Pengenalan Jenis Rambu Lalu Lintas menggunakan Metode YOLO V5
on
p-ISSN: 2301-5373
e-ISSN: 2654-5101
Jurnal Elektronik Ilmu Komputer Udayana
Volume 11, No 4. May 2023
Pengenalan Jenis Rambu Lalu Lintas menggunakan Metode YOLO V5
Anak Agung Gde Bagus Janapriyaa1
aProgram Studi Teknologi Informasi, Fakultas Teknik, Universitas Udayana Bali, Indonesia
Abstrak
Meningkatnya jumlah kendaraan bermotor secara signifikan, tidak dapat dipungkiri turut mempengaruhi meningkatnya jumlah kecelakaan lalu lintas. Tingginya angka kecelakaan ini dapat diminimalisir dengan meningkatkan kesadaran masyarakat, dimana salah satunya dengan mengedukasi masyarakat mengenai aturan berlalu lintas. Bentuk edukasi masyarakat mengenai aturan lintas dapat dilakukan dengan mengembangkan sistem berbasis kecerdasan buatan yang dapat mengidentifikasi jenis rambu lalu lintas. Metode kecerdasan buatan yang sering digunakan adalah metode deep learning CNN. Penelitian ini mengembangkan metode untuk melakukan deteksi jenis rambu lalu lintas menggunakan metode YOLO V5 yang merupakan salah satu pengembangan dari metode CNN. Data yang digunakan terdiri dari 96 label jenis rambu lalu lintas dengan jumlah seluruh data sebanyak 1100 citra. Alokasi data train yang digunakan sebanyak 990 citra (90%), sedangkan alokasi data validasi sebanyak 110 citra (10%). Nilai identifikasi model yang diperoleh diantaranya precision sebesar 0,923, recall sebesar 0,826, mAP50 sebesar 0,965, dan mAP50-95 sebesar 0,924.
Keywords: Deteksi Objek, Rambu Lalu Lintas, YOLO V5
Di era globalisasi yang menuntut kemudahan akses akan transportasi mengakibatkan permintaan jumlah kendaraan bermotor di dunia meningkat secara tajam. Di Indonesia sendiri peningkatan jumlah kendaraan bermotor terbilang cukup signifikan. Menurut data Badan Pusat Statistik pada tahun 2020, jumlah kendaraan bermotor di Indonesia telah mencapai 136juta kendaraan. Meningkatnya jumlah kendaraan bermotor secara signifikan, tidak dapat dipungkiri bahwa jumlah kecelakaan lalu lintas pun meningkat. Berdasarkan data yang dikeluarkan oleh WHO (World Health Organization), sebanyak 1,25 juta orang meninggal akibat kecelakaan lalu lintas yang melibatkan kendaraan bermotor. Direktorat Lalu Lintas (Ditlantas) Polda Metro Jaya menyatakan, rendahnya disiplin tertib dalam berkendara sebagai salah satu penyebab utama kecelakaan lalu lintas di jalan. Data BPS pada tahun 2019, angka kecelakaan menyentuh 116.411, korban meninggal sebanyak 25.671, korban luka berat sebanyak 12.475, dan korban luka ringan sebanyak 137.342. Tingginya angka kecelakaan ini dapat diminimalisir dengan meningkatkan kesadaran masyarakat, dimana salah satunya dengan mengedukasi masyarakat mengenai aturan berlalu lintas.
Beberapa metode machine learning konvensional sudah dikembangkan untuk pengenalan rambu lalu lintas. [1] menggunakan metode ekstraksi ciri Wavelet Haar dan metode klasifikasi yang berdasarkan jarak Euclidean. Penelitian ini hanya menggunakan data citra rambu lalu lintas larangan. Hasil pengujian menunjukkan tingkat akurasi sebesar 92%. Penelitian yang lain [2] mengkombinasikan metode ekstraksi fitur momen-warna dan metode klasifikasi k-Nearest Neighbor. Hasil pengujian menunjukkan tingkat akurasi 100% pada k =3, 86,6% pada k = 5, dan 86,6% pada k = 7. Metode machine learning konvensional lain yang dikembangkan pada pengenalan rambu lalu lintas adalah metode Decision Tree [3]. Penelitian ini menggunakan algoritma Local Binary Pattern sebagai metode ekstraksi ciri dan algoritma Decision Tree J48 sebagai metode klasifikasi. Hasil pengujian menunjukkan tingkat akurasi 87.5%.
