Trafic Signs Detection Based On Saliency Map Using Canny Edge
on
Journal of Electrical, Electronics and Informatics, Vol. 2 No. 1, February 2018
1
Trafic Signs Detection Based On Saliency Map Using Canny Edge
Putri Alit Widyastuti Santiary1, I Made Oka Widyantara2, Rukmi Sari Hartati3
-
1,2,3Master of Information Systems and Computer, Electrical Engineering Graduate Program Udayana University
Denpasar, Bali, Indonesia
Abstract This paper proposed Canny edge detection to detected saliency map on traffic sign. The edge detection functions by identifying the bounds from an object on an image. The edge of an image is an area that has a strong intensity of light.The pixel intensity of an image changes from low to high values or otherwise. Detecting the edge of an image significantly will decrease the amount of data and filters insignificant information by not deleting necessary structure from the image. The image used for this paper is a digital capture of a traffic sign with a background. The result of this study shows that Canny edge detection creates saliency map from the traffic sign and separates the road sign from the background. The image result tested by calculating the saliency distance between a tested image and trained image using normalized Euclidean distance. The value of normalized Euclidean distance is set between 0 to 2. The testing process is done by calculating the nearest distance between the tested vector features and trained vector features. From the examination as a whole, it can be concluded that road sign detection using saliency map model can be built by Canny edge detection. From the whole system examination, it resulted a accuracy value of 0,65. This value shows that the data was correctly classified by 65%. The precision value has an outcome of 0,64, shows that the exact result of the classification is 64%. The recall value has an outcome of 0,94. This value shows that the success rate of recognizing a data from the whole data is 94%.
Index Terms— traffic signs, saliency map, Canny edge detection, normalized Euclidean distance.
II. INTRODUCTION
The automatic traffic signs detection is an interesting topic on intelligent transportation systems and has been implemented on various applications such as driving safety and automatic vehicle guidance. Traffic signs can be in the form of symbols, letters, numbers, sentences or combinations and serves as warning, prohibition, command or directions for road users [9]. The problem of traffic sign recognition has some beneficial characteristics such as unique design of traffic sign board, which means the sign shape variations are small, and significantly color contrast against the environment [18].
Traffic sign detection by real time and accurate has become an attention in Computer vision practices. Computer vision aims to computerized human vision or create digital images from original images (based on human vision). The aim of traffic lights detection system is to guide and give directions to drivers while driving, thus increasing the road safeness. This system can be classified into two parts, which are a system that provides information to
drivers and system that acts all at once for the vehicle. [8].
Traffic signs are designed to be salient from the objects around them or background. The computation methods to automatically detects those traffic signs in the image remains significant. Humans can identify salient areas in their visual fields with surprising speed and accuracy before performing actual recognition. Computationally detecting such salient image regions remains a significant goal, as it allows preferential allocation of computational resources in subsequent image analysis and synthesis [3]. The objective is to separates the desired objects from the background around the image. This study proposed Canny edge detection to obtains saliency map model of traffic signs detection.
-
II . CANNY EDGE DETECTION
The objective of edge detection is to identify the boundaries of an object inside image. The edges of an object are areas that has a strong light intensity. The pixel intensity of an object changes from low to high value or vice versa.
Detecting the edges of an object significantly reduce the amount of data and filter out useless information without loss important of structure of the image. One of the modern edge detection algorithms is edge detection using the Canny method.
Canny edge detection detects the actual edges with minimum error rate. Canny operators are designed to produce optimal edge image output. The Canny edge detection algorithm as follows [15]:
1. Application of Gaussian filter to reduce noise.
This process produces an image that looks a bit blurry. It aims to get the edge of the real object. If not applied, the fine lines will also be detected as edges. Here is one example of a Gaussian filter with σ = 1.4 below.
|
2 |
4 |
5 |
4 |
2 | |
|
4 |
9 |
12 |
9 |
4 | |
|
— |
5 |
12 |
15 |
12 |
5 |
|
115 |
4 |
9 |
12 |
9 |
4 |
|
L2 |
4 |
5 |
4 |
2-∣ |
2. Edges value detection.
Finds the edge value by connecting the image gradient using a pair of 3x3 convolution matrices Gx and Gy below. Gx predicts the gradient value for x direction (column) and the other predicts the gradient value for the y direction (row).
