Pemetaan Terumbu Karang Berbasis Citra Unmanned Aerial Vehicle (UAV) Dan Satelit Sentinel-2A Dengan Metode Object Based Image Analysis (OBIA) Di Perairan Pulau Menjangan Bali
on
JMRT, Volume 7 No 1 Tahun 2024, Halaman: 25-33
JMRT
JOURNAL OF MARINE RESEARCH AND TECHNOLOGY
journal homepage: https://ojs.unud.ac.id/index.php/JMRT
ISSN: 2621 - 0096 (electronic); 2621 - 0088 (print)
Pemetaan Terumbu Karang Berbasis Citra Unmanned Aerial Vehicle (UAV) Dan Satelit Sentinel-2A Dengan Metode Object Based Image Analysis (OBIA) Di Perairan
Pulau Menjangan Bali
Ramadhani Ahmada*, I Dewa Nyoman Nurweda Putraa, I Putu Yogi Darmendra a
-
aProgram Studi Ilmu Kelautan, Fakultas Kelautan dan Perikanan, Universitas Udayana, Bali, Indonesia
*Corresponding author, email: ramadhaniahmad085@gmail.com
ARTICLE INFO
ABST RACT
Article history:
Received : 18 April 2023
Received in revised form : 7 August 2023
Accepted : 30 September 2023
Available online : 6 Februari 2024
Keywords: Coral reefs UAV
Sentinel-2A
OBIA
Kata Kunci: Terumbu karang UAV
Sentinel-2A OBIA
There is still little research on mapping benthic habitats on Menjangan Island, so the availability of spatial data in this area is still limited. This research aimed to map coral reefs using UAV imagery and Sentinel-2A imagery with the object-based/OBIA classification method and calculate the level of accuracy of classification results in the waters of Menjangan Island. This research was conducted in 4 water areas, especially waters where diving and snorkeling activities often occur. This research used Sentinel-2A satellite data acquired on March 17, 2022, and UAV data acquired on March 30, 2022. Area 1 live coral (KH) with an area of 0.76 Ha for UAV imagery, live coral (KH) on Sentinel imagery -2A, namely 0.64 Ha. Region 2, the area of live coral (KH) in the UAV image is 0.67 Ha, and live coral (KH) in the Sentinel-2A image is 0.49 Ha. Region 3, the area of live coral (KH) in the UAV image is 0.77 Ha; in the Sentinel-2A image, it is 0.60 Ha. The 4 live coral (KH) areas in the UAV image have an area of 0.83 Ha, and the live coral (KH) in the Sentinel-2A image covers an area of 0.62091 Ha. UAV imagery can produce an overall accuracy in each region of 97.96% in Region 1. 98.21% in Region 2, 98.84% in Region 3, and 96.77% in Region 4. The overall accuracy level of Sentinel-2A imagery is 85.71% in Region 1, 83.93% in Region 2, 86.05% in Region 3, and 83.87% in Region 4.
A B S T R A K
Penelitian pemetaan habitat bentik di Pulau Menjangan masih sedikit dilakukan, sehingga ketersediaan data spasial di daerah ini masih terbatas. Penelitian ini bertujuan untuk memetakan terumbu karang menggunakan citra UAV dan citra Sentinel-2A dengan metode klasifikasi berbasis objek/OBIA dan menghitung tingkat akurasi hasil klasifikasi di perairan Pulau Menjangan. Penelitian ini dilakukan pada 4 wilayah perairan khususnya perairan yang sering terdapat aktifitas diving dan snorkeling. Penelitian ini menggunakan data satelit Sentinel-2A yang diakuisisi pada 17 Maret 2022 dan pengambilan data UAV yang diakuisisi pada 30 Maret 2022. Wilayah 1 karang hidup (KH) dengan luas 0,76 Ha untuk citra UAV, karang hidup (KH) pada citra Sentinel-2A yaitu 0,64 Ha. Wilayah 2 luas karang hidup (KH) pada citra UAV yaitu 0,67 Ha, karang hidup (KH) pada citra Sentinel-2A yaitu 0,49 Ha. Wilayah 3 luas karang hidup (KH) pada citra UAV yaitu 0,77 Ha, pada citra Sentinel-2A seluas 0,60 Ha. Wilayah 4 karang hidup (KH) pada citra UAV memiliki luas 0,83 Ha dan karang hidup (KH) pada citra Sentinel-2A seluas 0,62 Ha. Citra UAV dapat menghasilkan akurasi keseluruhan pada masing-masing wilayah sebesar 97,96% pada wilayah 1. 98,21% pada wilayah 2, 98,84% pada wilayah 3 dan 96,77% pada wilayah 4. Tingkat akurasi citra Sentinel-2A keseluruhan sebesar 85,71% pada wilayah 1, 83,93% pada wilayah 2, 86,05% pada wilayah 3 dan 83,87% pada wilayah 4.
2024 jmrt. all rights reserved.
Pulau Menjangan merupakan pulau yang termasuk kedalam wilayah kawasan Taman Nasional Bali Barat (Yudasmara, 2013). Pulau Menjangan memiliki sebaran terumbu karang yang merata di sekeliling pulau (Hernowo et al., 2013). Tercatat pada tahun 2007, sebaran terumbu karang di Pulau Menjangan memiliki luasan 51,06 Ha yang kemudian mengalami penurunan pada tahun 2009 menjadi seluas 49,04 Ha dengan penelitian terakhir menemui penurunan luasan terumbu karang sebesar 0,84 Ha
(Dewi et al., 2011; Hariyanto & Lingga, 2014). Menurunnya sebaran terumbu karnag memiliki dampak yang besar bagi ekosistem bahari dimana ditemui pula penurunan jumlah biota laut yang berada di wilayah perairan Pulau Menjangan (Pradisty et al., 2017; Yudasmara, 2015). Guna mengatasi permasalahan ini, maka perlu dilakukan monitoring, salah satunya dengan melakukan pemetaan terumbu karang berkelanjutan guna mengetahui luasan terumbu karang (Boström-Einarsson et al., 2020).
Data citra didapatkan dari hasil pengambilan citra yang tidak dilakukan di lapangan, dengan salah metodenya adalah dengan menggunakan citra satelit. Pemetaan terumbu karang dengan menggunakan citra satelit dilakukan dengan mengolah data citra satelit untuk mendapatkan luasan terumbu karang pada suatu wilayah citra (Hedley et al., 2016). Salah satu jenis citra satelit yang sering dipergunakan untuk pemetaan sebaran terumbu karang merupakan citra yang didaptakan dari Sentinel-2A. Penggunaan citra Sentinel-2A dalam pemetaan sebaran terumbu karang dikarenakan beberapa hal diantaranya data yang bersifat open source, resolusi spasial citra Sentinel-2A (10m) yang lebih besar dibandingkan dengan citra open source lainnya seperti Landsat-8 (30 m), serta citra yang telah terkoreksi atmosfer (Hedley et al., 2018).
Pemanfaatan citra satelit untuk memetakan habitat dasar perairan dangkal tentu tidak terlepas dari proses klasifikasi ataupun analisis digital dari citra tersebut. Analisis digital data penginderaan jauh secara umum memiliki dua pendekatan yaitu berbasis piksel (pixel-based) dan berbasis objek (object-based). Penggunaan metode klasifikasi berbasis objek saat ini menjadi alternatif dalam mengklasifikasikan suatu objek permukaan bumi. Klasifikasi berbasis objek/ Objek-Based Image Analysis (OBIA) merupakan salah satu sub-kajian dari GISscience yang fokus pada pengembangan metode analisis citra penginderaan jauh berbasis objek sehingga menjadi beberapa objek yang memiliki kesamaan tertentu (Navulur, 2007).