Untuk saat ini, ada kecenderungan pengembangan metode deep learning Convolutional Neural Network (CNN) untuk pengenalan rambu lalu lintas dengan menggunakan jumlah dataset yang cukup
banyak dan kelas yang bervariasi. [4] menggunakan metode Circle Hough Transform untuk mendeteksi rambu dan metode CNN untuk pengenalan rambu. Hasil pengujian pada penelitian ini menunjukkan tingkat akurasi sebesar 61,3% untuk deteksi rambu dan 75% untuk pengenalan rambu. Penelitian [5] lebih berfokus pada penentuan kombinasi terbaik antara hyperparameter beserta arsitektur dalam pengenalan rambu lalu lintas. Eksperimen pada penelitian menunjukkan bahwa arsitektur terbaik adalah layer CNN yang tersusun dari convolutional layer, pooling layer menggunakan operasi maxpool dan fully connected layer menggunakan algoritma training Stochastic Gradient Descent (SGD) pada kombinasi hyperparameter learning rate 0,005 dan jumlah filter sebanyak 48. Pada penelitian ini digunakan 10 jenis kelas rambu lalu lintas yang terdiri dari 1750 data citra latih dan 300 data citra uji. Hasil pengujian menunjukkan sistem mengenali rambu lalu lintas dengan galat 0,107 dan akurasi 97,33%. Penelitian CNN yang lain dilakukan pada [6], yang menggunakan sebanyak 10 kelas rambu. dengan jumlah data sebanyak 2050 citra. Arsitektur CNN yang digunakan diantaranya konvolusi dengan ukuran 3x3 sebanyak tiga layer, lapisan penggabungan (Maxpool) berukuran 2x2 sebanyak tiga layer, dan satu fully-connected layer dengan fungsi aktivasi Softmax. Tiap lapisan konvolusi menggunakan filter sejumlah 32. Jumlah epoch yang digunakan sebanyak 20 dan nilai learning rate 0,005. Hasil pengujian menunjukkan nilai akurasi mencapai 99,67%.
Pada penelitian ini, penulis menggunakan pengembangan dari arsitektur CNN yaitu model YOLO V5, dengan jumlah kelas untuk jenis rambu lalu lintas yang digunakan dalah 96 kelas, jumlah kelas yang besar yang membedakan penelitian ini dengan penelitian sebelumnya. Dataset yang digunakan sebanyak 1100 citra, dengan alokasi data training yang digunakan sebanyak 990 citra (90%), sedangkan alokasi data validasi/testing sebanyak 110 citra (10%).
Data yang digunakan berupa citra rambu lalu lintas dengan format JPG. Resolusi citra diseragamkan menjadi ukuran 1077 x 1077 piksel. Dataset terklasifikasi menjadi 96 label jenis rambu lalu lintas, yang terdiri dari 46 label rambu peringatan, 11 label rambu petunjuk, 12 label rambu perintah, dan 27 label rambu larangan. Total data citra keseluruhan sebanyak 1100 citra, yang dibagi menjadi 990 citra (90%) data train dan 110 citra (10%) data validasi atau test. Contoh citra rambu lalu lintas bisa dilihat pada Tabel 1.
Tabel 1. Spesifikasi Dataset

-
2.2 Tahapan Penelitian
Tahapan penelitian meliputi proses akuisisi citra hingga pengujian perfoma model pengenalan. Alur dari tiap tahapan dapat dilihat pada Gambar 1.
