PERANCANGAN DAN PEMBUATAN SISTEM PENGENDALI ROBOT DENGAN MENGGUNAKAN ISYARAT PUPIL MATA
on
Buletin Fisika Vol. 13 No. 1 Pebruari 2012 : 9 - 13
PERANCANGAN DAN PEMBUATAN SISTEM PENGENDALI ROBOT DENGAN MENGGUNAKAN ISYARAT PUPIL MATA
I Wayan Supardi1, Fahim Mamduh1, N. Nyoman Rupiasih1, Pt Widyatmika1
1,2,3Jurusan Fisika, Fakultas Matematika dan Ilmu Pengetahuan Alam, Universitas Udayana, Kampus Bukit Jimbaran, Badung, Bali Indonesia 80361.
Email : supardi_wayan@yahoo.co.id
Abstrak
Telah dibuat sistem pengendali robot dengan menggunakan isyarat posisi pupil mata dengan metode motion detection. Metode ini mendeteksi perubahan gambar sebagai proses pergerakan. Citra dari pupil mata ditangkap oleh sebuah webcame dan selanjutnya dirubah ke dalam skala keabuan (gray scale). Untuk menentukan arah gerak prototipe robot, digunakan aturan segmentasi yaitu pembagian area dari citra yang didapat. Di setiap area gambar atau satu sel segmentasi akan dikenakan satu detektor, dan jika terjadi pergerakan di area itu akan dilaporkan dalam persentasi pergerakan. Nilai persentasi pergerakan ini diumpankan ke port paralel sehingga dapat menggerakkan prototipe robot ke arah maju, belok kanan, belok kiri, dan berhenti.
Kata Kunci: prototipe robot, pupil mata, citra,gray scale, motion detection.
Abstract
It has designed and constructed a robot control system using positions eye pupil cues with motion detection method. The method detects changes in image as a process of movement. The image of the eye pupil was captured by a webcam and subsequently converted into a gray scale. To determine the direction of motion of the prototype robot, has been used the rules of segmentation e.g. the division of area of the image obtained. In every area of an image or segmentation unit will be set to a detector, and if there is movement in that area will be reported in the percentage of movement. Percentage value of the segmentation cells is fed to the parallel port so the prototype robot can move forward, turn right, turn left, and stop.
Keywords: prototype robot, eyes pupil, image, gray scale, motion detection.
control yang dijalankan oleh tangan manusia (Tharom, 2000; Harjanto, 2006; Setiawan, 2006; Andi 2010; Kurniawan, 2012). Dalam hal ini diperlukan beberapa teknik pengendali robot yang sesuai dengan kebutuhan, seperti penggunaan robot untuk pelayanan di rumah sakit, pada industri obat, dan pada industri lainnya.
Salah satu penggunaan robot di rumah sakit adalah kursi roda. Kursi roda berfungsi sebagai alat bantu bagi penderita stroke (kelumpuhan), ataupun untuk melayani pasien dalam proses diagnose yang biasanya memerlukan banyak pergerakan (dari satu ruangan ke ruangan lainnya). Kursi roda ini 9
pada umumnya digerakkan oleh tangan, atau menggunakan remote control tangan. Tentunya kondisi ini akan menjadi sangat sulit bagi penderita stroke. Sehingga dalam hal ini sangat diperlukan suatu teknik baru untuk menggerakkan kursi roda.
Sesuai dengan latar belakang tersebut di atas, maka dalam penelitian ini telah dirancang salah satu teknik pengendalian robot dengan menggunakan isyarat ”posisi pupil mata” (Wulandari, 2007). Pengendalian robot dengan isyarat posisi pupil mata ini menggunakan metode motion detection, yakni mendeteksi perubahan gambar sebagai proses pergerakan. Untuk menentukan arah gerak prototipe robot, digunakan aturan segmentasi yaitu pembagian area dari citra yang didapat (Usman, 2005). Di setiap area gambar atau satu sel segmentasi dikenakan satu detektor, dan jika terjadi pergerakan di area itu akan dilaporkan dalam persentase pergerakan.
Langkah awal pada penelitian ini adalah membuat diagram blok, seperti tampak pada Gambar 1.