Pemetaan habitat bentik di perairan dangkal, khususnya di perairan pantai Pulau Menjangan, masih sangat terbatas, sehingga data spasial mengenai habitat bentik di daerah ini masih sangat sedikit. Selain itu, penggunaan data citra UAV masih kurang berkembang dan belum pernah dilakukan sebelumnya. Data citra UAV dan data citra Sentinel-2A memiliki resolusi spasial yang berbeda sangat jauh, citra Sentinel-2A data yang bersifat open source, sehingga teknologi UAV dapat digunakan sebagai alternatif untuk kebutuhan data dan informasi spasial yang cepat. Berdasarkan uraian tersebut, maka perlu dilakukan penelitian mengenai pemetaan habitat bentik menggunakan metode OBIA dengan bantuan citra UAV dan citra satelit Sentinel-2A di lokasi penelitian.
-
2.2 Metode penelitian
Pada metode penelitian ini dibagi menjadi 4 tahapan utama yaitu Pra-pengolahan Citra, Pengolahan Citra, Pengambilan Data Lapangan, dan Uji Akurasi. Adapun rincian metode penelitian ini adalah sebagai berikut:
-
2.2.1 Pengambilan Data Lapangan
Survei lapangan atau Ground Truth Habitat (GTH) dilakukan untuk mengumpulkan data dan informasi mengenai habitat bentik perairan dangkal (Gambar 2 - 5). Pengumpulan data menggunakan metode stratified random sampling. Teknik pengumpulan data ini berdasarkan pada pengetahuan tentang lokasi penelitian yang dibagi kedalam kelompok-kelompok, titik pengamatan dipilih secara acak. Dalam penelitian ini penentuan kelompok tersebut ditentukan secara langsung di lapangan dan menyebar merata dengan maksud untuk memperoleh data keterwakilan dari semua objek di seluruh lokasi penelitian dengan baik.
2.1 Waktu dan Tempat
Lokasi penelitian dilakukan di perairan dangkal Pulau Menjangan, Kecamatan Grokgak, Kabupaten Buleleng, Provinsi Bali, dengan letak geografis antara 114º12'02'' - 114º14'30'' Bujur Timur dan 8º05'20''- 8º17'20'' Lintang Selatan (Gambar 1). Penelitian dilakukan pada bulan Januari – Juli 2022 di Laboratorium GIS dan Remote Sensing, Fakultas Kelautan dan Perikanan, Universitas Udayana.
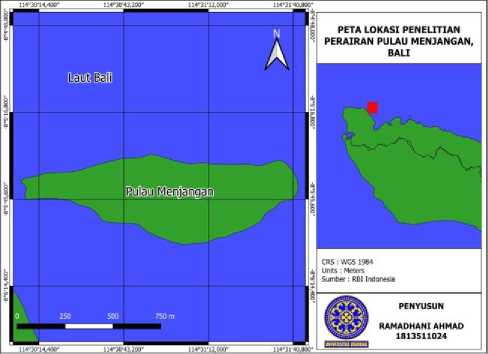
Gambar 1. Peta Lokasi Penelitian
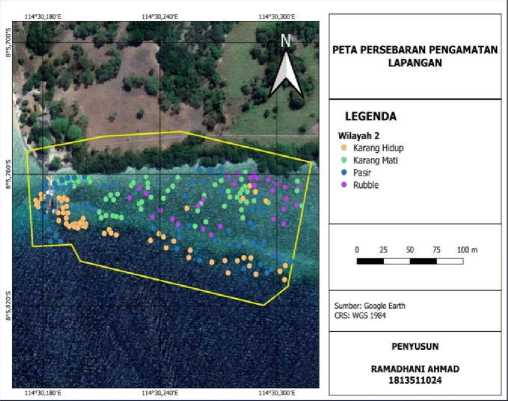
Gambar 3. Pengamatan Lapangan Wilayah 2.
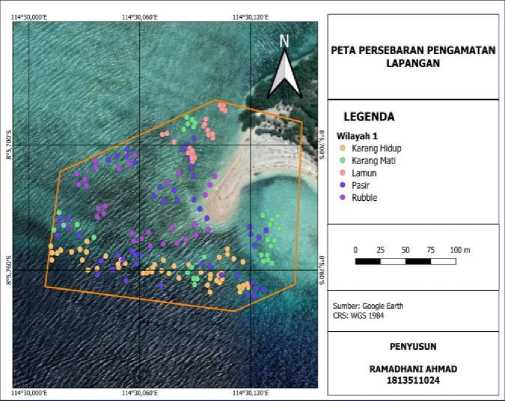
Gambar 2. Pengamatan Lapangan Wilayah 1.

Gambar 4. Pengamatan Lapangan Wilayah 3.
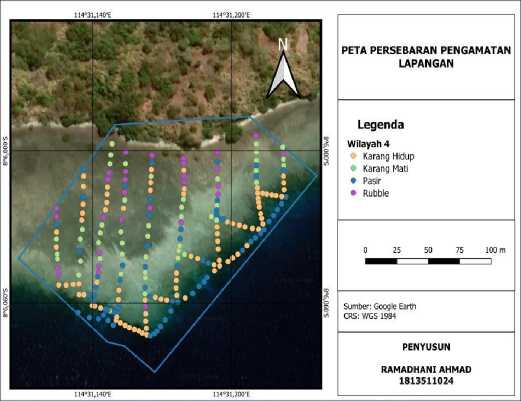
Gambar 5. Pengamatan Lapangan Wilayah 4.
Pengaturan kamera drone sangat penting untuk memastikan rentang ISO yang baik saat melakukan misi penerbangan. Perencanaan penerbangan pada drone menggunakan software pemetaan foto udara yaitu Pix4D Capture yang diunduh di Play Store. Pengaturan perencana penerbangan meliputi luasan area yang dipetakan, ketinggian wahana, sidelape dan fordwardlape data foto yang dihasilkan. Luasan area pemetaan diatur pada Pix4D Capture, sehingga dapat mengestimasikan waktu luasan
area yang dipetakan. Faktor ketinggian mempengaruhi ukuran setiap pixel pada citra yang dihasilkan, semakin tinggi Drone yang diterbangkan maka ukuran pixel semakin besar begitupun sebaliknya.
-
2.2.2 Pra-Pengolahan Citra
-
2.2.2.1 Citra Unmanned Aerial Vehicle (UAV)
-
Proses pra-pengolahan citra UAV yang pertama adalah dengan melakukan orthofoto digital menggunakan aplikasi agisoft photoscane untuk selanjutnya menghasilkan foto tunggal/citra orthofoto atau citra UAV. Proses ini dikerjakan secara berurutan hingga menghasilkan citra orthofoto atau citra UAV. Citra UAV yang sudah melewati proses orthofoto kemudian dilakukan cropping sesuai dengan daerah penelitian. Proses cropping dilakukan untuk memastikan tidak ada data kosong (null) yang sebelumnya masih ada pada citra orthofoto.
Pada setiap wilayah penelitian memiliki jumlah foto yang berbeda, wilayah 1 sebanyak 144 foto udara, wilayah 2 sebanyak 143 foto, wilayah 3 sebanyak 144 foto, dan wilayah 4 sebanyak 132 foto udara. Jumlah foto yang didapatkan disesuaikan dengan luas wilayah dan daya tahan baterai. Hasil akuisisi diproses secara orthomosaic atau digabungkan menjadi satu. Citra orthofoto yang diproduksi berdasarkan hasil akuisisi foto udara menggunakan DJI Mavic 2 Professional menghasilkan GSD atau resolusi spasial citra yang sangat tinggi yaitu sebesar 2,5 cm2/piksel. Citra orthofoto yang dihasilkan merupakan citra dua dimensi yang telah tergeoreferensi. Menurut (Ahmad et al., 2021), pada umumnya citra orthofoto hanya menghasilkan citra tampilan dua dimensi yang telah dilengkapi dengan informasi koordinat X dan Y. Citra orthophoto diproduksi melalui proses perbaikan yang berkaitan dengan kemiringan foto, distorsi lensa, dan perpindahan relief yang kemudian dieliminasi ataupun disesuaikan (Ahmad et al., 2021).