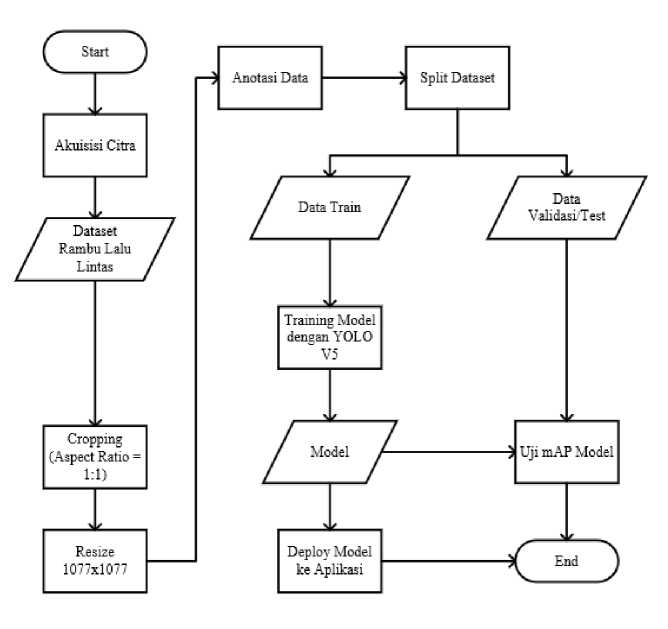
Gambar 1. Tahapan Penelitian
Proses akuisisi citra dilakukan dengan melakukan screen capture pada aplikasi Google Street View. Lokasi yang digunakan pada aplikasi berada di beberapa jalan yang ada di Bali. Cropping citra dilakukan secara manual dengan tool bawaan pada Windows 10. Proses resizing dilakukan untuk menyeragamkan ukuran citra. Dimensi citra hasil proses resizing berukuran 1077 x 1077. Resizing dilakukan untuk meningkatkan performa training model. Anotasi data adalah proses untuk menandai region piksel pada suatu citra dengan label. Proses anotasi data dilakukan dengan menggunakan tool MakeSense pada data citra training dan citra testing.
YOLO singkatan dari "You Only Look Once" adalah metode pendeteksian objek yang membagi gambar menjadi sistem grid. Setiap sel dalam grid bertugas mendeteksi objek yang ada. YOLO V5 dirilis pada 18 Mei 2020 oleh Glenn Jocher menggunakan PyTorch Framework [7].
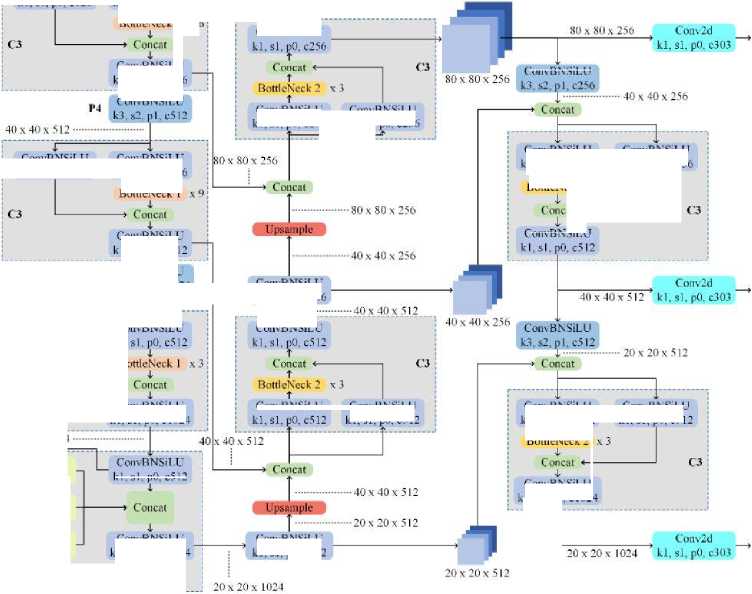
Proses training model dilakukan dengan menggunakan arsitektur YOLO V5. Arsitektur model yang digunakan dapat dilihat pada Gambar 2. Terdapat 4 bagian utama pada model YOLO V5 yaitu Input, Backbone, Neck, dan Head/Prediction.
