Pendeteksian Pelanggaran Rambu Larangan Berhenti Berbasis Mobile dengan Pendekatan Spatial Map Matching
on
p-ISSN: 2301-5373
e-ISSN: 2654-5101
Jurnal Elektronik Ilmu Komputer Udayana
Volume 11, No 3. February 2023
Pendeteksian Pelanggaran Rambu Larangan Berhenti Berbasis Mobile dengan Pendekatan Spatial Map
Matching
Nusan Bagus Wibisanaa1, I Komang Ari Mogia2, Ida Bagus Gede Dwidasmaraa3, Cokorda Rai Adi Pramarthaa4, I Gusti Agung Gede Arya Kadyanana5, I Wayan Suprianaa6
aProgram Studi Informatika, Universitas Udayana
Jimbaran, Badung, Bali, Indonesia 1bagusnusan25@gmail.com 2arimogi@unud.ac.id 3dwidasmara@unud.ac.id 4cokorda@unud.ac.id 5gungde@unud.ac.id 6wayan.supriyana@unud.ac.id
Abstrak
Kemacetan merupakan salah satu hal yang tidak disukai oleh semua orang, kemacetan juga dapat meningkatkan risiko kecelakaan berkendara. Adapun salah satu penyebab kemacetan ialah karena pengendara berhenti pada pinggir jalan yang mengurangi tingkat efektifitas jalan, oleh karena itu dibutuhkan penempatan rambu larangan berhenti yang berguna untuk mempertegas bahwa pada zona yang ditentukan benar-benar dilarang untuk berhenti sehingga dapat mengurangi kemacetan yang ada. Namun penempatan rambu ini terkadang masih memiliki kekurangan dikarenakan kurangnya instrumen pendeteksian untuk mendeteksi pelanggaran terhadap rambu yang ada. Oleh karena itu dibutuhkan sebuah sistem pendeteksi pelanggaran rambu larangan berhenti yang dimana dengan menggunakan bantuan GPS dapat diketahui posisi pengguna dan dilakukan perhitungan menggunakan pendekatan metode spatial map matching untuk memutuskan apakah pengguna sedang berhenti pada zona larangan berhenti atau tidak. Adapun berdasarkan hasil pengujian yang dilakukan menggunakan 100 data didapat tingkat akurasi dari sistem yang dibangun mencapai 97%
Kata Kunci : Deteksi Pelanggaran lalu lintas, GPS, Spatial Map Matching, Rambu Larangan Berhenti, Aplikasi Mobile.
Kemacetan merupakan hal yang tidak disenangi oleh semua orang. Kemacetan juga merupakan salah satu faktor yang meningkatkan risiko kecelakaan dalam berkendara. Adapun salah satu penyebab kemacetan yang terjadi ialah terdapat pengendara yang berhenti pada pinggir jalan yang sebagaimana tertuang dalam pasal 118 Undang-Undang Nomor 22 Tahun 2009 tentang Lalu Lintas dan Angkatan Jalan ( LLAJ ) ayat 15 dijelaskan dimana setiap kendaraan bermotor dapat berhenti dijalan raya terkecuali terdapat rambu atau marka larangan berhenti atau tempat-tempat yang sekiranya dapat membahayakan keselamatan dan mengganggu lalu lintas serta pengendara. [6]
Pada kondisi jalan raya sesungguhnya meskipun sudah terpasang rambu larangan berhenti terkadang pengendara tidak menyadari akan keberadaan rambu tersebut dan tetap melanggar sehingga dibutuhkan sebuah instrumen yang dapat mendeteksi dan menberitahu bahwa pengendara sedang berhenti pada zona larangan berhenti sehingga pengendara dapat mengetahui bahwa ia telah melakukan pelanggaran dan segera meninggalkan zona larangan berhenti.
GPS merupakan salah satu instrumen yang dapat mengetahui posisi pengguna menggunakan bantuan satelit yang dimana nilai dari GPS akan berupa garis lintang dan garis bujur [1][2][7][8]. Nilai dari gps ini tidak dapat serta merta menentukan posisi pengendara pada jalan sesungguhnya sehingga dibutuhkan pemetaan dan penentuan apakah kondisi pengendara sedang melakukan pelanggaran atau tidak.