-
2.2.2.2 Citra Sentinel-2A
Koreksi kolom perairan digunakan dengan menghitung DII yang menggunakan informasi dari rasio koefisien atenuasi tiap pasangan band sinar tampak. Berdasarkan band sinar tampak yang digunakan pada penelitian ini, maka diperoleh tiga pasangan band dengan komposisi pasangan band yaitu DII 2/3 (biru-hijau), DII 2/4 (biru-merah), dan DII 3/4 (hijau-merah). Seluruh pasangan band DII yang dihasilkan dari citra Sentinel-2 selanjutnya akan digunakan sebagai input data feature dalam proses klasifikasi habitat bentik perairan dangkal berbasis objek. Perhitungan koefisien atenuasi (ki/kj) dari beberapa pasangan band sinar tampak diperoleh koefisien atenuasi berkisar antara 0.30-0.67. Kisaran koefisien atenuasi yang dihasilkan tersebut masih tergolong dalam kisaran atenuasi perairan laut (Lyzenga 1981). Koreksi kolom air digunakan untuk memperbaiki kualitas citra dengan cara mengurangi efek gangguan akibat kolom air. Berdasarkan teori, radiasi yang diterima sensor berasar dari perairan merupakan fungsi linier dari pantulan dasar perairan dan fungsi eksponensial kedalaman perairan. Intensitas energi berkurang secara eksponensial dengan semakin meningkatnya kedalaman perairan. Teknik yang umum digunakan untuk koreksi kolom air berdasarkan algoritma yang dikembangkan oleh Lyzenga (1981) yaitu dengan metode Depth Invariant Index. Depth Invariant Index (DII) merupakan citra transformasi yang sudah terkoreksi kolom air dengan nilai digital berupa indeks objek habitat dasar perairan dangkal (persamaan 1 - 3).
Depth Invariant Index = ln (Li) – [(Ki/Kj). ln (Lj)] (1)
Dimana:
Li: Nilai digital pada band i.
Lj: Nilai digital pada band j.
Ki/Kj: Rasio Koefisien atenuasi pada pasangan band i ki∕kl=a+√(a^2+1) (2)
a (σ_ii-σ_ij)/ [2σ] _ij (3)
Dimana:
σii,jj: Varian band i, atau band j
σij: Covarian band ij
-
2.3.1 Pengolahan Citra
-
2.3.1.1 Proses Fotogrametri
-
Teknik fotogrametri terdiri atas koreksi data foto udara, identifikasi data foto udara, melakukan triangulasi dari data foto udara yang dihasilkan. Koreksi foto udara dilakukan untuk mengkoreksi distorsi pada lensa yang dihasilkan dari kamera non-metrik dan melakukan masking foto dari area foto yang tidak ingin dimasukan kedalam prosess selanjutnya. Proses triangulasi udara berorientasi pada hubungan antar foto dan sistem koordinat. Proses identifikasi titik ikat antar foto dengan menerjemahkan piksel foto ke dalam koordinat secara otomatis oleh perangkat lunak Agisoft Photoscan. Proses fotogrametri seperti: 1) input foto udara; 2) pemeriksaan foto dan masking; 3) align photos / penyelarasan foto; 4) membangun dense cloud; 5) membangun mesh (model poligon 3D); 6) membangun tekstur; 7) membentuk orthophotos; 8) eksport hasil orthomosaic citra foto udara. Tahapan analisis orthomosaic foto dan 3D point cloud dengan teknik fotogrametri mengikuti petunjuk (Casella et al., 2022).
-
2.3.1.2 Klasifikasi Citra
Untuk klasifikasi citra, Object-based Image Classification (OBIA) digunakan untuk mengklasifikasikan citra dan memetakan latar belakang habitat. OBIA merupakan metode klasifikasi yang dikembangkan dengan melakukan segmentasi dan analisis terhadap objek atau mengklasifikasikan citra berdasarkan fitur spasial, spektral, dan temporal, sehingga menghasilkan objek atau segmen citra yang digunakan untuk klasifikasi (Wang et al., 2004; Blaschke, 2010). Secara umum, langkah-langkah implementasi OBIA dapat dibagi menjadi dua tahap: 1) memulai proses segmentasi citra dan 2) mengklasifikasikan citra yang telah disegmentasi ke dalam kelas- kelas yang telah ditentukan.
Konsep klasifikasi bertingkat yang dikembangkan dalam penelitian ini terdiri dari dua tingkat objek citra, yaitu tingkat 1 (tingkat terumbu karang) dan tingkat 2 (habitat bentik). Beberapa algoritma digunakan untuk mengklasifikasikan citra pada setiap level. Algoritma ini digunakan untuk membuat sekumpulan aturan untuk pohon proses, yang digunakan sesuai dengan kebutuhan pengguna. Kumpulan aturan merupakan kumpulan dari beberapa algoritma yang digunakan untuk mengklasifikasikan objek ke dalam kelas tertentu (Anggoro, 2015; Anggoro et al., 2017).
Proses klasifikasi pada level 1 menggunakan metode contextual editing yang merupakan proses klasifikasi berdasarkan aspek spektral dan spasial dengan menentukan nilai thereshold untuk setiap kelas (Nababan et al., 2021). Klasifikasi citra UAV menggunakan input fitur nilai threshold dari nilai transformasi HSI (hue, saturation, intensity) dan nilai rasio band (layer) pada citra Sentinel-2. Klasifikasi level 1 akan menghasilkan 3 kelas yaitu daratan, perairan dangkal, dan perairan dalam. Hasil dari kelas perairan dangkal menjadi batasan area kajian yang selanjutnya akan dilakukan segmentasi ulang pada level 2 dengan penerapan algoritma klasifikasi seperti SVM (support vector machine). Phinn et al. (2011) dan Anggoro et al. (2017) mengungkapkan bahwa pada sistem hasil klasifikasi level 1 yaitu pada kelas perairan dangkal yang menjadi batasan area kajian dan
dilakukan proses segmen baru untuk klasifikasi pada habitat bentik (level 2).
Algoritma klasifikasi yang digunakan adalah algoritma machine learning yaitu SVM (Support Vector Machine). Algoritma SVM merupakan klasifikasi terbimbing yang dapat mencari sebuah vector atau garis yang berfungsi sebagai pemisah dua kelas dengan memaksimalkan margin antar kelas tersebut. Algoritma klasifikasi ini berdasarkan prinsip linier classfier yang tergolong klasifikasi machine learning. Konsep SVM dapat dijelaskan secara sederhana sebagai usaha mencari SVM dapat dijelaskan secara sederhana sebagai usaha mencari hyperplane terbaik yang berfungsi sebagai pemisah dua buah kelas pada input space (Nugroho et al., 2003). Hyperplane adalah sebuah garis lurus atau bidang mendatar yang memisahkan kelas-kelas. SVM menetapkan sampel uji suatu kelas berdasarkan satu dari dua kemungkinan penamaan. Penamaan sampel data dalam proses klasifikasi data penginderaan jauh adalah piksel yang merepresentasekan vector pola setiap kanal citra yang terdiri dari satu set pengukuran numerik. Implementasi SVM linear mengasumsikan bahwa data fitur multispektral terpisah secara linear dalam ruang data dan keanggotaan kelas yang berbeda tertumpang susun satu dengan yang lain (Cortes & Vapnik, 1995). Garis pemisah antar kelas dapat dibuat berupa garis linear dan radial basis function. Secara matematis algoritma SVM dapat ditulis sebagai berikut (Tzotsos & Argialas, 2008).
