AT89S52. Untuk mengaktifkan Modul RF Data Transceiver YS-1020UB maka diperlukan tegangan sumber dari 3,3 volt - 5,5 volt. Jarak yang dapat dicapai modul ini adalah sama dengan 1 km. Pengiriman dan penerimaan data digital oleh modul ini menggunakan teknik modulasi digital yaitu GFSK (Gaussian Frequency Shift Keying) dengan frekuensi pembawa 433MHz[6].
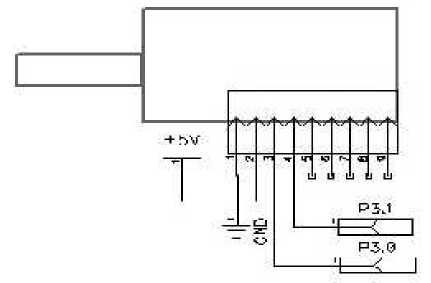
Gambar 5. Modul RF Data Transceiver YS-1020UB
Modul RF Data Transceiver YS-1020UB dihubungkan dengan port serial pada mikrokontroler AT89S52 yaitu P3.0 (Rx) dan P3.1 (Tx). Data digital yang dikirim dan diterima tidak dapat secara bersamaan (half duplex). Antenna yang digunakan adalah antena SMA (Sub Miniature versionA) merupakan antena yang menggunakan konektor SMA dengan impedansi 50Ω.
Rangkaian pengendali motor DC berfungsi mengendalikan arah putaran dari motor DC. Pada rangkaian pengendali motor DC digunakan dua buah IC L293D dan IC L298. Masukan rangkaian ini diperoleh dari keluaran port 2 pada mikrokontroler AT89S52. Rangkaian pengendali motor DC dapat dilihat pada gambar 6 dan gambar 7.
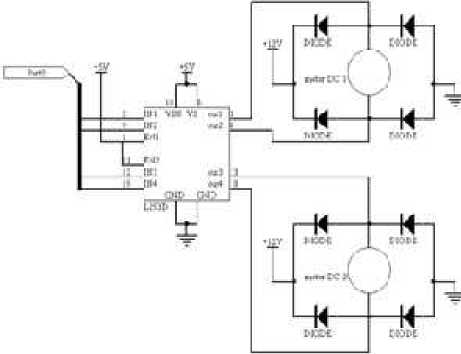
Gambar 6. Pengendali Motor DC dengan IC L293D
jika EN A dan EN B berlogika low maka keadaan masukan dan keluaran diabaikan.
Pada bagian sensor jarak digunakan fotodiode sebagai pengatur jarak dengan dinding. Pada yang direalisasikan akan dipasang empat buah sensor jarak yaitu bagian depan, belakang, samping kanan, dan samping kiri. Pada sensor jarak ini menggunakan rangkaian komparator dengan IC Op-Amp LM324. Rangkaian sensor jarak dapat dilihat pada gambar 8
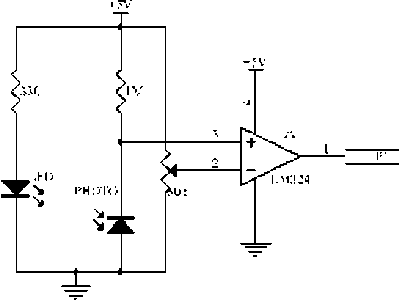
Gambar 8. Rangkaian Komparator dan Sensor Fotodioda
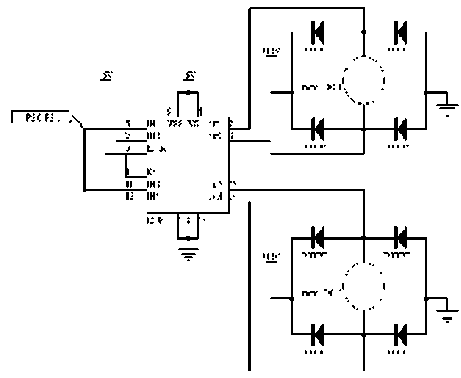
Gambar 7. Pengendali Motor DC dengan IC L298
Rangkaian komparator pada gambar 8 membandingkan tegangan pada masukan membalik dan tak membalik. Dari hasil perhitungan tegangan referensi pada komparator, maka didapatkan tegangan sebesar 4,54V.
