Simulasi UAV Swarms untuk Optimalisasi Operasi Pencarian dan Penyelamatan Menggunakan Artificial Bee Colony
on
Jurnal Ilmu Komputer VOL. XII No. 1
p-ISSN: 1979-5661
e-ISSN: 2622-321X
Simulasi UAV Swarms untuk Optimalisasi Operasi Pencarian dan Penyelamatan Menggunakan Artificial Bee Colony
Ketut Bayu Yogha Bintoro1, Silvester Dian Handy Permana2
a1Teknik Informatika, Universitas Trilogi Jl. TMP Kalibata Jakarta Selatan, Indonesia 1ketutbayu@trilogi.ac.id
bTeknik Informatika, Universitas Trilogi Jl. TMP Kalibata Jakarta Selatan, Indonesia 2handy@trilogi.ac.id
Abstrak
Operasi Search and Rescue (SAR) pada umumnya selalu berpacu dengan waktu yang terbatas dengan kondisi alam dan cuaca yang dinamis seperti kasus hilangnya pesawat Sukhoi Super Jet-100 di gunung salak pada saat promotion flight tahun 2012 yang lalu. Wahana penginderaan jarak jauh berbasis Unmanned Aerial Vehicle (UAV) / drone berpenggerak empat (4) rotor yang dapat membantu tim pencari darat memvisualisasi atau mendeteksi lokasi kecelakaan yang terutama berada di wilayah pegunungan atau perbukitan. Akan tetapi luasnya wilayah pencarian dapat menjadi penghalang dalam pencarian jalur optimal menemukan lokasi kecelakaan, untuk itu diperlukan pendekatan cerdas dalam mengoptimalisasikan jalur pencarian UAV tersebut. Penelitian ini mengusulkan simulasi UAV Swarms untuk optimalisasi operasi pencarian dan penyelamatan menggunakan Artificial Bee Colony (ABC). Dengan ABC diharapkan proses pencarian pada wilayah yang luas menjadi lebih optimal dibandingkan dengan pencarian acak yang membutuhkan banyak waktu dan meningkatkan resiko kecelakaan tim penyelamat selama operasi pencarian.
Kata Kunci : Search and Rescue, UAV swarms, Artificial Bee Colony
Operasi Search and Rescue (SAR) pada umumnya selalu berpacu dengan waktu yang terbatas dengan kondisi alam dan cuaca yang dinamis (Merino. L, 2010). Kondisi tersebut dapat menjadi hambatan dalam operasi penyalamatan yang dilakukan sehingga secara tidak langsung dapat berpengaruh pada tingkat keberhasilan penyelamatan. Sebagai contoh, kasus hilangnya pesawat Sukhoi Super Jet-100 di gunung salak pada saat promotion flight tahun 2012 yang lalu. Petugas SAR berjuang untuk menemukan lokasi jatuhnya pesawat tersebut untuk kemudian melakukan tindakan evakuasi korban. Untuk mendeteksi lokasi jatuhnya pesawat tersebut petugas mengalami kesulitan karena harus melalui jalan darat dengan kontur yang sulit dan kondisi cuaca yang buruk.
Kontur pegunungan yang curam dan cuaca menyebabkan kemampuan visibilitas dan daya jelajah petugas menjadi terbatas sehingga berpengaruh pada tenggat waktu penemuan lokasi jatuhnya pesawat. Pada cuaca buruk Helikopter penyelamat terkadang tidak diijinkan terbang karena alasan keselamatan sehingga ujung tombak pencarian berada pada tim SAR darat.
Atas dasar peristiwa tersebut, sangat penting membekali tim SAR darat menggunakan perangkat terbang portable yang setiap saat digunakan petugas penyelamat untuk membantu mendeteksi lokasi kecelakaan pada lokasi yang sulit dijangkau ataupun pada cuaca yang buruk. Disamping itu, dengan bantuan alat ini diharapkan dapat meminimalisir resiko
kecelakaan pada anggota tim saat menyusuri wilayah yang terjal atau sulit dicapai anggota tim. Gambar 1 merupakan contoh gambar-gambar yang diambil dari drone. Kemampuan untuk mengambil gambar kecelakaan pesawat ataupun kebakaran hutan dapat menjadi dasar perencanaan operasi penyelamatan. Untuk mendukung tim SAR darat itulah penulis mengusulkan sistem penginderaan jarak jauh berbasis Unmanned Aerial Vehicle (UAV) / drone berpenggerak empat (4) rotor yang dapat membantu tim pencari darat mengidentifikasi dan mendeteksi lokasi kecelakaan dan dapat juga untuk keperluan perencanaan pengambilan jalur evakuasi, melacak keberadaan survivor pada daerah yang sulit dijangkau seperti di patahan, jurang dengan tingkat kemiringan ekstrem yang dapat membahayakan keselamatan anggota tim.