Gy
The edge gradient G calculated by equation (1):
(1)
3. Edges direction detection.
Finds the edge direction θ using equation (2):
In above matric, (a) pixel has four possible directions when looks into surrounding pixels. The directions are as follow: 0o horizontal direction, 45o positive diagonal direction, 90o vertical direction, and 135o negative diagonal direction. Hence, the edge should point into the four directions, depends on which direction is closest. For example, if the angle is 3o, its became 0o. The next step, divide into four colors so that the lines with different directions will have different colors. The divisions as follow: (0o - 22.5o) and (157,5o - 180o) is yellow, (22.5o -67.5o) is green, and (67,5o - 157,5o) is red.
-
5. Non-maximum suppression process.
Non-maximum suppression is used to trace edge within edge direction and filter out pixels unconsidered as edge. This will show a fine line on the output image.
-
6. Binary with applying two thresholds.
-
III. RESEARCH METHODE
The dataset used in this study are digital images of traffic signs from image dataset at URL http://aganemon.tsc.uah.es/Investigacion/ gram/traffic_signs.html [1]. Dataset contains of 325 images and processed using Java programming language. Computer program runs on portable computer with dual-core T2080 processor 1.73 GHz 1GB memory. In Figure 1 below shows process flow diagram.
-
A. Input Image
The input- image has some characteristics that came from shooting conditions. Distance shooting made differences of close or long-distance nput-image. Lighting condition made input-image bright or dark. Shooting orientation showed that images are shoot at different orientations. Not all images at perpendicular position, there are some images shoot at a somewhat skewed position.
(2)
4. Edges direction connection.
The directions of the edges are connected in a direction that can be traced according to the original image. The following example uses a 5x5 pixel image.
(2.11)
|
x |
x |
x |
x |
x |
|
x |
x |
x |
x |
x |
|
x |
x |
a |
x |
x |
|
x |
x |
x |
x |
x |
|
x |
x |
x |
x |
x |
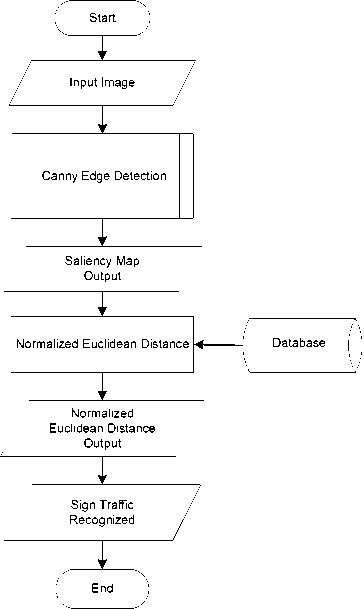
Figure 1. Proces Flow Diagram
-
B. Canny Edge Detection
Edge detection of traffic signs used Canny procedure. The edge of an object within image is an area that has a strong light intensity. Intensity of pixel changes from low to high value or vice versa. First, the original image in the r-g-b color space is converted into a grayscale image I with equation (3) [16].
Second, the grayscale image is filtered by applying a Gaussian filter with σ = 1.4 as follows:
And then, the edge value is obtained by applying two matrices Gx and Gy as below:
Gx
I
+1 0
-1
+2 +1
00
-2 +1
Gy
-
C. Threshold
Binary image is obtained by applying a threshold. Binary process aims to adjusts intensity of gray level image. It changes image initially a 255-gray level (8 bit) into binary (black and white). Within threshold results become clear.
One thing to consider in threshold process is to chooses a threshold value. Pixels value below threshold value will be set as black otherwise as white. The threshold value T is calculated by using equation (4) [15].
ψ _ f maks+ f min
2
(4)
Images result of binary process is final result of saliency map.
-
D. Normalized Euclidean distance
Normalized Euclidean distance from cropped test-image results of saliency map compared with train-image dataset. The normalized Euclidean distance of two vector feature of u and v is shown by equation (5) [13].
d(u,v) = (∑i(ui - vi)2)v2
(5) with,
“i v
i Hull , i HvH
(6)
HvH = [∑iVi2]v2
(7) where:
d(u, v) = Normalized Euclidean distance u, v = vector feature.