-
v r v tf0l° c 10M 50M ref-v SitJJ1 +jjfotn -s 1M+1OM -11M 454v
Tegangan pada masukan membalik harus dibuat lebih rendah dari tegangan referensi untuk mendapatkan keluaran positif. Tegangan keluaran akan mencapai 4,54Volt apabila masukan positif (tegangan keluaran fotodioda) lebih besar dari masukan negative dan sebaliknya tegangan keluaran akan mencapai 0,5 volt apabila masukan negative lebih besar dari masukan positif. Jarak maksimal yang bisa dicapai sensor ini adalah sekitar 5 cm.
IC L293D memiliki empat buah masukan dan dua buah keluaran untuk mengatur arah putaran dua motor DC. Arah putaran clock wise dan counter clock wise tergantung dari input IN1, IN2, IN3, dan IN4. Masukan IN1 dan IN2 berfungsi untuk mengatur arah putaran motor DC 1 sedangkan IN3 dan IN4 berfungsi untuk mengatur arah putaran motor DC 2.
IC L298 mempunyai fungsi yang sama dengan IC L293D, hanya yang berbeda adalah arus operasi maksimalnya lebih tinggi yaitu mencapai 4A. Pengaturan masukan dan keluaran pada IC L298 tergantung dari kondisi logika pada EN A dan EN B, jika EN A dan EN B berlogika high maka pengaturan keluaran sesuai dengan kondisi masukan, sedangkan
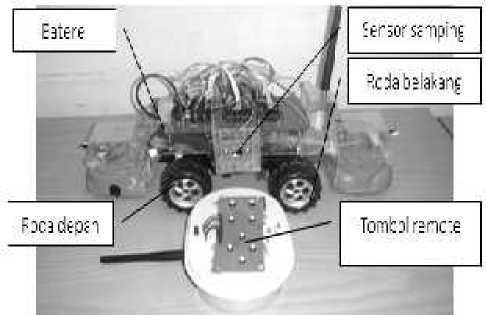
Gambar .9 memperlihatkan bagian samping dari vacuum cleaner nirkabel yang terdiri dari dua motor penyedot debu/kotoran yang berfungsi sebagai menarik debu dari lantai menuju tabung penampung. Motor penggerak roda depan dan penggerak roda belakang berfungsi sebagai pengarah jalan dari yaitu maju, mundur, belok kanan, dan belok kiri. Ukuran roda yang digunakan dengan diameter 6 cm dan lebar 3 cm. Pada saat mode otomatis maka sensor jarak akan aktif dan dua roda penggeser ke samping kanan dan samping kiri akan berfungsi sesuai dengan keadaan sensor.
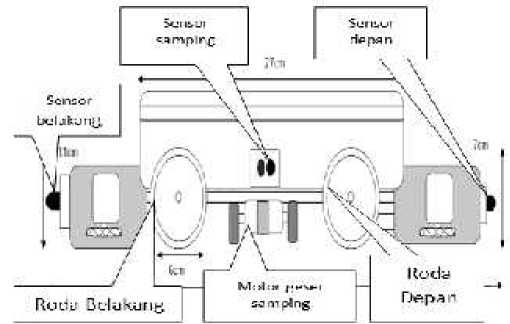
Gambar 9. Bentuk vacuum cleaner tampak samping
Diagram alir perangkat lunak pada bagian pengirim (remote control) seperti gambar 10. Pada bagian pengirim perancangan perangkat lunak dimulai dari inisialisasi port serial dan mengatur port 2 pada mikrokontroler sebagai masukan dari push button. Penekanan push button pada port 2 akan mengirim data FE, FD, FB, F7, EF, DF, BF, dan 7F secara terus menerus melalui port serial sampai tidak ada lagi penekanan (data pada port 2 = FF).