Salah satu metode yang dapat digunakan dalam mencocokan antara lokasi pengguna dengan rambu ialah dengan menggunakan pendekatan metode spatial map matching yang dimana metode ini akan mencocokan antara lokasi titik pengguna dengan lokasi titik rambu larangan berhenti. Sehingga dapat diputuskan apakah pengguna melakukan pelanggaran atau tidak [3][4].
Perangkat mobile smartphone merupakan salah satu perangkat yang hampir dimiliki oleh semua orang. Perangkat mobile smartphone jaman sekarang umumnya sudah terintegrasi sensor GPS sehingga tidak diperlukan menanam atau membawa sensor GPS tambahan[5].
Adapun hasil dari penelitian ini diharapkan diketahui tingkat efektivitas dari metode yang diterapkan dengan cara mengukur tingkat akurasi dari sistem yang dibangun sehingga sistem yang dibangun dapat digunakan sebagaimana mestinya.
Adapun metodologi penelitian yang dilakukan lebih berfokus kepada pengembangan perangkat lunak yang dimana pengembangan perangkat lunak ini menggunakan pendekatan kerangka kerja prototipe. Gambaran alur pengembangan sistem dapat dilihat pada gambar 1
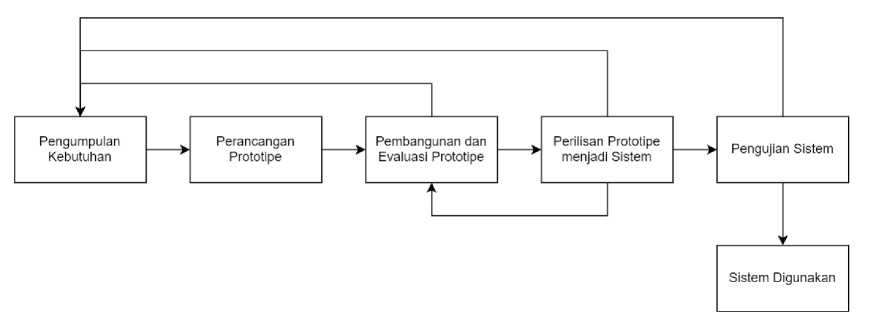
Gambar 1. Pengembangan Sistem
Adapun penjelasan dari tiap-tiap bagian pada gambar dapat dijelaskan sebagai berikut:
Pengumpulan kebutuhan dilakukan untuk mengetahui kebutuhan yang sekiranya diperlukan oleh sistem sehingga sistem dapat berjalan dengan sebagaimana mestinya. Adapun pengumpulan kebutuhan terdiri dari 3 yaitu:
-
a. Kebutuhan masukan sistem
adapun masukan sistem yang dibutuhkan antara lain:
-
1. Data lokasi pengguna
Adapun lokasi pengguna yang akan menjadi inputan dapat dilihat pada tabel 1.