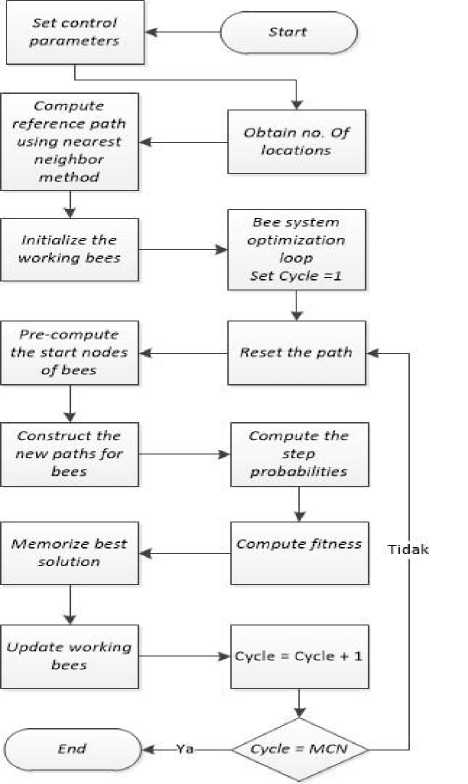
Gambar 1. Alur ABC
Gambar 1 menunjukan bahwa diagram alur algoritma ABC untuk optimalisasi. Pada tahap inisialisasi tetapkan paramater, seperti jumlah kendaraan, jumlah TPS, jumlah volume pada semua TPS, jumlah iterasi (waktu perjalanan lebah), lebah pengamat akan bekerja untuk menilai yang diinputkan. Tahap berikutnya maps bernilai inputan robot dengan jumlah TPS yang akan dikunjungi oleh robot. Kemudian jalur refrensi akan didapat dalam perhitungan jalur
menggunakan algoritma nearest neighbor. Ketika lebah bekerja akan diberikan nilai, dilakukan perulangan. Kemudian pelanggan yang nilai jaraknya minimum akan dicari ketika lebah memulai pekerjaannya, dengan menghitung probabilitas dengan persamaan Pi = ς/^e y ,
dimana Pi = probabilitas lebah yang dipekerjakan, S = jumlah lebah, θi= posisi lebah dan F(Pi) = nilai fitness. Lebah akan bekerja dan menggambar jalur baru berikutnya untuk mendapatkan jalur terbaru dengan menggunakan persamaan xij(t + 1) = θij(t) + 0(θij(t) - θkj(t), dimana xij = posisi lebah pengamat, t = banyaknya iterasi, θk= bilangan acak antara (0,1), j = solusi dimensi dan 0 = seleksi rencana yang terbaik. Persamaan ini akan mengingat solusi terbaik yang ditemukan selama proses berlangsung. Selanjutnya lebah yang bekerja akan menjadi lebah pengintai dan jumlah lebah yang berkerja akan diperbarui , lebah perkerja yang sudah digunakan menjadi lebah pengintai. Kemudian selesaikan perulangan ketika jumlah iterasi sudah terpenuhi dan hasil terbaik akan diperoleh, jika iterasi belum selesai lebah pengintai akan mulai mencari jalur baru dengan persamaan θij = θjmin + rand. (θj max - θj min).