∙VUla∣
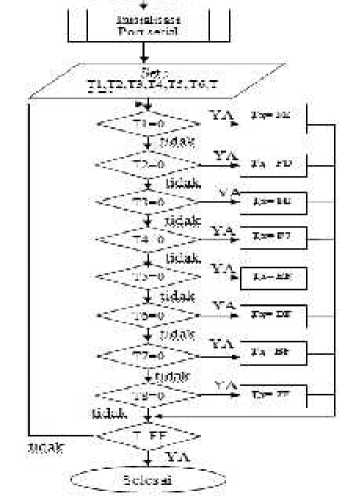
Gambar 10. Diagram alir perangkat lunak pada Pemancar (Remote Control)
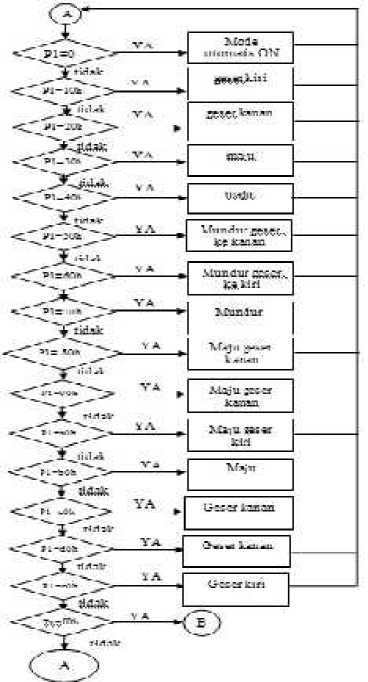
Seperti pada pengirim, perancangan perangkat lunak pada penerima juga dimulai dengan inisialisasi port serial. Data yang dikirim dan diterima oleh bagian penerima akan dibandingkan apakah sama dengan pada penerima, jika datanya sama maka motor penggerak yang sesuai akan dihidupkan, yang menyebabkan pergerakan vacuum cleaner.
Jika mode automatis dioperasikan maka vacuum cleaner akan bergerak geser kiri kanan dan maju jika menemui halangan. Diagram alir perangkat lunak pada bagian penerima seperti gambar 11.
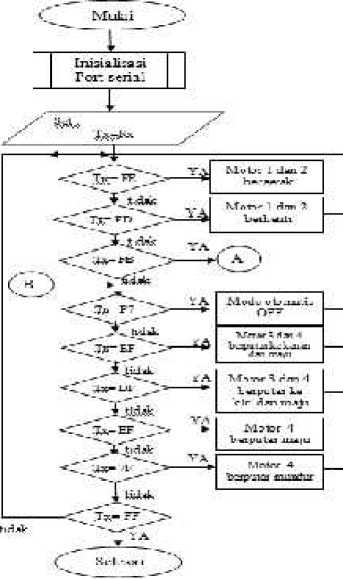
Gambar 11. Diagram alir perangkat lunak pada penerima (vacuum cleaner)
Realisasi pengendali nirkabel menggunakan Modul RF Data Transceiver YS-1020UB berbasis mikrokontroler AT89S52 tampak sampingnya seperti terlihat pada gambar 12.
Gambar 12. Vacuum cleaner nirkabel tampak samping
Pengujian dilakukan pada setiap rangkaian yang telah direalisasikan. Adapun perangkat keras yang diuji adalah:
-
1. Pengujian minimum sistem mikrokontroler AT89S52.
-
2. Pengujian rangkaian pengendali motor DC
-
3. Pengujian sensor jarak menggunakan sensor fotodiode
-
4. Pengujian secara keseluruhan
Hasil pengujian pada sistem minimum mikrokontroler remote control (pengirim) seperti tampak pada tabel 2.