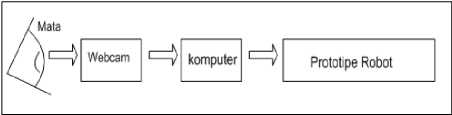
Gambar 1. Blok diagram prototipe robot kursi roda dengan menggunakan isyarat posisi pupil mata.
Langkah pertama yang dikerjakan adalah perancangan dan pembuatan perangkat lunak. Kemudian dilakukan interkoneksi dengan komponen-komponen lainnya agar sistemnya bisa berjalan. Sebagai antarmuka webcam dengan PC digunakan komponen tvvideograbber. Komponen tvvideograbber menangkap sumber video analog atau digital DV camcorders, HD camcorders, USB webcams, IP cameras, composite PCI cards,
IEEE1394 cameras, dan USB video capture device.
Perangkat lunak juga berfungsi untuk mengolah masukan yang diterima PC dari webcam berupa hasil citra untuk mengaktifkan pin pada port paralel (DB-25). Tegangan keluaran dari pin port paralel digunakan sebagai input untuk rangkaian pengontrol prototipe robot kursi roda sehingga prototipe bisa bekerja.
Perangkat keras dari sistema pengendali robot dengan menggunakan isyarat posisi pupil mata dapat dilihat pada Gambar 2. Tampilan menu utama dari perangkat lunak yang dibangun disajikan pada Gambar 3. Pada menu utama terdapat berbagai pilihan diantaranya sumber video, pengambilan gambar, segmentasi gambar, LPT index, diskoneksi port/koneksi port,

Gambar 2. Sistem pengendali robot dengan menggunakan isyarat posisi pupil mata. (1) PC, (2) Webcam, (3) Remote control, (4) Prototipe robot.
kendali automatis/kendali manual, kamera control, dan Camera control. Adapun fungsi dari masing-masing pilihan adalah sebagai berikut:
-
1. Sumber video: berfungsi sebagai
tampilan dari citra yang didapatkan dari webcam.
-
2. Pengambilan gambar: berfungsi seba-gai hasil citra yang telah di gray scale.

Gambar 3. Tampilan menu utama.
-
3. Segmentasi gambar: berfungsi sebagai pembagi area citra yang dimana pada tiap kolom segmentasi akan diberi satu detektor yang nantinya akan memberikan persentase tiap pergerakan.
-
4. LPT index: berfungsi untuk memilih port paralel yang digunakan.
-
5. Diskoneksi port/koneksi port: berfung-si untuk menyambung/memutus port paralel dengan PC.
-
6. Kendali automatis/kendali manual: berfungsi sebagai pilihan yang digunakan untuk mengoperasikan sistem pengendali.
-
7. Kamera kontrol terdapat beberapa pilihan, diantaranya adalah :
-
a. Sumber perangkat kamera: berfungsi untuk memilih webcam yang akan digunakan.
-
b. Brightness: berfungsi untuk mengatur tingkat kecerahan citra.
-
c. Contrast: berfungsi untuk mengatur nilai range interval pada setiap nilai gray scale.
-
d. Hue: berfungsi untuk menentukan
warna yang akan digunakan.
-
e. Saturation: berfungsi untuk mengatur suatu warna yang tidak dapat diperbaharui oleh sinar putih.
-
f. Kepekaan deteksi : berfungsi untuk menguji perubahan nilai di tiap pixel
dalam kolom segmentasi yang dihasilkan dalam persen segmentasi.
-
8. Camera control: berfungsi untuk menjalankan sistem pengendali robot.
Sistem pengendali robot dengan menggunakan isyarat posisi pupil mata ini bisa diatur secara manual maupun otomatis. Terdapat beberapa perbedaan antara menu manual dan menu otomatis. Pada menu manual, webcam tidak digunakan untuk mengendalikan robot, dimana menu manual sudah diprogram untuk mengendalikan robot dengan cara menekan tombol yang sudah disiapkan pada menu manual dan di menu ini tidak memfungsikan pengaturan warna yakni brightnes, contrast, hue dan saturation dan kepekaan deteksi. Menu otomatis merupakan kebalikan dari menu manual dimana pada menu ini menggunakan webcam sebagai input untuk mengontrol robot dan juga memfungsikan brightnes, contrast, hue dan saturation sebagai pengatur citra yang diperoleh dari webcam.