Model BeeSmart menunjukkan kecerdasan kawanan lebah madu selama proses pencarian sarang mereka. Sekelompok puluhan ribu lebah madu dapat secara akurat memilih lokasi sarang baru terbaik yang tersedia di antara puluhan pilihan potensial melalui perilaku mengorganisir diri.Mekanisme dalam model ini didasarkan pada Honeybee Democracy (Seeley, 2010) dengan beberapa modifikasi dan penyederhanaan. Salah satu penyederhanaan adalah bahwa model ini hanya menunjukkan lebah pengintai - populasi 3-5% dari seluruh kelompok yang terlibat aktif dalam proses pengambilan keputusan. Lebah lain ditinggalkan karena mereka hanya mengikuti pengintai ke sarang baru ketika keputusan dibuat. Meninggalkan non-scouts mengurangi beban komputasi dan membuat model ini lebih jelas secara visual.
Gambar 2 merupakan yang pertama dari serangkaian model dalam unit kurikuler penyelidikan ilmiah berbasis pemodelan komputasi "BeeSmart", yang dirancang untuk membantu siswa sekolah menengah dan universitas mempelajari prinsip-prinsip sistem yang kompleks sebagai konsep lintas sektor dalam pembelajaran sains.
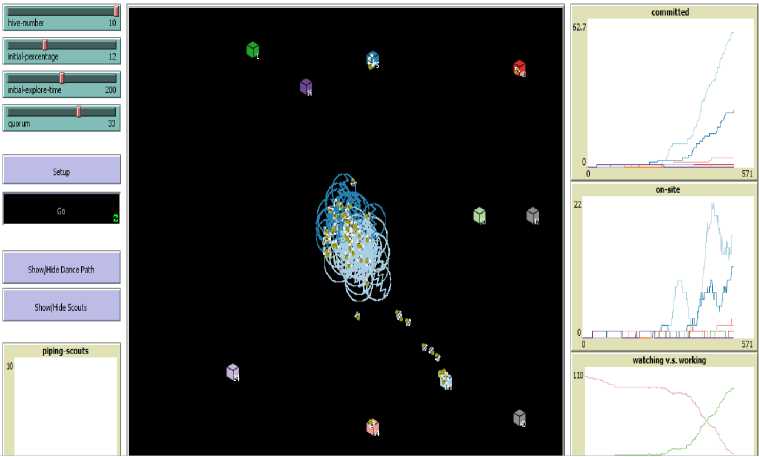
Gambar 2. Tampilan Simulasi
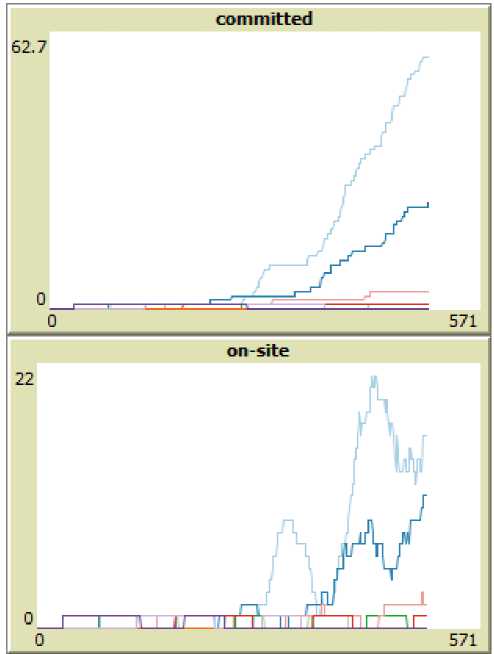
Gambar 3. Rata-Rata Hasil Simulasi
Ketika scout menemukan situs sarang potensial, dia memeriksanya untuk mengetahui lokasi, warna, dan kualitasnya. Kemudian dia terbang kembali ke gerombolan untuk mengiklankan situs itu melalui tarian-tarian goyangan. Semakin baik kualitas sarang, semakin lama pramuka menari, semakin mudah tarian ini dilihat oleh lebah menganggur di kawanan, dan semakin banyak lebah menganggur mengikuti tarian untuk memeriksa situs sarang yang diiklankan. Setelah pemeriksaan lebah yang baru bergabung dengan situs yang diiklankan, lebah baru tersebut terbang kembali ke gerombolan dan mengemukakan pendapatnya sendiri tentang situs tersebut melalui tarian bergoyang. Lebah mengunjungi kembali situs yang mereka advokasi, tetapi minat mereka pada situs menurun setelah masing-masing mengunjungi kembali. Beriklan untuk berbagai situs terus dilakukan secara paralel, tetapi situs berkualitas tinggi menarik lebih banyak lebah, sedangkan yang berkualitas rendah secara bertahap diabaikan.