The smaller of score d(u, v), the more similar of two feature vectors or vice versa. Characteristic of normalized Euclidean distance is that the result within range of 0.0 ≤ d(u, v) ≤ 2.0.
Output image of saliency map is tested by calculates the saliency distance between test-image and train-image in the database. The test results are classified into two types, namely signs and not-signs.
-
IV. RESULTS AND DISCUSSION
The saliency map in this study has been tested from collection of digital images on dataset. The original image can be seen in Figure 2 (a) through (h) in which have differences type of test data.


(b)


(f)


(h)
Figure 2. The original images (a) Data 1, (b) Data 2, (c) Data 3, (d) Data 4, (e)
Data 5, (f) Data 6, (g) Data 7, (h) Data 8
Figure remark: Data 1 and 2 are priority signs, data 3 and 4 are prohibition signs, data 5 is a danger sign, data 6 is warning and information sign, data 7 is end of prohibition sign and data 8 is obligation sign.
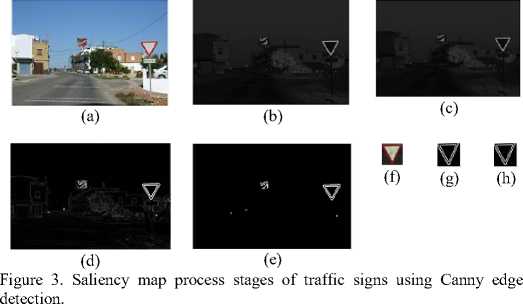
Process stages of obtaining a saliency map for traffic signs using Canny edge detection for data 1 is shown by figure (3).
-
1) The Original Images: Traffic signs image with
background in r-g-b color space. This is used as input data on the system. The original image is shown in Figure 3 (a).
-
2) Grayscale: Converts the r-g-b original images into one
grayscale image. Each intensity values of color channel are summed up into a grayscale image I. And then obtains the absolute averaged value of I by eliminates decimal values. Grayscale conversion produces a new different gray level image. The image has various level of black to white. Grayscale conversion results are shown in Figure 3 (b).
-
3) Gaussian filter: Applied a Gaussian filter to noise reduction. The grayscale image filtered with a Gaussian filter with σ = 1.4. This process produces a bit blurry image. The Gaussian filter results are shown in Figure 3 (c).
-
4) Canny Edge Detection: Canny edge detection finds the edge value by connecting image gradient using a 3x3 convolution matrix pair. The result of Canny edge detection is shown in Figure 3 (d).
-
5) Binaryization: Binary images obtained by applying two thresholds. This is final stage to gets the saliency map of traffic signs image. The result of the binary process is shown in Fig. 3 (e).
-
6) Cropping: Cropping process for original image and
saliency map image result. Cropping separates image object from its background. Cropped results used to calculate the normalized Euclidean distance between the test-data and the train-data. Figures 3 (f), 3 (g), and 3 (h). show cropped original image, test-data and comparison data. Cropped test-data results of the saliency map process. Comparative data are train-data, in which results of a saliency map processes that has been stored in database.
-
7) Normalized Euclidean Distance: For assessment of result normalized Euclidean distance of cropped saliency map image results (test-data matrix) compared with training data (train-data matrix) using equation (5). Test-data matrix of Data 1 can be seen in figure 4 and figure 5 for train-data matrix.
::::-::.-..--..■■.........■............j
A1A1A1A1A1X XA1O1J1I11, l,∣tltA1 -J1O1O1J1 Ri14J1XA1O1O1O1AlA1O1C1C1A1A1O1O1J
A A A A A A A A C-. C1X A A C C111XA414 .A I, C, C1C1A A C. C1C1A A C C1C1A A C-. C1J
Xl Ka1UMCf1S41Sl1aJ1K1CI..
ihm,;
2W.JJI,XSAX.taJ1 NA IAi UX IJl1Ill ICa lit U
KiKi!