Table 1. Posisi Pengguna
|
id |
Id_perjalanan |
latitude |
longitude |
Waktu |
|
1 |
3 |
-8.675829 |
115.2593835 |
09/05/2022 10:42:18 |
|
2 |
3 |
-8.6758314 |
115.2593835 |
09/05/2022 10:42:23 |
|
3 |
3 |
-8.6758345 |
115.2593694 |
09/05/2022 10:42:28 |
-
2. Titik rambu zona larangan berhenti
Table 2. Lokasi titik rambu
|
Id |
Status |
latitude |
longitude |
|
205 |
1 |
-8.675415687617011 |
115.25950938460483 |
|
207 |
1 |
-8.675672844784271 |
115.25942891833438 |
|
209 |
0 |
-8.675928318837846 |
115.25934576985493 |
-
b. Kebutuhan pengolahan data
pengolahan data dilakukan melakukan proses dari inputan data yang telah diterima oleh sistem. Adapun pengolahan data pada sistem dilakukan dengan menggunakan pendekatan spasial map matching yang dimana akan dijelaskan sebagai berikut:
rumus utama untuk melakukan map matching kali ini yaitu dengan menghitung tingkat probabilitas observasi antara titik pengguna dengan titik kandidat dengan radius tertentu. Adapun pemilihan titik kandidat yaitu menggunakan jarak radius sejauh 30 meter dari titik pengguna. Rumus untuk probabilitas observasi ialah [4]:
N(cD =
1 (xi-μ)2
1== e 2σ2
√2πσ2
Adapun beberapa penjelasan-penjelasan dari penggunaan rumus diatas antara lain:
-
1. Perhitungan jarak
Perhitungan jarak digunakan untuk mengetahui jarak antara titik pengguna dengan titik kandidat kemudian diambil hanya titik dengan jarak kurang atau sama dengan 30 meter, perhitungan jarak menggunakan pendekatan perhitungan Euclidean yaitu dengan menghitung jarak titik vektor (X1,Y1) dengan titik vektor (X2,Y2) yang dimana X merupakan nilai latitude dan Y merupakan Nilai Longitude. Kemudian hasil perhitungan dikonversi menjadi satuan meter dengan melakukan perkaliaan dengan 11.1 dan dibagi dengan 0.0001 yang dimana tiap jarak 0.0001 pada peta setara dengan 11.1 meter pada dunia nyata. Rumus perhitungan jarak dapat dilihat sebagai berikut.
11.1
0.0001
jarak = √(X1 — X2)2 + (K1 — K2)2 *
-
2. Perhitungan jarak rata-rata ( Mean )
Setelah kita mengetahui jarak masing-masing antara titik pengguna dan titik kandidat maka dilakukan perhitungan rata-rata antara titik pengguna dengan seluruh titik kandidat yang ada. Adapun rumus mencari nilai rata-rata dapat dilihat sebagai berikut.
μ (rata — rata) = — ∑(Xi)
-
3. Perhitungan standar deviasi
Setelah mengetahui nilai rata-rata maka dapat dilanjutkan dengan perhitungan standart deviasi yang dimana rumus untuk mencari nilai standar deviasi dapat dilihat sebagai berikut.
σ2(deviasi) = 1 ∑( Xi — μ )2
-
c. Kebutuhan keluaran sistem
Kebutuhan keluaran sistem merupakan kebutuhan yang berisikan hasil keluaran dari sistem yang dimana pada penelitian ini keluaran dari sistem ialah hasil penentuan yang menunjukan apakah pengguna berhenti pada zona larangan berhenti atau tidak. Adapun kondisi keluaran sistem dapat dilihat pada tabel 3.
Table 3. Keluaran Sistem
|
Kondisi Pengguna |
Waktu |
Keluaran yang diharapkan |
|
Berada pada Rambu Larangan |
Waktu pengguna > waktu threshold |
Pengguna berhenti pada zona larangan berhenti |
|
Berada pada Rambu Larangan |
Waktu pengguna < waktu threshold |
Pengguna berada pada zona larangan berhenti |
|
Diluar Zona larangan |
- |
Zona Aman |
|
Hanya melintasi zona larangan |
- |
Pengguna tidak ditampilkan sedang berhenti pada zona larangan berhenti |
Tahapan perancangan prototipe dilakukan untuk mengetahui apa saja yang diperlukan sehingga kebutuhan-kebutuhan pada pengumpulan kebutuhan dapat terpenuhi dan terlaksana. Adapun perancangan prototipe dari sistem antara lain:
-
a. Perancangan FlowChart
Flowchart atau diagram alur berisikan alur kerja dari sistem yang dibangun. Adapun alur kerja dari sistem ini dapat dilihat pada gambar 2.