Ketika lebah di situs sarang tertentu mengamati sejumlah lebah di situs yang sama, atau, dengan kata lain, ketika "kuorum" tercapai, mereka terbang kembali ke gerombolan dan mulai "pipa" untuk mengumumkan bahwa suatu keputusan memiliki telah dibuat. Setiap lebah yang mendengar perpipaan juga akan memipip, yang menyebabkan perpipaan itu menyebar melintasi segerombolan dengan cepat. Ketika semua lebah memipih, seluruh kawanan lepas landas untuk pindah ke situs sarang pemenang dan model berhenti.
Dari 100 kali jalannya simulasi, beberapa faktor penting yang harus diperhatikan dalam menentukan hasil simulasi antara lain jumlah dan jarak sarang potensial, derajat pergerakan, dan kecepatan pergerakan. Pada setiap SETUP, 100 lebah pengintai ditempatkan di tengah tampilan. Sementara itu, sejumlah tertentu (ditentukan oleh slider "hive-number") dari situs
sarang potensial ditempatkan secara acak di sekitar swarm. Saat mengklik GO, pengintai awal (proporsinya ditentukan oleh penggeser "persentase awal") terbang menjauh dari gerombolan di berbagai arah untuk menjelajahi ruang sekitarnya. Mereka akan menjelajahi ruang untuk maksimum "penjelajahan awal". Jika salah satu pengintai menemukan situs sarang potensial, dia memeriksanya. Kalau tidak, dia kembali ke gerombolan dan tetap menganggur.
References
-
[1] Arifitama B. 2015. Pengembangan Alat Peraga Pengenalan Tata Surya Bima Sakti Menggunakan Augmented Reality di PAUD. Jurnal Sisfo. Vol 5.No 4.446-453
-
[2] Basta. P, 2012, Quadcopter Flight,California State University,Thesis, Northridge
-
[3] Blackman S.2011. Beginning 3D Game Development with Unity: All-in-one, multi-platform game development. Edisi 1. Apress.New York USA
-
[4] Domingues, 2009, Quadrotor Prototype, Instituto Superior Tecnico, Universidade de Lisboa
-
[5] Feiyu Tech, 2014, Feiyu 41AP Manual book,Feiyu Tech, China
-
[6] Figueiredo M, Gomes J, Gomes C, Lopes J. 2014. Augmented Reality Tools For Teaching And Learning. International Journal on Advances in Education Research. Vol 1.No 1.22-34
-
[7] Qetkeaw. M, 2012, Wireless Control Quadcopter With Stereo Camera and Self Balancing System, University Tun Hussein Onn, Malaysia
-
[8] Viet T.P, Seung Y.C. 2010. Interior Design in Augmented Reality Environment. International Journal of Computer Applications.Vol 5 No 5
-
[9] Bodin, L., Golden, B. M., Assad, A., and Ball, M., (1983) “Routing and Scheduling of Vehicles and Crews: The State of the Art.” Computers and Oprations Research, Vol. 11, No. 2, pp. 63-211.
-
[10] Eminugroho R., D. L. (2014) ‘Optimasi Sistem Pengangkutan Sampah di kota Yogyakarta dengan Model Vehicle Routing Problem Menggunakan Algoritma Sequential Insertion’, Jurnal Pendidikan Matematika FMIPA UNY, (September), pp. 1–10.
-
[11] A, M. Zidny. (2014) ‘Optimasi Rute Kendaraan Dengan Kapasitas Menggunakan Modifikasi Algoritma Artificial Bee Colony’, Skripsi, pp. 1–49.
-
[12] Meitasari Winardi Saputri, Wayan Firdaus Mahmudy, D. E. R. (2015) ‘Optimasi Vehicle Routing Problem With Time Window ( Vrptw ) Menggunakan Algoritma Genetika Pada Distribusi Barang’, Repository Jurnal Mahasiswa PTIIK Universitas Brawijaya, 5(12), pp. 1–10.
52
Discussion and feedback