Jarak optimum webcam dengan mata ditentukan dengan cara melakukan karakterisasi. Data karakterisasi untuk menentukan nilai optimum jarak webcam terhadap mata pada saat gerak maju dapat dilihat pada Gambar 4.
Dari Gambar 4 dapat disimpulkan bahwa jarak optimum webcam dengan mata yaitu 3 cm. Maka pengambilan data pada penelitian ini dilakukan dengan menggunakan jarak 3 cm. Juga dilakukan karakterisasi kecepatan pada prototipe robot untuk mengetahui persentase yang mempengaruhi kecepatan pada prototipe robot tersebut, seperti tampak pada Gambar 5.
Dari Gambar 5 dapat disimpulkan bahwa karakterisasi derajat keabuan (gray scale) fungsi waktu untuk jarak 1 m relatif konstan dan pada derajat keabuan yang lain tidak berpengaruh pada kecepatan. Cara kerja pada menu manual yaitu dengan cara memilih
terlebih dahulu menu kendali manual, kemudian pengguna bisa mengontrol prototipe robot kursi roda dengan cara menekan tombol kontrol pada menu manual (maju, kiri, kanan, stop dan berhenti). Sedangkan pada menu otomatis, pengguna terlebih dahulu menggunakan webcam sebagai sensor yang didekatkan pada mata dengan jarak optimum 3
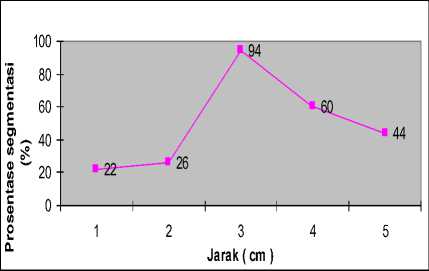
Gambar 4. Karakterisasi jarak webcam terhadap mata.
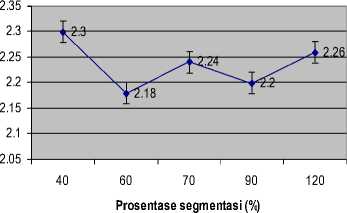
Gambar 5. Karakterisasi derajat keabuan (gray scale) fungsi waktu pada jarak tetap 1 m.
cm, pada tampilan perangkat lunak dipilih menu otomatis dan diatur LPT index-nya untuk memilih port paralel yang digunakan dan dikoneksikan, selanjutnya diatur sumber perangkat kamera untuk memilih webcam yang digunakan dan langkah terahir yaitu pada camera control dipilih tombol mulai.
Pada hasil ini menggunakan sample lima orang dengan jenis pupil mata yang berbeda yakni dari warna coklat sampai hitam. Hasil yang didapatkan dari semua sample ini disimpulkan bahwa prototipe robot kursi roda bisa bekerja jika hasil persentasi pada
segmentasi yang didapatkan minimal 40% dan nilai persentasi kolom pada segmentasi yang tertinggi akan menentukan arah gerak prototipe robot kursi roda. Setiap pergerakan diambil 5 datauntuk setiap satu orang, sehingga satu orang diambil 20 contoh pergerakan posisi pupil mata yaitu gerakan posisi pupil mata saat di tengah, kiri, kanan dan saat mata dipejamkan. Semua hasil pengamatan bisa dilihat pada Lampiran.
Pada dasarnya sistem pengendali robot dengan menggunakan isyarat pupil mata yang dibangun memanfaatkan posisi pupil mata yang digunakan sebagai pengontrol kerja dari robot.
Pengambilan citra dilakukan dengan cara menempatkan kamera (webcam) yang didekatkan dengan mata. Semakin jauh jarak antara mata dengan webcam maka citra yang didapatkan semakin tidak fokus, begitu pula dengan penempatan kamera dengan mata yang sangat dekat akan menghasilkan citra yang kurang sesuai dengan yang diinginkan. Jarak yang optimum digunakan pada penelitian ini yaitu 3 cm. Pengambilan citra harus dilakukan di tempat yang terang agar citra yang dihasilkan sesuai dengan citra aslinya.