-
• ICZ ZW ICX M1HStWI1Zi. S. J1 >, 4.t.C A > C. C. !.J1A1J1I1I1X XC CA ! « NMJJ.tJ.UJ, ZV4I1C i s i v »i, iχ ∣af ,3χ icmjv M1AA41 «,a xmc-aaj,ua IUlUjsalHj v iq,h«j«:Au
* 1 SJlUil κ1wtιrta'jχ uc.c.Ajjtctctu Ae,o,θAxιtotθA ⅞ i∙aχw∣t∣afXR∣so13WM1A⅛tc XM-MK UC JMU1HS ISC UtC1J1J J1C1J1AM JCJJ M1M X “ AJ Na X,t Mi1IlJ1J1X JC H n J1 K1 IH. IH. U1ISa1HlHJtCA1J1J1J1JA MJtCA1J1CJJ1I, 'Ill1ISM4MMSC1XtVAXC XXXlJa IH IllAi1HiIJa K 1 J. X1X1J1Ia M J CJ1J1J1I1C1J K IlXUl1M1 Ill1Ha IN Xl1IC1C 4 XAA W. Γ4.2ll, SJ1Ul I5S,U1AC1CA, SJ.C. JA1AC-JJJ AC.a. IX 235, ISI,«Alt ISAJJ1JJtS1AO 1 A X X X VJlJ1UA IS, Hi UI1SjJAIC1C1X XC C C 1. IJJJ1SJ Ui, JIa1Ia1 IZ1Jil TjA I1X1A X
J J J1J1J11 ta1t4a. ZU1 aJ IX1I1MaIIJ1C1C1J J C C.l t, JJJ1 UlX1HMWtV1 ItC1ISMS1 IC1C1A J1 C.C X i AAUtltSC Si U- Ji IaA1HXrt1XC1C1X JCiiJ Xf1UIZ Ila1⅛ UlUAU 4 J J XC1C1X S A A J1 J1A J1 JJ1M1 HS1IZI1JIA4S JW14S1I1C1J J C. C. C A J1IA t JA IS! IW4alZIt. I5β1ll1l, JJ1CtCAtC .. - , .∙ ...111 ,
SJA1XAJJ1 J1J1aMaiIM IC1IriISJ1K1I1A S1C111J t1 N1IKlK1aI1aItIS41UR IItIJ1C1C1M1 J1I1I t a AAAAAA41IMX1UA IClaMSMaMJ JJCi M1aSHJlF IMaXHHaJ C J J Ji1C1X 1 4 11- 4J14, UA1AtC-C1S1 W1ZCAlJtt IaS1IS1 .t∏ 11.C1C101ASOtIMIS! aA IJl1NS1IZC14 AA4tI1A, S1 SJ1J1I II1Mj1IA C-A XXf1SMN1IJX-HXUl1F J J A», I la1 ISJ1Ut1 H IM1JM1N1X X X C i a a A UM
a a M, 1 IC. HSJA1 a1 U1IS1NS1S41 WA4S IM F. IX l-'MH.M. I* NMa 1' U1I. JJ1 H, XU1U1U. IlMA1Ilj1U ∣Aa Al Ha1XiiS UMXI1UMCXa IlMMJa1Ua S1U J' 1 i I W1JSLtJ1 Ia1IS1W1IJ1IAH UkStX1JX HC1XJ1 IJS.IMTA15Iie.il, IAICtZJS 'S,U,11,11 a N1Jl1 IC-, lSς la JJ1H1IIS1J1IS, Jl Ja1 F,l⅛ JSC- XC JX W, Ii A M Uj ISa1H1S1 U1S It1Jl1JX
S1 3,JlS1 M,∣l.U.a.S.ZMJ IJ1W1ISMSt.J4C-I1aMWAr aA X.tS.ll.lJ. 1" Sl1S1II1 JJ1MMJ I.’ I1JJ
I Ja1JMAXU I Xi S a a IJ1Ii U1Ua1NJM 11H IMUi ISC H U IC1JlU U1U K l>,Ja M1H1JC UIS1Ja
1 F1JSJJ1J1 S1I1J1J1 5. Z a.lS. II1II F.SS UJ-UiIJt1I-4I1HZ M IJ1J1U1WtS1C1S1IZlAC1SI1IMMAJa1U .■•-■. . . u» .u ιcx∣∙ :« :. :; i t: H ., ,. .- - .
Figure 4. Test-data matrix.