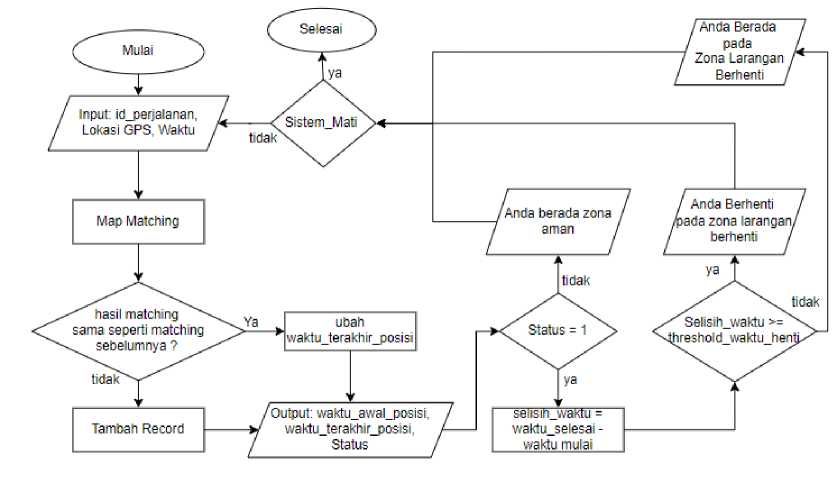
Gambar 2.Flowchart Sistem
-
b. Penentuan fitur sistem
setelah flowchart terbentuk maka kita dapat mengetahui fitur fitur yang dibutuhkan pada sistem, adapun fitur-fitur tersebut antara lain:
-
1. Fitur Penambahan titik rambu larangan
Fitur penambahan titik rambu larangan merupakan salah satu fitur yang sangat penting dikarenakan melalui fitur ini akan ditentukan dilokasi mana saja rambu larangan berhenti berada.
-
2. Fitur perekaman posisi pengguna
Fitur perekaman berfungsi untuk melakukan perekaman pada posisi pengguna sehingga dapat diketahui dimana lokasi pengguna yang sedang menggunakan sistem.
-
3. Fitur perhitungan pemrosesan data
Fitur perhitungan pemrosesan data bertujuan untuk melakukan perhitungan terhadap lokasi pengguna sehingga dapat diputuskan apakah pengguna sedang berhenti atau tidak pada rambu larangan
-
4. Fitur menampilkan hasil perhitungan
Fitur menampilkan hasil perhitungan digunakan untuk mengetahui kondisi pengguna saat ini apakah sedang melanggar terhadap zona larangan atau tidak.
Dari rancangan prototipe yang telah dibuat maka dilanjutkan dengan pengembangan terhadap prototipe dan evaluasi terhadap prototipe yang ada. Adapun prototipe yang dibangun berbentuk pecahan-pecahan dari fitur yang belum disatukan menjadi sebuah sistem utuh. dan evaluasi dilakukan agar mengetahui apakah fitur yang dibuat telah dapat bekerja menggunakan data buatan atau tidak.
Pengembangan prototipe pada tahap ini dilakukan bertujuan untuk menggabungkan antara beberapa prototipe lain yang sudah dapat berjalan menjadi sebuah sistem yang utuh sehingga aplikasi dapat berjalan sebagaimana mestinya’
Pengujian sistem dilakukan dengan cara menguji kesesuai antara masukan pengguna dengan keluaran sistem yang diharapkan dalam mendeteksi pelanggaran rambu larangan berhenti. Hasil dari pengujian kemudian dihitung tingkat ketepatan masukan dengan keluarannya untuk mengetahui tingkat akurasi dari sistem yang dibangun. Adapun skenario pengujian dari sistem dapat dilihat pada tabel 1.
Tabel 1. Tabel skenario pengujian
|
No |
Kondisi pengujian |
Hasil keluaran |
Nilai |
|
1 |
Pengguna berhenti pada zona larangan |
Pengguna berhenti pada zona larangan |
True Positive |
|
2 |
Pengguna tidak berada pada zona larangan |
Pengguna berhenti pada zona larangan |
False Positive |
|
3 |
Pengguna tidak berhenti pada zona larangan |
Pengguna tidak berhenti pada zona larangan / Zona Aman |
True Negative |
|
4 |
Pengguna berhenti pada zona larangan |
Pengguna tidak berhenti pada zona larangan / Zona Aman |
False Negative |
Untuk menentukan titik zona larangan berhenti admin pertama perlu menambahkan titik zona larangan berhenti pada peta, kemudian menambahkan arah berhenti zona larangan. Adapun penambahan dapat dilihat pada gambar 3.