Parameter k merupakan ukuran kernel, s merupakan stride, p merupakan jumlah padding, dan c merupakan besar channel out. Resize citra dilakukan di awal (bagian Input) untuk mengubah citra menjadi ukuran 640 x 640 (RGB). Arsitektur YOLO V5 memiliki 3 output yang dirancang untuk melakukan deteksi objek pada skala berbeda (objek ukuran besar, sedang, dan kecil).

ConvBNSiLU
kLsl.
A c64
BottleNeck l χ 3
O
Concat
ConvBNSiLU kl. si, pθ, c64
ConvBNSiLU k6, s2,j∣2, c64 ConvBNSiLU W, s2, pl. c 128
BoltIeXeckl
ConvBNSiI-U
ConvBNSiLU L I si. pl c
1

1
P3
80 x 80 x 256
BottleNeck I x 6
ConvBNSiLU
CoiivBNSiLL kl. slt pθ. cl 28
CotwHXISiLU kLsLpO,cl28
UonvIiNSiLU kl,s∣, Jθ,cl28 ConvBNSiLU k3. s2, pl. c256
PS
CoiivBNSiLU kLsl.pO, c5i2
UonvRNSiLll
ConvBNSiT-U
LoiivBN SiLU
klτsl. pθ1c512
ConvBNStLL CoiivBNSiLL kl, si. pθ. c5U
20.x 20 x 1024
SPFF
ConvBNSiLL kl.81.p0,cl024
20 x 20 x 1024 ........t------ MaxPooI 2d
k5,sl,p2
I MaxPooOd k5, si. p2
MaxPooI 2d k5,sl,p2
ConvBNSiLLJ k∣.sLpO.c256
CoiivBNSiLL kl, 81. pi), c256
ConvBNSil U
ConvBNSiLL k≡ . si pP,c256
BoltleNeck 1
ConvBNSiLL si. pθ. c51
CoiivBNSiLL k3: s2. pl. cl024
ConvBNSiLL
ConvBNSiLL kL⅛LpO.clO24
ConvBNSiLU ConvBNSiLU kl, si, pθ, c256 kl, si, pθt c256
ConvBNSiLU kLsLpO.c2>6
ConvBNSiLU kl, sl.pθ,c256
BollleNeck 2 x3
ConvBNSiIL kl, sL pθ, c256
ConvBNSiLL
CoiivBNSlLU klfsl,pθ,c512
ConvBNSiLU kLsLμO. c512
CoiivBNSiLLi kl,sl,pθtc51
BottleNeck 2
ConvBNSiLU d. si. pθ, clO24
Gambar 2. Arsitektur YOLO V5 Deteksi Jenis Rambu Lalu Lintas
Input merupakan lapisan (layer) pertama pada arsitektur YOLO V5. Lapisan ini menghubungkan citra dengan arsitektur YOLO V5. Backbone merupakan bagian arsitektur YOLO V5 setelah citra di-input. Backbone berfungsi untuk melakukan ekstraksi fitur citra. Neck merupakan bagian arsitektur YOLO V5 setelah proses ekstraksi fitur pada Backbone. Neck berfungsi untuk melakukan feature aggregation, yaitu menggabungkan fitur gambar untuk diteruskan untuk proses prediksi pada Head. Head/Prediction merupakan bagian akhir arsitektur YOLO V5. Head berfungsi untuk melakukan klasifikasi dan deteksi bounding box objek. YOLO V5 menggunakan Generalized Intersection over Union (GIOU) sebagai fungsi loss dari bounding box. YOLO V5 memiliki 3 output tensor yang selanjutnya dilakukan flatten dan reshape untuk dilakukan klasifikasi dan regresi.