Tabel 2. Kondisi Tombol pada Remote Control
|
No |
Tombol |
P2. |
Sebelum Pnekanan |
Sesudah Penekanan |
LED Indikator |
|
1 |
ON vacuum |
0 |
4,72 V |
0,01 V |
Nyala |
|
2 |
OFF vacuum |
1 |
4,72 V |
0,01 V |
Nyala |
|
3 |
ON sensor |
2 |
4,72 V |
0,01 V |
Nyala |
|
4 |
OFF sensor |
3 |
4,72 V |
0,01 V |
Nyala |
|
5 |
Kanan |
4 |
4,72 V |
0,01 V |
Nyala |
|
6 |
Kiri |
5 |
4,72 V |
0,01 V |
Nyala |
|
7 |
Mundur |
6 |
4,72 V |
0,01 V |
Nyala |
|
8 |
Maju |
7 |
4,72 V |
0,01 V |
Nyala |
Pada tabel 2 terlihat tegangan pada port 2 saat sebelum penekanan adalah 4,72 V, ini berarti port 2 dalam kondisi logika high. Pada saat sesudah penekanan tegangan pada port 2 berubah menjadi 0,01 V, ini berarti pada saat port 2 digunakan sebagai masukan dan ada penekanan tombol port 2 akan berlogika low. LED indikator menyala berarti semua tombol masukan pada remote control dapat berfungsi dengan baik.
Pengujian yang dilakukan adalah pada pin/lokasi sebagai berikut:
-
1. Masukan IC L293D sebagai pengendali motor DC penentu arah dari vacuum cleaner..
-
2.M asukan IC L298 sebagai penggerak motor DC penyedot debu.
-
4.4 Hasil uji masukan IC L293D sebagai pengendali motor DC penentu arah dari vacuum cleaner
Pengukuran nilai keluaran port mikrokontroler dan juga masukan dari IC l293D sebagai driver motor DC penggerak vacuum cleaner diukur menggunakan multimeter digital. Hasil pengujian lengkap terdapat pada tabel 3,4 dan 5.
Tabel 3. Hasil pengujian pengendali Motor DC L293D
|
No |
Kondisi |
Port2.4 |
Port2.5 |
Port2.6 |
Port 2.7 |
|
1 |
Maju |
0,01 V |
0,01 V |
0,01 V |
4,20V |
|
2 |
Mundur |
0,01 V |
0,01 V |
4,21 V |
0,01V |
|
3 |
Kanan |
0,01 V |
4,21 V |
0,01 V |
4,20V |
|
4 |
Kiri |
4,20 V |
0,01 V |
0,01 V |
4,21V |
Tabel 4 merupakan hasil uji dari IC L293D yang berfungsi sebagai penentu arah geser kanan dan geser kiri. Penggerak geser kanan dan geser kiri menggunakan duah buah motor yang diposisikan berlawanan arah dengan menggunakan empat masukan dari IC L293D. Port P0.4 sampai dengan port P0.7 digunakan sebagai port masukan pada penggerak geser kanan dan geser kiri .
Tabel 4. Hasil Uji Masukan Pengendali Motor DC L293D Penentu Arah Geser
|
No |
Kondisi |
Port 0.4 |
Port0.5 |
Port0.6 |
Port 0.7 |
|
1 |
Geser kanan |
4,22V |
0,01V |
4,22V |
0,01V |
|
2 |
Geser kiri |
0,01V |
4,20V |
0,01V |
4,20V |
Data pengujian keluaran dari pengendali motor DC L293D pada tabel 5 diperoleh berdasarkan masukan dari IC L293D. Pada saat kondisi maju masukan dari mikrokontroler pada port P2.7 akan diproses kemudian didapatkan tegangan keluaran sebesar 5,83V pada out3, hal ini akan menyebabkan motor DC bergerak searah jarum jam atau bergerak maju, keadaan sebaliknya akan berlaku pada saat kondisi mundur. Kondisi mundur menyebabkan keluaran out4 mempunyai tegangan keluaran 5,83V karena adanya masukan dari mikrokontroler pada port P2.6, hal ini akan menyebabkan motor DC bergerak berlawanan arah jarum jam atau bergerak mundur.