-
2.3.2 Uji Akurasi
Pengujian akurasi dilakukan terhadap seluruh peta hasil klasifikasi untuk mengetahui akurasi teknik klasifikasi yang diterapkan. Uji akurasi yang umum dilakukan pada data hasil klasifikasi penginderaan jauh adalah confusion matrix (Tabel 1). Hal ini dilakukan dengan membandingkan citra hasil klasifikasi dengan kategori atau objek yang sebenarnya diidentifikasi dari pengamatan lapangan (Wahiddin, 2015). Menurut Congalton dan Green (2009), uji akurasi terdiri dari overall accuracy (OA) (persamaan 4), producer accuracy (PA) (persamaan 5), dan user accuracy (UA) (persamaan 6).
|
Overall accuracy (OA) = 1~^ |
⅛ × 100% |
(4) |
|
Producer accuracy (PA) = ^1 |
× 100% |
(5) |
|
User accuracy (UA) = ^y × 100% |
(6) | |
|
Keterangan: n adalah jumlah |
baris pada matriks, xii adalah jumlah | |
|
pengamatan pada kolom ke-i dan baris ke-i dan xjj merupakan jumlah | ||
|
pengamatan pada kolom ke-j dan baris ke-j. | ||
|
Tabel 1. Confusion matrix (matriks kesalahan). | ||
|
Data Lapangan | ||
|
Hasil A B |
C |
D Jumlah (PA) |
|
Klasifikasi | ||
|
A X11 X12 |
X13 |
X14 X1+ X11/X1+ |
|
B X21 X22 |
X23 |
X24 X2+ X22/X2+ |
|
C X31 X32 |
X33 |
X34 X3+ X33/X3+ |
|
D X41 X42 |
X43 |
X44 X4+ X44/X4+ |
|
Jumlah X1+ X2+ |
X3+ |
X4+ |
|
(UA) X11/X1+ X22/X2+ X33/X3+ |
X44/X4+ | |
Berdasarkan hasil skala segmentasi didapatkan hasil bahwa citra UAV menggunakan skala 250, dan 50, sedangkan Sentinel-2 menggunakan skala 5, dan 2, terlihat bahwa parameter skala segmentasi sangat mempengaruhi proses pembentukan objek pada citra, baik jumlah maupun bentuk objek. Wahidin et al., 2015 telah membuktikan bahwa pengaruh skala segmentasi dapat mempengaruhi bentuk, ukuran, dan jumlah objek yang dihasilkan.
Jumlah dan ukuran objek dalam gambar tergantung pada heterogenitas atau kompleksitas objek di lokasi penelitian, dalam hal ini habitat bentik di perairan dangkal. Wilayah yang memiliki heterogenitas objek pada suatu citra akan menghasilkan objek yang lebih banyak dibandingkan wilayah yang memiliki homogenitas objek (Anggoro et al., 2015). Selain itu, resolusi spasial pada citra yang digunakan juga akan mempengaruhi proses pembentukan objek. Citra dengan resolusi spasial yang berbeda walaupun pada wilayah yang sama akan menghasilkan jumlah, bentuk, dan ukuran objek yang berbeda (Gambar 6).
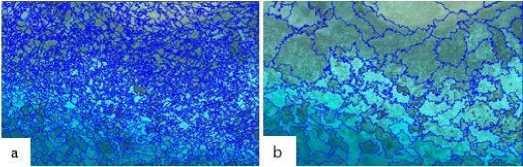
Gambar 6. Variasi ukuran objek hasil optimasi segmentasi pada citra UAV; Skala segmentasi (a) 50, (b) 250.
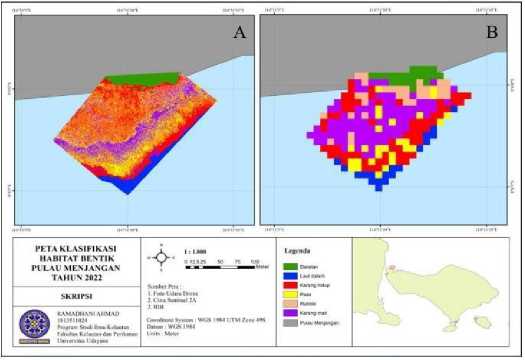
Gambar 8. Peta Persebaran Terumbu Karang Di Perairan Pulau Menjangan, Bali Dengan Klasifikasi Object-Based Image Analysis (OBIA) (A) Hasil Klasifikasi Citra Drone, (B) Hasil Klasifikasi Citra Sentinel-2A.
3.2 Klasifikasi Object-Based Image Analysis (OBIA)
Proses klasifikasi berdasarkan objek merupakan pendekatan yang pada proses klasifikasinya tidak hanya mempertimbangkan aspek spektral dan spasialnya saja, tetapi juga mempertimbangkan aspek bentuk objek pada citra yang digunakan. Pada proses klasifikasi dengan metode Object-Based Image Analysis (OBIA) menggunakan algoritma multiresolution segmentation (MSR).
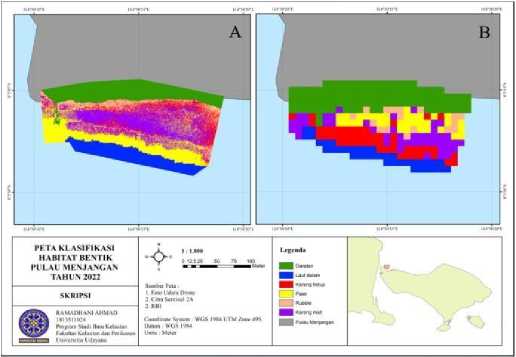
Gambar 7. Peta Persebaran Terumbu Karang Di Perairan Pulau Menjangan, Bali Dengan Klasifikasi Object-Based Image Analysis (OBIA) (A) Hasil Klasifikasi Citra Drone, (B) Hasil Klasifikasi Citra Sentinel-2A.
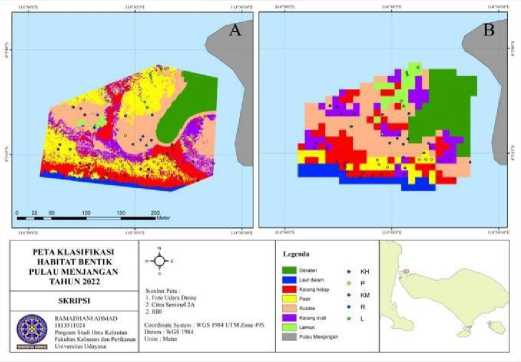
Gambar 9. Peta Persebaran Terumbu Karang Di Perairan Pulau Menjangan, Bali Dengan Klasifikasi Object-Based Image Analysis (OBIA) (A) Hasil Klasifikasi Citra Drone, (B) Hasil Klasifikasi Citra Sentinel-2A.
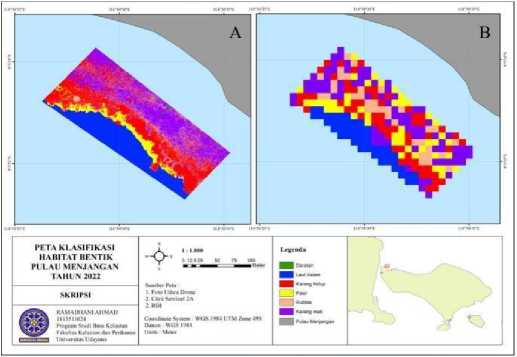
Gambar 10. Peta Persebaran Terumbu Karang Di Perairan Pulau Menjangan, Bali Dengan Klasifikasi Object-Based Image Analysis (OBIA) (A) Hasil Klasifikasi Citra Drone, (B) Hasil Klasifikasi Citra Sentinel-2A.