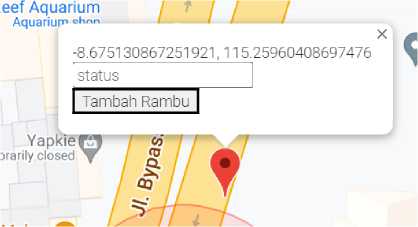
Gambar 3. Gambar penentuan titik rambu larangan berhenti
Pada gambar 3 Dapat dijelaskan saat admin melakukan klik pada peta maka akan menampilkan sebuah pop-up yang berisi titik koordinat dan pengguna harus memasukan status yang dimana 1 untuk rambu larangan berhenti dan 0 untuk titik henti zona larangan.
Untuk melakukan validasi kesesuaian titik pada lokasi sebenarnya pengguna dapat melakukan klik animasi orang yang dapat dilihat pada gambar 4
adise S232
Prime Plaza Hotel
Sanur- Bali
Prime GYM and SPA


Keyboard shortcuts Map data ©2022 Google TermsoflJse Reportamaperror
Gambar 4. Ikon Animasi Validasi
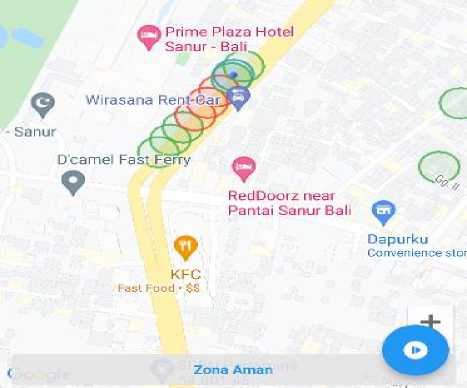
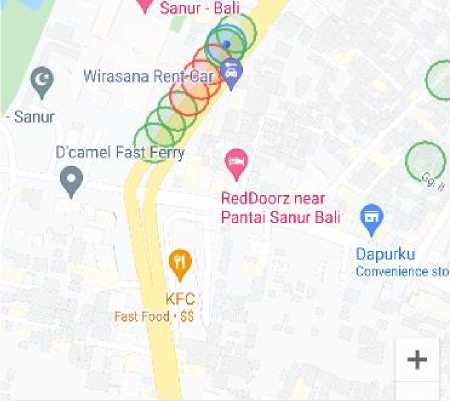
Setelah dilakukan klik maka akan muncul tampilan lokasi titik pada jalan yang dapat dilihat pada gambar 5

Gambar 5. Validasi lokasi titik
Pada gambar 5 lokasi titik rambu rambu larangan dan titik berhenti rambu dilingkari dengan warna merah.
Setelah admin menambahkan titik pengguna selanjutnya dilakukan perhitungan secara manual dengan mengambil titik sampel koordinat pengguna dan dilakukan perhitungan yang dimana nilai hasil perhitungan dapat dilihat pada tabel 2.
Tabel 2. Perhitungan Map Matching
|
Titik Pengguna |
Id_titik kandidat |
Titik Kandidat |
Jarak |
Mean ( μ) |
Dev ( σ2 ) |
N |
|
-8.675829, 115.2593835 |
207 |
-8.675415687617011, 115.25950938460483 |
18.05151 |
14.9223 |
3.12921 |
0.07735 |
|
209 |
-8.675672844784271, 115.25942891833438 |
11.79309 |
3.12921 |
0.07735 |
Dari hasil perhitungan didapat bahwa nilai kandidat memiliki nilai N atau nilai probabilitas yang sama, oleh karena itu sistem akan memilih titik dengan id titik kandidat yang lebih kecil yaitu titik 207. Kemudian dilakukan penambahan pada sistem terhadap waktu durasi pada titik yang dimana dapat dilihat pada tabel 3
Tabel 3. Kondisi pengguna
|
Id_perjalanan |
Titik_matching |
Status |
Waktu mulai |
Waktu selesai |
|
3 |
207 |
1 |
09/05/2022 10:42:18 |
09/05/2022 10:43:08 |
Pada tabel 3 dapat dijelaskan id perjalanan merupakan id yang membedakan tiap kendaraan beserta dengan waktu saat kendaraan melakukan perjalanan. Titik matching merupakan titik posisi pengguna berdasarkan titik kandidat hasil perhitungan. Status 1 merupakan status dimana lokasi tersebut merupakan zona larangan berhenti. Waktu mulai dan waktu selesai merupakan waktu untuk mengetahui berapa lama pengguna berada pada titik tersebut.