Salah satu studi deteksi objek YOLO V5 sebelumnya [8] menggunakan nilai hyper-parameter learning rate 0,01, sedangkan untuk epoch 300 disarankan dalam dokumentasi YOLO V5 [7]. Hal ini menjadi acuan untuk kombinasi hyper-parameter yang digunakan pada penelitian. Nilai hyperparameter epoch yang digunakan sebanyak 300, batch size sebesar 16, dan learning rate sebesar 0,01. Pre-trained weights digunakan sebagai initial weight pada YOLO V5.
Metriks evaluasi yang digunakan adalah Precision, Recall, F1-Score, mAP50, dan mAP50-95. Mean Average Precision (mAP) merupakan metriks evaluasi dalam deteksi objek. Metode YOLO V5 menggunakan mAP50 dan mAP50-95 secara default. mAP merupakan metriks evaluasi dalam deteksi objek. Pengukuran metriks mAP melibatkan penggunaan matriks confusion dalam melakukan penghitungan metriks Precision dan Recall dari tiap label pada citra [9]. Metriks mAP50 menggunakan nilai ambang batas IoU sebesar 0,5. Metriks mAP50-95 merupakan rata-rata mAP dengan 10 nilai ambang batas IoU yang berbeda yaitu 0,5, 0,55, 0,60, 0,65, 0,70, 0,75, 0,80, 0,85, 0,90, dan 0,95 [7].
Matriks confusion pada deteksi objek didasarkan pada nila IoU untuk menghitung nilai True Positive (TP), False Positive (FP), dan False Negative (FN). True Negative (TN) tidak digunakan karena tidak berpengaruh terhadap performa dari metode pendeteksian objek. Penjelasan dari setiap nilai metriks pada matriks confusion bisa dilihat pada Tabel 2.
Tabel 2. Matriks Confusion pada Deteksi Objek
|
Confusion Matrix |
Penjelasan |
|
TP (True Positive) |
IoU ≥ α (thresold IoU). |
|
FP (False Positive) |
IoU < α (thresold IoU). |
|
TN (True Negative) |
Seluruh bagian citra yang tidak terdapat objek dan tidak dideteksi sebagai objek. |
|
FN (False Negative) |
Ground truth yang sama sekali tidak terdeteksi. |
Anotasi data adalah proses untuk menandai region piksel pada suatu citra dengan label. Tool MakeSense digunakan dalam anotasi data pada laporan ini. Label anotasi berupa nama jenis rambu lalu lintas. Export dilakukan setelah proses anotasi pada seluruh citra selesai, sehingga diperoleh kumpulan file .txt dari tiap citra yang berisi representasi hasil anotasi citra seperti id label rambu lalu lintas dan area bounding box objek. Gambar 3 menampilkan contoh hasil anotasi data. Setiap data citra yang digunakan ditandai bounding box pada objek rambu lalu lintas beserta nama label rambu.
Proses training model dilakukan pada data training. Metriks evaluasi seperti Precision, Recall, dan mAP diperoleh melalui proses validasi pada model yang dihasilkan.

Gambar 3. Contoh Hasil Anotasi Data
Gambar 3 menyajikan sampel data citra yang dilakukan anotasi. Setiap data citra yang digunakan ditandai bounding box pada objek rambu lalu lintas beserta nama label rambu.