Proses klasifikasi berdasarkan objek merupakan pendekatan yang pada proses klasifikasinya tidak hanya mempertimbangkan aspek spektral dan spasialnya saja, tetapi juga mempertimbangka
aspek bentuk objek pada citra yang digunakan. Objek dibuat menggunakan proses segmentasi yang melibatkan pengelompokan piksel yang berdekatan dengan kualitas yang sama (kesamaan spektral) menggunakan metode segmentasi dengan pembatas antara setiap objek dalam gambar. Proses klasifikasi Object-Based Image Analysis (OBIA) menggunakan algoritma Multiresolution Segmentation (MSR). Klasifikasi ini didasarkan pada prinsip bahwa sampel yang khas diperlukan untuk mewakili setiap kelas dalam citra. Berdasarkan sampel yang digunakan, algoritma mencari objek sampel terdekat dalam ruang fitur untuk setiap objek dalam gambar. Hasil klasifikasi sangat bergantung pada ketepatan operator dalam menentukan domain pembelajaran (Setiani et al., 2016).
Berdasarkan hasil klasifikasi menggunakan metode ObjectBased Image Analysis (OBIA) terlihat dengan jelas bahwa kelas habitat bentik terdistribusi pada wilayah perairan dangkal. Pada Gambar 7 terlihat untuk persebaran Terumbu Karang pada Citra Sentinel-2 dan Citra UAV terlihat perbedaan dimana secara visual dapat dibedakan dengan jelas antara klasifikasi kelas karang hidung, karang mati, lamun, rubble, dan pasir. Selanjutnya pada Gambar 8. Klasifikasi yang terlihat antara karang, hidup, karang mati, lamun, rubble, dan pasir lebih dominan klasifikasi kelas karang hidup. Sedangkan pada Gambar 9. Terlihat untuk persebaran terumbu karang yang didominasi kelas karang hidup, beberapa terdapat juga klasifikasi karang mati pada bagian pinggir Pantai. Pada Gambar 10. Terlihat perbedaan klasifikasi pada kedua hasil Dimana persebaran antara karang hidup, karang mati, lamun, rubble, dan pasir lebih merata. Secara visual, dapat dibedakan dengan jelas antara kelas karang hidup, karang mati, lamun, rubble, dan pasir. Hasil klasifikasi pada citra UAV dan citra Sentinel-2 menunjukkan kelas karang hidup (KH) mendominasi area perairan di lokasi penelitian. Hasil klasifikasi citra UAV baik dalam menggambarkan objek pada setiap kelas yang digunakan. Kemudian pada hasil klasifikasi Sentinel-2, menunjukkan bahwa dari hasil klasifikasi menggunakan citra Sentinel-2 kurang baik dalam menggambarkan objek pada setiap kelas yang digunakan, dapat terlihat bahwa banyak kelas yang bukan termasuk karang mati, tetapi terdeteksi ke dalam kelas rubble. Perbedaan terlihat dari resolusi spasial antara citra UAV dan Sentinel-2 yang mempengaruhi proses pembentukan segmen/objek.
-
3.3 Uji Akurasi
Perhitungan akurasi dari hasil klasifikasi citra menggunakan matriks kesalahan atau yang biasa disebut dengan confussion matriks yang terdiri dari 5 perhitungan yaitu terdiri dari user accuracy (UA), procedur accuracy (PA), overall accuracy (OA), omission error (OE), dan commission error (CE) dengan data lapangan yang digunakan diantaranya terdiri dari kelas Karang Hidup (KH), Pasir (P), Lamun (L), Rubble (R), dan Karang Mati (KM). Hasil perhitungan akurasi dari setiap citra dapat lihat pada setiap tabel.
Tabel 2. Conffusion Matriks Klasifikasi Citra Sentinel-2A Wilayah 1 Persebaran Terumbu Karang Algoritma Object-Based Image Analysis (OBIA).
|
Hasil Klasifikas i |
Pengamantan Data Lapangan |
tota l |
UA (%) |
CE (%) | ||||
|
KH |
P |
R |
KM |
L | ||||
|
KH |
12 |
0 |
0 |
2 |
0 |
14 |
85,71 |
14,2 9 |
|
P |
0 |
6 |
0 |
1 |
0 |
7 |
85,71 |
14,2 9 |
|
R |
0 |
1 |
9 |
1 |
0 |
11 |
81,82 |
18,1 8 |
|
KM |
0 |
1 |
1 |
10 |
0 |
12 |
83,33 |
16,6 7 |
|
L |
0 |
0 |
0 |
0 |
5 |
5 |
100 |
0 |
|
total |
12 |
8 |
10 |
14 |
5 |
49 | ||
|
PA (%) |
100 |
75 |
90 |
71,43 |
10 0 |
OA (%) |
85,7 1 | |
|
EO (%) |
0 |
10 |
10 |
20,69 |
0 |
KA (%) |
83,7 | |
Tabel 3. Conffusion Matriks Klasifikasi Citra Sentinel-2A Wilayah 2 Persebaran Terumbu Karang Algoritma Object-Based Image Analysis (OBIA).
|
Hasil Klasifikasi |
Pengamantan Data Lapangan |
total |
UA (%) |
CE (%) | |||
|
KH |
P |
R |
KM | ||||
|
KH |
15 |
0 |
0 |
1 |
16 |
93,75 |
6,25 |
|
P |
0 |
9 |
1 |
0 |
10 |
90 |
10 |
|
R |
0 |
3 |
11 |
2 |
15 |
73,33 |
26,67 |
|
KM |
1 |
0 |
2 |
12 |
14 |
85,71 |
21,43 |
|
total |
16 |
11 |
14 |
15 |
56 | ||
|
PA (%) |
93,75 |
81,82 |
78,57 |
80 |
OA (%) |
83,93 | |
|
EO (%) |
6,25 |
18,18 |
28,57 |
20 |
KA (%) |
81,42 | |
|
Tabel 4. Conffusion Persebaran Terumbu (OBIA). |
Matriks Karang |
Klasifikasi Citra Sentinel-2A Wilayah 3 Algoritma Object-Based Image Analysis | |||||
|
Hasil |
Pengamantan Data Lapangan |
total |
UA |
CE | |||
|
Klasifikasi |
KH |
P |
R |
KM |
(%) |
(%) | |
|
KH |
26 |
0 |
0 |
2 |
28 |
92,86 |
7,14 |
|
P |
0 |
16 |
1 |
0 |
17 |
94,12 |
5,88 |
|
R |
0 |
2 |
12 |
2 |
16 |
75 |
25 |
|
KM |
2 |
0 |
3 |
20 |
25 |
80 |
20 |
|
total |
28 |
18 |
16 |
24 |
86 | ||
|
PA (%) |
92,86 |
88,89 |
75 |
83,33 |
OA (%) |
86,05 | |
|
EO (%) |
7,14 |
11,11 |
25 |
16,67 |
KA (%) |
81,06 | |
|
Tabel 5. Conffusion Persebaran Terumbu (OBIA). |
Matriks Karang |
Klasifikasi Citra Sentinel-2A Wilayah 4 Algoritma Object-Based Image Analysis | |||||
|
Hasil |
Pengamantan Data Lapangan t |
otal |
UA |
CE | |||
|
Klasifikasi |
KH |
P |
R |
KM |
(%) |
(%) | |
|
KH |
16 |
0 |
0 |
1 |
17 |
94.12 |
5.88 |
|
P |
0 |
10 |
1 |
0 |
11 |
90.91 |
9.09 |
|
R |
0 |
1 |
12 |
2 |
15 |
80 |
20 |
|
KM |
2 |
0 |
3 |
14 |
19 |
73.68 |
29.41 |
|
total |
18 |
11 |
16 |
17 |
62 | ||
|
PA (%) |
88.89 |
90.91 |
75 |
82.35 |
OA (%) |
83.87 | |
|
EO (%) |
11.11 |
9.09 |
25 |
17.65 |
KA (%) |
81.49 | |
Perhitungan akurasi dari hasil klasifikasi menggunakan citra UAV untuk Conffusion matrix algoritma Object-Based Image Analysis (OBIA) pada tabel berikut.