Fitur ini dilakukan untuk mengetahui posisi pengguna secara otomatis, sehingga nantinya dapat dilakukan perhitungan posisi secara cepat. Adapun hasil dari perekaman data dapat dilihat pada gambar 6.
Gambar 6. Fitur Perekaman data
Setelah perekaman data secara otomatis dilakukan maka selanjutnya dilakukan pemeriksaan terhadap hasil pengambilan data guna melakukan validasi bahwa nilai masukan dari sistem sudah sesuai dengan hasil yang diinginkan. Adapun sebaran data dapat dilihat pada gambar 7.
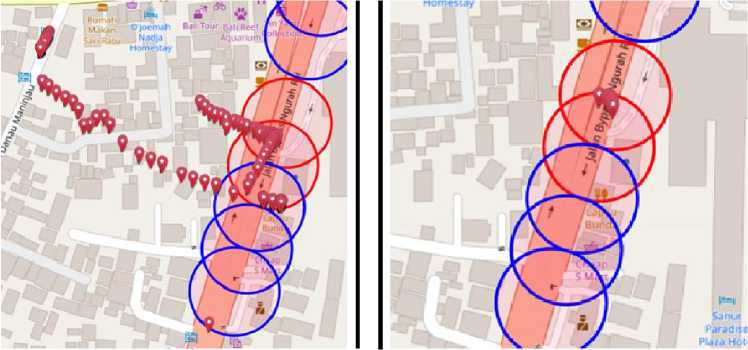
Gambar 7. Hasil sebaran data
Pada gambar 7 dapat dijelaskan, pada awal perekaman sistem menggunakan waktu interval pengambilan data 1 detik. namun setelah melihat hasil perekaman sistem ternyata memiliki kejanggalan dimana pengambilan data yang terlihat seperti bergerak seperti pada gambar 7 bagian kiri namun pada kondisi sebenarnya kondisi perekaman sedang dalam kondisi berhenti.
Melihat hasil rekaman yang seperti ini maka dilakukan perubahan interval dengan menggunakan beberapa waktu berbeda sehingga didapatkan waktu optimal. Setelah dilakukan beberapa kali percobaan maka diputuskan proses pengambilan data lokasi pengguna dilakukan dengan interval sistem akan meminta data baru apabila request permintaan data sebelumnya telah selesai atau menggunakan fungsi location.onlocationchanged pada pemrograman selesai di proses sehingga sebaran dapat jauh lebih mengumpul yang dapat dilihat pada gambar 7 bagian kanan
Sesuai dengan perencanaan pembanguann sistem, keluaran dari sistem dibagi menjadi 3 yaitu peringatan tidak berada pada zona larangan, pengguna memasukin zona larangan dan pengguna berada pada zona larangan berhenti yang dimana akan dijelaskan sebagai berikut:
-
1. Tampilan Pengguna tidak berada pada zona larangan berhenti
Apabila pengguna tidak berada pada zona larangan berhenti maka sistem akan menampilkan Zona aman yang dapat dilihat pada gambar 8.
( Zona Aman
Gambar 8. Tampilan berada pada Zona Aman
-
2. Tampilan saat pengguna memasuki zona larangan berhenti
Apabila pengguna memasuki zona larangan berhenti tetapi belum melewati batas waktu threshold maka akan ditampilkan peringatan pengguna berada pada zona larangan berhenti yang dapat dilihat pada gambar 9.