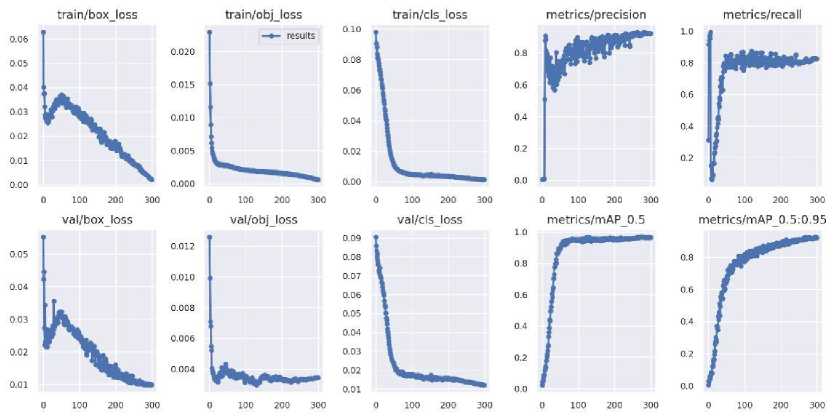
Gambar 4. Grafik Loss dan Metriks Training dan Validasi Model
Grafik loss (box loss, object loss, dan class loss) dan grafik metrik (precision, recall, mAP@0.5 atau mAP50, dan mAP@0.5:0.95 atau mAP50-95) selama proses training dan validasi ditunjukkan pada Gambar 4. Grafik menunjukkan penurunan yang stabil pada tingkat loss serta kenaikan nilai yang stabil pada grafik metrik selama 300 epoch. Nilai metrik keseluruhan (96 label rambu lalu lintas) diantaranya yaitu precision sebesar 0,923, recall sebesar 0,826, mAP50 sebesar 0,965, dan mAP50-95 sebesar 0,924.
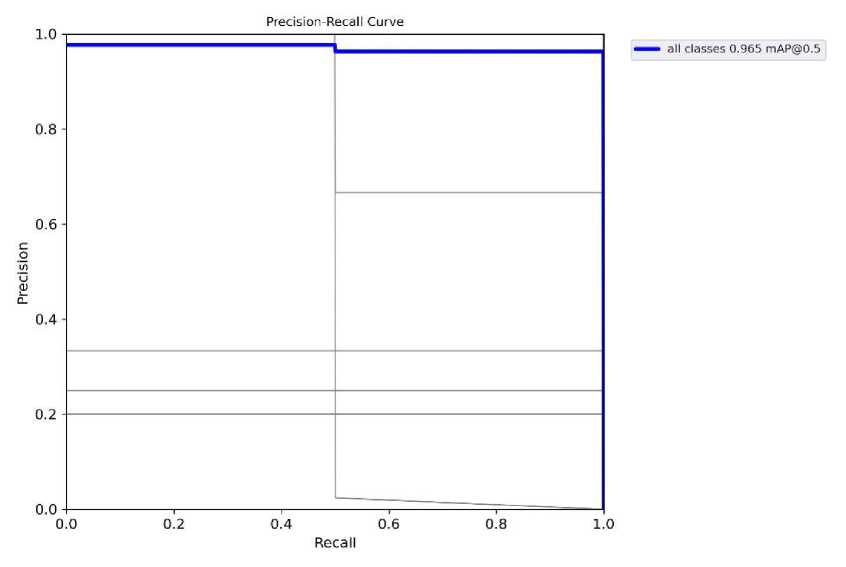
Gambar 5. Precision-Recall Curve dari Training Model
Gambar 5 merupakan grafik Precision-Recall Curve secara keseluruhan (pada mAP@0.5 atau mAP50). Precision-Recall Curve merupakan plot precision dengan recall yang menunjukkan trade-off
antara dua metrik tersebut untuk berbagai nilai confidence pada hasil prediksi model [10]. mAP dihitung berdasarkan luas AUC (Area Under Curve) yaitu area di bawah kurva precision-recall. Besar mAP berada pada kisaran 0 sampai 1. Grafik hasil plot label pada Gambar 5 sebagian besar saling berimpitan mendekati nilai 1. Besar mAP50 yang diperoleh pada keseluruhan label sebesar 0.965.
Uji deteksi dilakukan dengan melakukan pengujian mAP model. Pengujian mAP model pengenalan jenis rambu lalu lintas dilakukan terhadap seluruh citra test dari 96 label rambu lalu lintas (total sebanyak 110 citra). Hasil pengujian terhadap model YOLO V5 menghasilkan nilai metriks evaluasi diantaranya yaitu nilai Precision sebesar 0,923, Recall sebesar 0,826, mAP50 sebesar 0,965, dan mAP50-95 sebesar 0,924.