Tabel 6. Conffusion Matriks Klasifikasi Citra Drone pada Wilayah 1 Persebaran Terumbu Karang Algoritma Object-Based Image Analysis (OBIA).
Hasil Pengamantan Data Lapangan total UA CE
|
Klasifikasi |
KH |
P |
R |
KM |
L |
(%) |
(%) | |
|
KH |
15 |
0 |
0 |
0 |
0 |
15 |
100 |
0 |
|
P |
0 |
7 |
0 |
0 |
0 |
7 |
100 |
0 |
|
R |
0 |
0 |
9 |
0 |
0 |
9 |
100 |
0 |
|
KM |
0 |
0 |
1 |
12 |
0 |
13 |
92,3 |
7,7 |
|
L |
0 |
0 |
0 |
0 |
5 |
5 |
100 |
0 |
|
total |
15 |
7 |
10 |
12 |
5 |
49 | ||
|
PA (%) |
100 |
100 |
90 |
100 |
100 |
OA (%) |
97,9 | |
|
EO (%) |
0 |
0 |
10 |
0 |
0 |
KA (%) |
97,4 | |
Tabel 7. Conffusion Matriks Klasifikasi Citra Drone pada Wilayah 2 Persebaran Terumbu Karang Algoritma Object-Based Image Analysis (OBIA).
|
Hasil Klasifikasi |
Pengamantan Data Lapangan |
total |
UA (%) |
CE (%) | |||
|
KH |
P |
R |
KM | ||||
|
KH |
18 |
0 |
0 |
0 |
18 |
100 |
0 |
|
P |
0 |
10 |
0 |
0 |
10 |
100 |
0 |
|
R |
0 |
1 |
12 |
0 |
13 |
92,3 |
7,7 |
|
KM |
0 |
0 |
0 |
15 |
15 |
100 |
0 |
|
total |
18 |
11 |
12 |
15 |
56 | ||
|
PA (%) |
100 |
90,9 |
100 |
100 |
OA (%) |
98,2 | |
|
EO (%) |
0 |
9,09 |
0 |
0 |
KA (%) |
97,9 | |
|
Tabel 8. Conffusion Matriks Klasifikasi Citra Drone pada Wilayah 3 Persebaran Terumbu Karang Algoritma Object-Based Image Analysis (OBIA). | |||||||
|
Hasil |
Pengamantan Data Lapangan |
total |
UA |
CE | |||
|
Klasifikasi |
KH |
P |
R |
KM |
(%) |
(%) | |
|
KH |
30 |
0 |
0 |
0 |
30 |
100 |
0 |
|
P |
0 |
17 |
0 |
0 |
17 |
100 |
0 |
|
R |
0 |
0 |
15 |
1 |
16 |
93,8 |
6,3 |
|
KM |
0 |
0 |
0 |
23 |
23 |
100 |
0 |
|
total |
30 |
17 |
15 |
24 |
86 | ||
|
PA (%) |
100 |
100 |
100 |
95,9 |
OA (%) |
98,8 | |
|
EO (%) |
0 |
0 |
0 |
4,2 |
KA (%) |
98,4 | |
|
Tabel 9. Conffusion Matriks Klasifikasi Citra Drone pada Wilayah 4 Persebaran Terumbu Karang Algoritma Object-Based Image Analysis (OBIA). | |||||||
|
Hasil |
Pengamantan Data Lapangan |
total |
UA |
CE | |||
|
Klasifikasi |
KH |
P |
R |
KM |
(%) |
(%) | |
|
KH |
20 |
0 |
0 |
0 |
20 |
100 |
0 |
|
P |
0 |
10 |
0 |
0 |
10 |
100 |
0 |
|
R |
0 |
1 |
13 |
0 |
14 |
92,9 |
7,1 |
|
KM |
0 |
0 |
1 |
17 |
18 |
94,4 |
5,6 |
|
total |
20 |
11 |
14 |
17 |
62 | |
|
PA (%) |
100 |
90,9 |
92,9 |
100 |
OA (%) |
96,8 |
|
EO (%) |
0 |
9,1 |
7,1 |
0 |
KA (%) |
96,3 |
Tabel 9. Hasil Gabungan Overall Accuracy (OA) Metode Object- Based Image Analysis (OBIA).
Wilayah Overall Accuracy (%)
UAV Sentinel-2A
|
Wilayah 1 |
97,96 |
85,71 |
|
Wilayah 2 |
98,21 |
83,93 |
|
Wilayah 3 |
98,84 |
86,05 |
|
Wilayah 4 |
96,77 |
83,87 |
|
Rata-rata |
97,94 |
84,89 |
71,43%. Kemudian pada wilayah 2 pada Tabel 3. nilai UA tertinggi diperoleh pada kelas karang hidup yaitu 93,75%, sedangkan nilai UA terendah terdapat pada kelas rubble yaitu dengan nilai 73,33%. Selanjutnya nilai PA tertinggi dan terendah pada wilayah 2 pada Tabel 3. yaitu pada kelas karang hidup dengan nilai 93,75% dan kelas rubble dengan nilai 78,57%. Selanjutnya wilayah 3 pada Tabel 4. nilai UA tertinggi diperoleh pada kelas pasir yaitu 94,12%, untuk nilai UA terendah terdapat pada kelas rubble yaitu dengan nilai 75%. Sedangkan nilai PA wilayah 3 pada Tabel 4. yang tertinggi diperoleh pada kelas karang hidup yaitu dengan nilai 92,86%, dan nilai PA terendah terdapat pada kelas rubble yaitu 75%. Kemudian klasifikasi wilayah 4 pada Tabel 5. menunjukkan nilai UA tertinggi diperoleh pada kelas karang hidup dengan nilai 94,12%, dan nilai UA terendah diperoleh pada kelas rubble yaitu dengan nilai 73,68%. Selanjutnya nilai PA tertinggi diperoleh pada kelas pasir dengan nilai 90.91%, dan nilai PA terendah terdapat pada kelas rubble yaitu dengan nilai 75%. Dari hasil akurasi klasifikasi Sentinel-2A dengan metode Object-Based Image Analysis (OBIA) pada Tabel 2. sampai Tabel 5. dapat dilihat bahwa hasil akurasi secara keseluruhan menghasilkan nilai OA sebesar 85,1% wilayah 1, 83,93% wilayah 2, 86,05% wilayah 3, dan 83,87% wilayah 4. Dengan nilai OA tersebut, maka hasil uji akurasi klasifikasi citra Sentinel-2 pada metode Object-Based Image Analysis (OBIA) sudah baik dengan batas minimal yang telah ditetapkan sebagai batas akurasi.