, IokoAkujrium
9
KFC Wayang Sanur
Makanan S∣ap SaJi * $$
( Anda Berada pada Zona Larangan Berhenli
Gambar 9. Tampilan pengguna memasuki zona larangan berhenti
-
3. Tampilan pengguna berhenti / melanggar pada zona Larangan Berhenti
Apabila pengguna telah melewati batas waktu yang ditetapkan maka akan muncul tampilan pengguna berhenti pada zona larangan berhenti yang dapat dilihat pada gambar 10.

Gambar 10. Tampilan peringatan berhenti
Penjelasan penilaian skenario pengujian yang dilakukan dapat dilihat pada tabel 4.
Tabel 4. Penilaian skenario pengujian
|
Skenario Pengujian |
Hasil Keluaran Sistem |
Nilai |
|
Pengguna Berhenti pada zona larangan |
Pengguna berhenti pada zona larangan |
True Positif |
|
Pengguna berhenti pada zona larangan |
Pengguna tidak berhenti pada zona larangan |
False Negatif |
|
Pengguna tidak berhenti pada zona larangan |
Pengguna tidak berhenti pada zona larnagan |
True Negatif |
|
Pengguna hanya melintasi Zona larangan |
Pengguna tidak berhenti pada zona larangan |
True Negatif |
Adapun hasil nilai pengujian dari sistem menggunakan 100 buah data dapat dilihat pada tabel 5
Tabel 5. Rangkuman nilai hasil pengujian
|
Hasil Prediksi |
Jumlah Data |
|
True Positif ( TP ) |
37 |
|
False Positif ( FP ) |
0 |
|
True Negatif ( TN ) |
60 |
|
False Negatif ( FN ) |
3 |
Setelah diketahui jumlah hasil prediksi maka dilakukan perhitungan akurasi sehingga didapat angka sebagai berikut.
Akurasi =
TP+TN
TP+FP+TN+FN
* 100 % =
37+60
37+0+60+3
* 100%
97%
Berdasarkan hasil dari pengembangan sistem yang dilakukan dapat diketahui dalam menentukan titik larangan berhenti pertama admin harus menempatkan rambu larangan berhenti sesuai dengan lokasi yang diinginkan, kemudian admin dapat memastikan lokasi titik rambu dengan fitur melihat titik pada peta. Dari hasil pengujian yang dilakukan didapatkan tingkat akurasi dari sistem ialah 97% yang dimana 37 data bernilai true positif, 3 data false negatif dan 60 data bernilai true negatif.
Referensi
[ 1 ] Abidin, H.Z. 2007. Penentuan Posisi dengan GPS dan Aplikasinya , PT Pradnya Paramita, Jakarta
[ 2 ] Andi. 2009. Global Positioning System, Penerbit Andi, Yogyakarta
[ 3 ] Danil, Ode, dkk. 2021. Implementasi Global Navigation Satellite Sistem (GNSS) Pada
Sistem Presensi Menggunakan Metode Spatial Map Matching. semanTIK. 7(1). Kendari
-
[ 4 ] Maftukhin, M.R. 2018. Implemetasi Algoritma Spatial Map Matching Untuk Mengetahui Lokasi kendaraan Melalui Aplikasi GPS Tracker.
-
[ 5 ] Qorib, Widiartha. dkk. 2018. Rancang Bangun Sistem Deteksi Posisi Dengan Memanfaatkan GPS Pada Smartphone Berbasis Google Maps API Studi Kasus Pemantauan Pada Anak dan Remaja
-
[ 6 ] Undang-Undang no 22 tahun 2009 tentang lalu lintas dan angkutan jalan. 2009. http://jdih.dephub.go.id/assets/uudocs/uu/uu_no.22_tahun_2009.pdf dilihat 5 April 2021
-
[ 7 ] Winardi. 2006. Penentuan Posisi Dengan GPS Untuk Survei Terumbu Karang, Puslit Oseanografi – Lipi, Jakarta.
-
[ 8 ] https://www.gps.gov/technical/ps/2020-SPS-performance-standard.pdf dilihat 18 Juni
2021
662
Discussion and feedback