TABLE 1
Normalized Euclidean Distance Result
|
No |
Data |
Euclidean distance |
Recognized as |
|
1 |
Data 1 |
0,0819 |
Sign |
|
2 |
Data 2 |
0,0326 |
Sign |
|
3 |
Data 3 |
0,0424 |
Sign |
|
4 |
Data 4 |
0,0913 |
Sign |
|
5 |
Data 5 |
0,0377 |
Sign |
|
6 |
Data 6 |
0,1880 |
Sign |
|
7 |
Data 7 |
0,1451 |
Sign |
|
8 |
Data 8 |
0,3848 |
Sign |
rcxΛ λCΛ.r>Λ< J» :«.:r a.uuιj
H.C.J J 4,4 C X J ιi IIkIM IC-4' ^I 1 Q1UA1S1CtC1CAAJ1IS1JSJ1 Iflft II1UlIS ,K1J1IXCJ1J1I1 M1ICiJK1IALlW1ISk .t’»,t»,sa1c1j.i>•’* 2’ ιr.w.fiπι∣ 5illll, n 4 ,C C S, X1IM lit, 'S IJl1MX IS
rlιιa1a1u1A1∞1iH,¾ w.bs.hm». ∞ji 41s,τ,i4 Ia1Mkcskc1Mkiw r ικl3iut,>2 t.π.s.L, n • c ir.xs t’, tjsjs∙.υ>:« :r i ^tU,>S Ii U1M1X1IMU1M1IM, Il It XU Jlt □ ,∏.1 ld,J.IJ1KI', ST1HllSt.M1JIM’S, S1MJ Ii,-, x n ji i.«,«,UilIM1IM j > IM S- u: I iJj.-. -::.::.u. ir.»st,u. Siw ihj« ; J1XXl is u i!.SilXuujiajiiKiU iK; jsa.-a -, U.K.».::, 11, MJ.isi s»», ir.ucm i UJX1>ι1M,a,J>1z z.u,xjj,Mji4jM m,m
5, J1 U. IM1IMAl1 IS1MS1IK1Il1CA SA1C1JA X4 J,t A 3 1.«.«A. S CAX WIK TM1Ml1».JJJ1O λ λ λ < IU1 IMlUaU?.XiM 1 C1X i X JJA X IJ 4 X X 4 4 4.1 * U1,X5. UX ISk IK1XCk -I- XC1C
5, Λfl⅛ If1UI1III1 M,ai IF1M1 IAA», J1JA LI1J1OA XJ1 LC1A M1JIS1JII1M1 lll.a'. IX1A 1,AC1C ∖X,XX K1IU1Ill1 S UllM UikC1C1XSJ1CJJ1 XCJ JjXC 'JXXSkUl M1XIl1 IiXJi JJ1X XC
SAflA ITOtIUtIMISkSlin,9β,I S J,C.C.S1 S1C1O1O1I, I 4.4. J1SlISl II’,J’, 150.31, ’J A * l,*.S.i
J J • » JICJU,XJM ICOJM1IttJl X1C1Cj XC1CJj1LCtC C1XlJSiXS1Al SC XlS I-XlSJJ1J 1 4„
S, S1Afll t,z<.tsi Ml IAIIfl1MllILTtAS1CAA1A 14.1 J t, 1»4 Hllflt A MiLlJO1T1Zi AC1C1L t
J1 J1 J1 X X⅛∏1u∙, Xi1-X1 IM1XS l∙i⅛C,CΛ X4.C I: X ’ « A iκ,M5, IX1MJlC WJ m IC1CA XC1I
t j.tt.tt. 1». u,», zo.r. u, n it. ? is, i IM1ICk Ill1IlS1 Iil Iil US ISC1I-J IM IS Itt1XIXIX1Ill ZlkJU1XMl Wl1 Iflt I SJX1-C1JI) JLS1Il1JXa M 4X44 44 ' ∙.!∙t ∏5.1∏, U1.3M.ΣUIFAC 144.1. MXlM1HXJiJ jl⅛JX 111 Itk IM1IL
Figure 5. Train-data matrix.
Table 1 shows results of normalized Euclidean distance of all data. The normalized Euclidean distance values in range of 0.0 and 2.0. It shows both data have slight different, but still recognized as a sign. From the whole system examination, it resulted a accuracy value of 0,65. This value shows that the data was correctly classified by 65%. The precision value has an outcome of 0,64, shows that the exact result of the classification is 64%. The recall value has an outcome of 0,94. This value shows that the success rate of recognizing a data from the whole data is 94%.