Hasil klasifikasi citra UAV dengan metode Object-Based Image Analysis (OBIA) menunjukkan bahwa wilayah 1 pada Tabel 6. nilai UA tertinggi diperoleh pada kelas karang hidup, pasir, rubble, dan lamun yaitu dengan nilai masing-masing 100%, selanjutnya nilai UA terendah diperoleh pada kelas karang mati dengan nilai 92,31%. Sedangkan untuk nilai PA tertinggi diperoleh pada kelas karang hidup, pasir, lamun dan kelas karang mati dengan masing-masing 100%, untuk nilai PA terendah diperoleh pada kelas rubble yaitu 90%. Kemudian wilayah 2 pada Tabel 7 nilai UA tertinggi diperoleh pada kelas karang hidup, pasir, dan kelas karang mati yaitu dengan nilai masing- masing 100%, sedangkan nilai UA terendah terdapat pada kelas rubble yaitu dengan nilai 91,31%. Selanjutnya nilai PA tertinggi dan terendah di wilayah 2 pada Tabel 7. yaitu diperoleh pada kelas karang hidup, rubble, dan kelas karang mati dengan nilai msing-masing 100% dan kelas pasir dengan nilai 90,91%. Selanjutnya wilayah 3 pada Tabel 8. nilai UA tertinggi diperoleh pada kelas karang hidup, pasir, dan kelas karang mati yaitu msaing-masing dengan nilai 100%, untuk nilai UA terendah terdapat pada kelas rubble yaitu dengan nilai 93,75%. Sedangkan nilai PA wilayah 3 pada Tabel 8. yang tertinggi diperoleh pada kelas karang hidup, pasir, dan kelas rubble yaitu dengan nilai masing-masing 100%, dan nilai PA terendah terdapat pada kelas karang mati yaitu dengan nilai 95,83%. Kemudian klasifikasi wilayah 4 pada Tabel 9. menunjukkan nilai UA tertinggi diperoleh pada kelas karang hidup dan kelas pasir dengan nilai masing-masing 100%, dan nilai UA terendah diperoleh pada kelas rubble yaitu dengan nilai 92,86%. Selanjutnya nilai PA tertinggi diperoleh pada kelas karang hidup dan kelas karang mati dengan nilai masing-masing 100%, dan nilai PA terendah terdapat pada kelas pasir yaitu dengan nilai 90,91%. Dari hasil akurasi klasifikasi UAV dengan metode Object-Based Image Analysis (OBIA) pada Tabel 6. sampai Tabel 9. dapat dilihat bahwa hasil akurasi secara keseluruhan menghasilkan nilai OA sebesar 97,96% wilayah 1, 98,21% wilayah 2, 98,84% wilayah 3, dan 96,77% wilayah 4. Dengan nilai OA tersebut, maka hasil uji akurasi klasifikasi citra UAV pada metode Object-Based Image Analysis (OBIA) sudah baik dengan batas minimal yang telah ditetapkan sebagai batas akurasi.
Hasil klasifikasi citra Sentinel-2A dengan metode ObjectBased Image Analysis (OBIA) menunjukkan bahwa wilayah 1 pada Tabel 2. nilai UA tertinggi diperoleh pada kelas lamun yaitu 100%, selanjutnya nilai UA terendah diperoleh pada kelas rubble dengan nilai 81,82%. Sedangkan untuk nilai PA tertinggi diperoleh pada kelas karang hidup dan kelas lamun dengan masing-masing 100%. Nilai PA terendah diperoleh pada kelas karang mati yaitu
Hasil akurasi dari klasifikasi yang digunakan menunjukkan bahwa jumlah kelas sangat mempengaruhi akurasi dari hasil klasifikasi. Hal ini sesuai dengan hasil penelitian Andréfouët et al. (2003) yang menerapkan jumlah kelas yang berbeda dengan menghasilkan akurasi keseluruhan yang semakin menurun dengan bertambahnya jumlah kelas yang digunakan yaitu diperoleh akurasi rata-rata 77% (4-5 kelas), 71% (7-8 kelas), 56% (9-11 kelas), dan 53% (>13 kelas) menggunakan citra Landsat dan IKONOS. Pemetaan habitat bentik perairan dangkal telah banyak dilakukan dengan menggunakan (OBIA) dan dapat meningkatkan akurasi pemetaan. Phinn et al. (2011) melakukan pemetaan 12 kelas habitat bentik menggunakan citra Quickbird-2 dan menghasilkan akurasi pemetaan antara 52-75%. Zhang et al. (2013) memetakan 12 kelas habitat bentik menggunakan citra AVIRIS (airborne visible/infrared imaging spectrometer) dengan algoritma random forest (RF) menghasilkan akurasi keseluruhan yaitu 75.1-87.9%. Wahiddin et al. (2015) melakukan pemetaan pada 7 kelas habitat bentik terumbu karang menggunakan Landsat 8 OLI dengan algoritma SVM dan menghasilkan akurasi keseluruhan sebesar 73%. Anggoro et al. (2017) memetakan 9 kelas habitat bentik menggunakan citra Worldview-2 dengan algoritma SVM dan menghasilkan akurasi keseluruhan sebesar 75%. Mastu. (2018) melakukan pemetaan menggunakan 12 dan 9 kelas yang menghasilkan akurasi yaitu 77,4% dan 81,1% pada citra UAV, serta 60,4% dan 64,1% pada citra Sentinel-2 dengan agoritma SVM.
Hasil klasifikasi sebaran terumbu karang di perairan Pulau Menjangan dari Wilayah 1 karang hidup (KH) memiliki luas yaitu 0,76 Ha untuk citra UAV sedangkan karang hidup (KH) pada citra Sentinel-2A yaitu 0,64 Ha. Selanjutnya pada Wilayah 2 luas karang hidup (KH) pada citra UAV yaitu 0,67 Ha sedangkan luas karang hidup (KH) pada citra Sentinel-2A yaitu 0,49 Ha. Pada Wilayah 3 dimana karang hidup (KH) pada citra UAV memiliki luas yaitu 0,77 Ha dan pada citra Sentinel-2A memiliki luas yaitu 0,60 Ha. Sedangkan Wilayah 4 karang hidup (KH) pada citra UAV memiliki luas 0,83 Ha dan karang hidup (KH) pada citra Sentinel-2A seluas 0,62 Ha. Hasil akurasi pemetaan terumbu karang di perairan Pulau Menjangan menggunakan metode Object-Based Image Analysis (OBIA) dapat dipetakan secara baik, dengan hasil nilai akurasi rata-rata keseluruhan (OA) pada citra UAV yaitu 97,94%. Sedangkan pada citra Sentinel-2A menghasilkan akurasi keseluruhan dengan nilai rata-rata yaitu 84,89%.
Daftar Pustaka
[LIPI] Lembaga Ilmu Pengetahuan Indonesia. 2014. Panduan Teknis Pemetaan Habitat Dasar Perairan Laut Dangkal. Jakarta: LIPI
Adade, R., Aibinu, A. M., Ekumah, B., & Asaana, J. (2021). Unmanned Aerial Vehicle (UAV) applications in coastal zone management—A review. Environmental Monitoring and Assessment, 193(3), 154.
Ahmad, T. E., Rais, A., Azhari, D. R., Minsaris, L. O. A., Lestari, D. A., & Arifin, W. A. (2021). Penggunaan Iso Cluster Unsupervised Classification Dalam Mengenali Garis Pantai, Studi Kasus: Rarowatu Utara, Sulawesi Tenggara. Proceeding Seminar Nasional Ilmu Komputer, 1(1), Article 1.
Alimudi, S., Setyo B. S., dan James P. P. 2017. Deteksi Perubahan Luasan Mangrove Menggunakan Citra Landsat Berdasarkan Metode OBIA Di Teluk Valentine Pulau Buano Seram Bagian Barat. Jurnal Teknologi Perikanan dan Kelautan, 8(1): 139-146.