Pengenalan jenis rambu lalu lintas dengan 96 label berhasil dilakukan dengan menggunakan Model YOLO V5. Hasil pengujian menunjukkan nilai metriks evaluasi yang cukup baik yaitu nilai Precision sebesar 0,923, Recall sebesar 0,826, mAP50 sebesar 0,965, dan mAP50-95 sebesar 0,924. Hasil ini masih bisa ditingkatkan dengan menambahkan lebih banyak data training dan data testing untuk setiap label. Penambahan data bisa dilakukan dengan menambahkan proses augmentasi citra pada tahap preprocessing.
Daftar Pustaka
-
[1] V. Abdi Gunawan, I. Imelda Fitriani, and L. Sandy Ade Putra, “Klasifikasi Rambu Lalu Lintas
Menggunakan Ekstraksi Ciri Wavelet Dan Jarak Euclidean,” Jurnal ELTIKOM, vol. 3, no. 1, pp. 26–35, 2019, doi: 10.31961/eltikom.v3i1.105.
-
[2] R. E. F. Rizarta and D. Avianto, “Pengenalan Citra Rambu Lalu Lintas Menggunakan Ekstraksi
Fitur Momenwarna Dan K-Nearest Neighbor,” Computatio: Journal of Computer Science and Information Systems, vol. 3, no. 1, pp. 39–55, 2019, doi: 10.24912/computatio.v3i1.4272.
-
[3] K. Tanuwidjaya and L. Hakim, “Klasifikasi Rambu Lalu Lintas Menggunakan Decision Tree J48
dan Local Binary Pattern,” JITTER-Jurnal Ilmiah Teknologi dan Komputer, vol. 3, no. 1, pp. 1– 7, 2022.
-
[4] R. T. Nursetyawan and F. Utaminingrum, “Pengembangan Sistem Rekognisi Rambu
Kecepataan Menggunakan Circle Hough Transform dan Convolutional Neural Network Berbasis Raspberry Pi,” Jurnal Pengembangan Teknologi Informasi dan Ilmu Komputer, vol. 4, no. 11, pp. 4012–4018, 2020.
-
[5] M. Akbar, “Pengenalan rambu lalu lintas menggunakan convolutional neural networks,” Jurnal
Teknologi dan Sistem Komputer, vol. 9, no. 2, pp. 120–125, 2021, doi:
10.14710/jtsiskom.2021.13959.
-
[6] M. Akbar, A. S. Purnomo, and S. Supatman, “Multi-Scale Convolutional Networks untuk
Pengenalan Rambu Lalu Lintas di Indonesia,” Jurnal Sisfokom (Sistem Informasi dan Komputer), vol. 11, no. 3, pp. 310–315, 2022, doi: 10.32736/sisfokom.v11i3.1452.
-
[7] G. Jocher, “YOLO V5 by Ultralytics,” GitHub, 2020. https://github.com/ultralytics/yolov5
(accessed Feb. 24, 2023).
-
[8] Z. Wang, Y. Wu, L. Yang, A. Thirunavukarasu, C. Evison, and Y. Zhao, “Fast Personal Protective
Equipment Detection for Real Construction Sites using Deep Learning Approaches,” Sensors, vol. 21, no. 10, pp. 1–22, 2021, doi: 10.3390/s21103478.
-
[9] Adrian Rosebrock, Deep Learning for Computer Vision with Python!, 1st ed. PyImageSearch,
2017.
-
[10] H. R. Sofaer, J. A. Hoeting, and C. S. Jarnevich, “The Area Under the Precision-Recall Curve as a Performance Metric for Rare Binary Events,” Methods in Ecology and Evolution, vol. 10, no. 4, pp. 565–577, 2019, doi: 10.1111/2041-210X.13140.
This page is intentionally left blank.
1018
Discussion and feedback