-
V. CONCLUSSION
This study has demonstrated that the application of Canny edge detection performs clear of edge detection results. The saliency map model of traffic signs detection has well generated with Canny edge detection and produce great sign identification. From the whole system examination, it resulted a accuracy value of 0,65. This value shows that the data was correctly classified by 65%. The precision value has an outcome of 0,64, shows that the exact result of the classification is 64%. The recall value has an outcome of
0,94. This value shows that the success rate of recognizing a data from the whole data is 94%.
REFERENCES
-
[1] Bascón, Saturnino Maldonado. 2007. Road-Sign Detection and Recognition Based on Support Vector Machines. IEEE Transactions On Intelligent Transportation Systems, Vol. 8, No. 2, June 2007.
-
[2] Borji, Ali dan Laurent Itti. 2013. State-of-the-Art in Visual Attention Modeling. IEEE Transactions On Pattern Analysis And Machine Intelligence, Vol. 35, No. 1, January 2013.
-
[3] Gao, Shangbing dan Yunyang Yan. 2012. Salieny and Active Contour based Traffic Sign Detection. ISSN 1746-7659, England, UK Journal of Information and Computing Science Vol. 7, No. 3, 2012, pp. 235240.
-
[4] Hechri, Ahmed dan Abdellatif Mtibaa. 2011. Lanes and Road Signs Recognition for Driver Assistance System. IJCSI International Journal of Computer Science Issues, Vol. 8, Issue 6, No 1, November 2011.
-
[5] Itti, L., Koch, C. dan Niebur, E. 1998. A Model Of Saliency-based Visual Attention For Rapid Scene Analysis. IEEE Transactions On Pattern Analysis And Machine Intelligence Volume 20, Issue 11, Nov 1998.
-
[6] Itti, L. 2004. Automatic Visual Salience. Scholarpedia, 2(9):3327, 2007.
-
[7] Jayachandra, Chinni. dan H.Venkateswara Reddy. 2013. Iris Recognition based on Pupil using Canny edge detection and K-Means Algorithm. International Journal Of Engineering And Computer Science ISSN:2319-7242 Volume 2 Issue 1 Jan Page No. 221-225.
-
[8] loy, gareth. 2004. fast shape-based road sign detection for a driver
Assistance System. Computer Vision andActive Perception Laboratory Royal Institute of Technology (KTH).
-
[9] Menteri Perhubungan RI. 2004. Rambu Lalu Lintas.
-
[10] Neibur, Ernst. 2007. Saliency Map.
-
[11] Parikh,N, L Itti, dan J. Weiland. 2010. Saliency-Based Image Processing ForRetinal Prostheses . Journal Of Neural Engineering J. Neural Eng. 7 (2010) 016006 (10pp).
-
[12] Polatsek , Bc. Patrik. 2015. Spatiotemporal Saliency Model Of Human Attention In Video Sequences (Thesis).
-
[13] Powers, David M W. 2011. Evaluation: From Precision, Recall and F-Factor to ROC, Informedness, Markedness & Correlation. Journal of Machine Learning Technologies (2011) 2 (1): 37-63 [online].
-
[14] Putra, Dharma. 2010. Pengolahan Citra Digital. Yogyakarta: Andi.
-
[15] Putra, Dharma. 2009. Sistem Biometrika. Yogyakarta: Andi.
-
[16] Rambe, SJ. 2011. Bab 2 Landasan Teori Citra Digital.
-
[17] Treisman, Anne M. dan Garry Gelade. 1980. A Feature-Integration Theory Of Attention. Cognitive Psychology, vol. 12, pp. 97-136, 1980.
-
[18] Won,Woong-Jae, Sungmoon Jeong, dan Minho Lee. 2007. Road Traffic Sign Saliency Map Model. Proceedings of Image and Vision Computing New Zealand 2007, pp. 91–96, Hamilton, New Zealand.
-
[19] Zhang, Jianming dan Stan Sclaroff . 2013. Saliency Detection: A Boolean Map Approach. Journal IEEE International Conference on Computer Vision (ICCV).
Discussion and feedback