Anggoro, A., Siregar, V. P., & Agus, S. B. (2015). Pemetaan Zona Geomorfologi Ekosistem Terumbu Karang Menggunakan Metode Obia, Studi Kasus di Pulau Pari. Jurnal Penginderaan Jauh dan Pengolahan Data Citra Digital, 12(1), Article 1.
Blaschke, T., Hay, G. J., Kelly, M., Lang, S., Hofmann, P., Addink, E., Queiroz Feitosa, R., van der Meer, F., van der Werff, H., van Coillie, F., & Tiede, D. (2014). Geographic Object-Based Image Analysis – Towards a new paradigm. ISPRS Journal of Photogrammetry and Remote Sensing, 87, 180–191.
Boström-Einarsson, L., Babcock, R. C., Bayraktarov, E., Ceccarelli, D., Cook, N., Ferse, S. C. A., Hancock, B., Harrison, P., Hein, M., Shaver, E., Smith, A., Suggett, D., Stewart-Sinclair, P. J., Vardi, T., & McLeod, I.
M. (2020). Coral restoration – A systematic review of current methods, successes, failures and future directions. PLOS ONE, 15(1), e0226631.
Casella, E., Collin, A., Harris, D., Ferse, S., Bejarano, S., Parravicini, V., Hench, J. L., & Rovere, A. (2017). Mapping coral reefs using consumer-grade drones and structure from motion photogrammetry techniques. Coral Reefs, 36(1), 269–275.
Casella, E., Lewin, P., Ghilardi, M., Rovere, A., & Bejarano, S. (2022). Assessing the relative accuracy of coral heights reconstructed from drones and structure from motion photogrammetry on coral reefs. Coral Reefs, 41(4), 869–875. https://doi.org/10.1007/s00338-022-02244-9
Congalton, R. G., & Green, K. (2019). Assessing the Accuracy of Remotely Sensed Data: Principles and Practices, Third Edition. CRC Press.
Fallati, L., Saponari, L., Savini, A., Marchese, F., Corselli, C., & Galli, P. (2020). Multi-Temporal UAV Data and Object-Based Image Analysis (OBIA) for Estimation of Substrate Changes in a Post-Bleaching Scenario on a Maldivian Reef. Remote Sensing, 12(13), Article 13.
Hedley, J. D., Roelfsema, C., Brando, V., Giardino, C., Kutser, T., Phinn, S., Mumby, P. J., Barrilero, O., Laporte, J., & Koetz, B. (2018). Coral reef applications of Sentinel-2: Coverage, characteristics, bathymetry and benthic mapping with comparison to Landsat 8. Remote Sensing of Environment, 216, 598–614.
Hedley, J. D., Roelfsema, C. M., Chollett, I., Harborne, A. R., Heron, S. F., Weeks, S., Skirving, W. J., Strong, A. E., Eakin, C. M., Christensen, T.
R. L., Ticzon, V., Bejarano, S., & Mumby, P. J. (2016). Remote Sensing of Coral Reefs for Monitoring and Management: A Review. Remote Sensing, 8(2), Article 2.
Hernowo, R., Djumanto, D., & Probosunu, N. (2013). Diversitas Ikan pada Ekosistem Terumbu Karang di Perairan Pulau Menjangan, Taman Nasional Bali Barat. Biota : Jurnal Ilmiah Ilmu-Ilmu Hayati, 11–20.
Husna, V. N., Wibowo, P. A., & Fawzi, N. I. (2019). Identification of mangrove forest change using object-based analysis in Bontang, East Kalimantan. IOP Conference Series: Earth and Environmental Science, 284(1), 012037.
Hussain, M., Chen, D., Cheng, A., Wei, H., & Stanley, D. (2013). Change detection from remotely sensed images: From pixel-based to objectbased approaches. ISPRS Journal of photogrammetry and remote sensing, 80, 91-106.
Kabiri, K., Rezai, H., & Moradi, M. (2020). A drone-based method for mapping the coral reefs in the shallow coastal waters – case study: Kish Island, Persian Gulf. Earth Science Informatics, 13(4), 1265–1274.
Kennedy, E. V., Roelfsema, C. M., Lyons, M. B., Kovacs, E. M., Borrego-Acevedo, R., Roe, M., Phinn, S. R., Larsen, K., Murray, N. J., Yuwono, D., Wolff, J., & Tudman, P. (2021). Reef Cover, a coral reef
classification for global habitat mapping from remote sensing. Scientific Data, 8(1), Article 1.
Munasik, M., Helmi, M., Siringoringo, R. M., & Suharsono, S. (2020). Pemetaan Kerusakan Terumbu Karang Akibat Kandasnya Kapal Tongkang di Taman Nasional Karimunjawa, Jawa Tengah. Journal of Marine Research, 9(3), Article 3.
Nababan, B., Mastu, L. O. K., Idris, N. H., & Panjaitan, J. P. (2021). Shallow- Water Benthic Habitat Mapping Using Drone with Object Based Image Analyses. Remote Sensing, 13(21), Article 21.
Paembonan, R. E., Ismail, F., Baddu, S., Najamuddin, Tahir, I., Akbar, N., Inayah, & Nurhayati, A. (2021). Analysis of hard coral condition on coral reef ecosystem in Ternate Island. IOP Conference Series: Earth and Environmental Science, 890(1), 012055.
Phinn, S. R., Roelfsema, C. M., & Mumby, P. J. (2012). Multi-scale, object- based image analysis for mapping geomorphic and ecological zones on coral reefs. International Journal of Remote Sensing, 33(12), 3768– 3797.
Suroso, I. (2016). Peran Drone/Unmanned Aerial Vehicle (UAV) buatan STTKD dalam dunia penerbangan. Prosiding Seminar Nasional “Pengembangan Kebijakan Dan Regulasi Penerbangan Dan Antariksa : Problema Dan Tantangan” 2016, 104–112.
Syah, A. F. (2010). Penginderaan jauh dan aplikasinya di wilayah pesisir dan lautan. Jurnal Kelautan: Indonesian Journal of Marine Science and Technology, 3(1), Article 1.
Thalib, M. S., Faizal, A., & Nafie, Y. A. L. (2019). Remote Sensing Analysis of Seagrass Beds in Bontosua Island, Spermonde Archipelago. IOP Conference Series: Earth and Environmental Science, 253(1), 012047.
Tzotsos, A., & Argialas, D. (2008). Support Vector Machine Classification for Object-Based Image Analysis. In T. Blaschke, S. Lang, & G. J. Hay (Eds.), Object-Based Image Analysis: Spatial Concepts for Knowledge- Driven Remote Sensing Applications (pp. 663–677). Springer.
Wahiddin N. 2015. Klasifikasi ekosistem terumbu karang berbasis objek dan piksel di Pulau Morotai [disertasi]. Bogor (ID). Institut Pertanian Bogor. 102 p.
Wahidin, N., Siregar, V. P., Nababan, B., Jaya, I., & Wouthuyzen, S. (2015). Object-based Image Analysis for Coral Reef Benthic Habitat Mapping with Several Classification Algorithms. Procedia Environmental Sciences, 24, 222–227.
Wijaya, C. K., Komala, R., & Giyanto, G. (2017). Kondisi, keanekargaman dan bentuk pertumbuhan karang di pulau kayu angin genteng, kepulauan seribu. Bioma, 13(2), Article 2.
Yudasmara, G. A. (2013). Analisis potensi dan kondisi ekosistem terumbu karang pulau menjangan untuk pengembangan ekowisata bahari berbasi pendidikan terpadu. Prosiding Seminar Nasional MIPA.
Discussion and feedback