Citra yang didapatkan dari webcam diubah ke bentuk gray scale, selanjutnya dilakukan proses segmentasi. Mengingat jumlah arah gerak yang diperlukan adalah 4 arah gerak, maka digunakan aturan segmentasi yaitu pembagian area dari citra yang didapat. Di setiap area gambar atau satu sel segmentasi dikenakan satu detektor, dan jika terjadi pergerakan di area itu, maka dilaporkan dalam persentase pergerakan. Area dibagi dalam bentuk segmentasi area kotak dan menyesuaikan dengan tujuan kendali alat yaitu maju, kanan, kiri dan berhenti. Untuk keperluan tersebut segmentasi yang diambil adalah sebuah area kotak berukuran 3 baris × 3
kolom. Dari kesembilan area tersebut yang diambil deteksi pergerakanya adalah atas tengah untuk gerak maju, kiri tengah untuk gerak ke kiri, kanan tengah untuk gerak ke kanan dan area tengah untuk posisi berhenti.
Dalam pengambilan gambar, posisi pupil mata diproses lebih lanjut untuk ditentukan keluarannya, yang akan dikirim ke robot dengan menggunakan port paralel sebagai antarmuka. Pin 2 sampai 5 dari port paralel dihubungkan pada rangkaian remote control. Keluaran dari port paralel diumpankan kesebuah rangkaian penggerak (Darlington driver) yang komponennya terdiri dari empat transistor BC109, resistor 1kΩ dan dioda 1N4002.
Secara keseluruhan, sistem pengendali robot dengan menggunakan isyarat posisi pupil mata ini telah dapat mengendalikan prototipe robot dengan baik. Sistem ini juga sangat sensitif terhadap perubahan gerakan, sehingga diperlukan kecermatan dalam pengoperasiannya.
Dari penelitian ini dapat diambil kesimpulan sebagai berikut:
-
1. Telah berhasil dibuat sistem pengendali robot dengan menggunakan isyarat posisi pupil mata dengan dua cara pengontrolan yaitu dengan otomatis dan manual.
-
2. Sistem pengendali robot dengan menggunakan isyarat posisi pupil mata ini bisa bekerja jika nilai persentase pada segmentasi yang didapatkan minimal 40 derajat keabuan (gray scale) dan nilai persentase kolom pada segmentasi yang tertinggi akan menentukan arah gerak prototipe robot.
Berdasarkan dari hasil penelitian yang sudah dilakukan, untuk pengembangan aplikasi selanjutnya adalah peran komputer sebagai pengatur dari aplikasi sistem pengendali robot dengan menggunakan isyarat posisi pupil mata dapat dikembang-kan dengan menggunakan mikrokontroler.
DAFTAR PUSTAKA
Andi Adriansyah. “Sebuah Model Berbasis Pengetahuan Untuk Pengendalian Formasi Sistem Robot Majemuk”. TEL-KOMNIKA: Indonesian Journal of Electrical Engineering, 8, 2, 2010
http://telkomnika.ee.uad.ac.id/n9/files/ Vol.8 No.2 Agt10/8.2.8.10.02.pdf (akses pada: 30 Mei 2012).
Harjanto, Stevanus Nico. dkk. 2006. Mobile Robot Yang Dikontrol Dengan Teknologi Bluetooth. www.petra.ac.id. di akses tanggal 16 februari 2006.
Kurniawan I. L., Iwan Setiawan, ST, MT, Dar-jat, ST, MT. “Pengendalian Robot Mobil Pencari Target Dengan Kemampuan Menghin dari Rintangan”. Makalah Seminar Tugas Akhir. https://docs.google.com/ file/d/1I6st87fubYnLkiJ38gTgNuHNRJNf 7jCHUvLznukVptCmdwmKl2xTPqn2QJj/ edit (akses pada: 30 Mei 2012).
Setiawan, Iwan, Trias A., Darjat, Rancang Bangun Sistem Kontrol Robot Mobil untuk Keperluan Navigasi Darat Berbasis Tray-ektori Bezier, Universitas Diponegoro,
2006.
Tharom, Tabratas dan Onno W. Purbo. 2000. Pengolahan Citra Pada Mobil Robot. Penerbit ITB. Bandung.
Usman, Ahmad. 2005. Pengolahan Citra Digital dan Teknik Pemrogramannya. Penerbit Graha Ilmu. Yogyakarta.
Wulandari, Novi. 2007. Perubahan Pupil CycleTime. www.usu.ac.id.di akses tanggal 12 juni 2007.
13
Discussion and feedback