Pada kondisi kanan dua keluaran yaitu out1 dan out3 mempunyai tegangan masing – masing 5,84V dan 5,83V, ini berarti dua motor bergerak sekaligus
dengan arah putaran yang sama yakni searah jarum jam. Keadaan seperti itu membuat bergerak maju dan berbelok ke kanan. Kondisi kiri juga mengalami hal yang sama tetapi dengan posisi tegangan keluaran yang berbeda. Pada kondisi kiri keluaran out2 dan out3 yang masing – masing mempunyai tegangan 5,83V, sehingga arah putaran motor yang satu berlawanan dengan arah jarum jam, hal ini membuat bergerak ke arah kiri dan bergerak maju. Kondisi maju, mundur, kanan, dan kiri dikendalikan oleh keluaran mikrokontroler pada port P2.4 sampai dengan P2.7.
Tabel 5. Hasil Uji Keluaran Pengendali Motor DC L293D
|
No |
Kondisi |
Out1 |
Out2 |
Out3 |
Out4 |
|
1 |
Maju |
0.01V |
0,01V |
5,83V |
0,01V |
|
2 |
Mundur |
0.01V |
0,01V |
0,01V |
5,83V |
|
3 |
Kanan |
5,84V |
0.01V |
5,83V |
0,01V |
|
4 |
Kiri |
0.01V |
5,83V |
5,83V |
0,01V |
|
5 |
Geser kanan |
5,84V |
0,01V |
5,84V |
0,01V |
|
6 |
Geser kiri |
0,01V |
5,84V |
0,01V |
5,84V |
Pengujian masukan pada IC L298 dilakukan menggunakan multimeter digital. Hasil keseluruhan pengujian terdapat pada tabel 6.
Tabel 6. Hasil Uji Masukan IC L298
|
No |
Kondisi |
P2.0 |
P2.1 |
|
1 |
Vacuum ON |
3,82V |
3,82V |
|
2 |
Vacuum OFF |
0,01V |
0,01V |
Pengujian keluaran IC L298 dilakukan dengan menggunakan multimeter digital. Hasil lengkap pengujian terdapat pada tabel 7.
Tabel 7. Hasil Uji Keluaran IC L298
|
No |
Kondisi |
Out1 |
Out2 |
|
1 |
Vacuum ON |
4,98V |
4,98V |
|
2 |
Vacuum OFF |
0,16V |
0,16V |
Pengujian keluaran IC L298 pada saat kondisi vacuum ON, tegangan keluaran pada out1 dan out2 masing – masing sebesar 4,98V. Pada tegangan 4,98V motor DC penyedot debu sudah dapat berfungsi dengan baik. Pada saat kondisi vacuum OFF maka tegangan out1 dan out2 masing – masing menjadi 0,16V. Pada tegangan 0,16V motor DC penyedot debu berada pada keadaan tidak aktif.
Sensor jarak menggunakan empat buah fotodiode dan rangkaian komparator. Pengujian dilakukan pada masing – masing rangkaian dengan menggunakan multimeter digital. Adapun beberapa pengujian yang dilakukan pada: Masukan sensor fotodiode dan keluaran komparator LM324.
Hasil lengkap pengukuran keluaran sensor fotodiode seperti tabel 8.
Tabel 8. Hasil Uji Sensor Fotodiode
|
No |
Posisi Sensor |
Sebelum tehalang |
Sesudah terhalang |
|
1 |
Depan |
0,05 V |
0,08 V |
|
2 |
Belakang |
0,05 V |
0,08 V |
|
3 |
Kanan |
0,05 V |
0,08 V |
|
4 |
Kiri |
0,05 V |
0,08 V |
Pengukuran keluaran IC LM324 sebagai komparator dari sensor fotodiode dengan menggunakan multimeter digital. Hasil lengkap pengukuran seperti pada tabel 9.
Tabel 9. Hasil Uji Komparator LM324
|
No |
Posisi |
P1.4 |
P1.5 |
P1.6 |
P1.7 |
|
1 |
Depan |
0,01V |
0,01V |
0,01V |
3,47V |
|
2 |
Belakang |
0,01V |
0,01V |
3,47V |
0,01V |
|
3 |
Kanan |
3,47V |
0,01V |
0,01V |
0,01V |
|
4 |
Kiri |
0,01V |
3,47V |
0,01V |
0,01V |
Realisasi pada penelitian ini dibuat dalam dua mode yaitu mode manual dan mode otomatis. Mode manual adalah mode pengoperasian dengan menggunakan remote control atau mode yang dikendalikan melalui jarak jauh. Mode otomatis adalah mode pengoperasian dengan tergantung dari sensor jarak yang terdapat pada vacuum cleaner.
Mode Manual
Mode manual bekerja sesuai dengan perintah penekanan remote control. Pada remote control terdapat delapan buah tombol yang masing – masing mempunyai fungsi yang berbeda- beda. Delapan buah tombol ini tidak akan berfungsi jika mengaktifkan mode otomatis atau menekan tombol 3. Remote control akan berfungsi kembali pada saat menekan tombol 4. Gambar 13 adalah pengujian vacuum cleaner nirkabel pada mode manual.

Gambar 13. Membersihkan Debu pada Lantai dengan Mode Manual
Mode Otomatis
Mode otomatis menggunakan empat buah sensor jarak yang diletakkan di bagian depan, belakang, samping kanan, dan samping kiri vacuum cleaner. Mode otomatis hanya akan bekerja jika ada perintah dari remote control. Membersihkan lantai dengan mode otomatis sangat efisien karena tidak membutuhkan pengawasan. Begitu mode otomatis dinyalakan maka akan membersihkan lantai dengan sendirinya sampai ada perintah untuk berhenti dari remote control. Pola yang digunakan pada mode otomatis adalah pola acak jadi proses pembersihan lantai tergantung dari sensor jarak. Gambar 14 adalah pengujian vacuum cleaner pada mode otomatis.

Gambar 14. Membersihkan Debu pada Lantai dengan
Mode Otomatis
-
3. Sensor jarak dapat berfungsi dengan baik sehingga tidak bertabrakan dengan penghalang yang berada di depan, belakang, samping kanan, dan samping kiri dengan jarak maksimal 5cm;
-
[1] __.2001. AT89S52. http://www.atmel.com/dyn/ resources/prod_documents/doc1919.pdf.diakses
-
1 Juni 2009.
-
[2] ___.2008. Sensor Untuk Transducer.___. http: //elearning.gunadarma.ac.id/docmodul/
instrumentasi_untuk_pengukuran_rekayasa/bab5 _ sensor_untuk_transduser.pdf. diakses 1 Desember 2009
-
[3] ___.2005. Penguat Operasional. http: //www. ilmu.8k.com/pengetahuan/opamp.html. diakses 10 November 2008
-
[4] Wikipedia. 2009. Hbridge. http:// en. wikipedia.org/wiki/H_bridge. diakses 2 Desember 2009.
-
[5] McComb, Gordon dan Predko, Myke. 2006. Robot Builder’s Bonanza. New York McGraw-Hill
-
[6] ___,YS-1020UB RF Data Transceiver http: //lapan.te.ugm.ac.id/download.php?f=YS-1020UB%20manual.pdf. diakses 1 Desember 2009
-
[7] _____.2004. L293,L293D Quadupler Half-
HDrivers.http://focus.ti.com/lit/ds/symlink/l293d .pdf. diakses 2 Desember 2009.
-
[8] _____.2000. L298. http://www.datasheetcatalog
.org/datasheet2/2/052daje928cw7pc0uqs1ipyryp py.pdf. diakses 2 Desember 2009.
Dari pembahasan yang telah diuraikan sebelumnya, maka dapat ditarik simpulan berikut:
-
1. Minimum sistem mikrokontroler AT89S52 pada pengirim dan penerima dapat berfungsi dengan baik, yaitu port keluaran pada logika high mempunyai tegangan sebesar 4,72V dan pada logika low mempunyai tegangan sebesar 0,01V;
-
2. Pengendali motor DC penentu arah penyedot debu dapat bergerak maju, mundur, belok kanan, belok kiri, geser kanan, geser kiri dan menyedot debu;
Teknologi Elektro
9
Vol. 11 No.2 Juli - Desember 2012
Discussion and feedback