Perancangan Sistem Telemetri Untuk Pengukuran Level Air Berbasis Ultrasonic
on
C-003
Prosiding Conference on Smart-Green Technology in Electrical and Information Systems
Bali, 14-15 November 2013
Perancangan Sistem Telemetri Untuk Pengukuran Level Air Berbasis Ultrasonic
Taufiqurrahman
Hazard & Disaster Research Center Politeknik Elektronika Negeri Surabaya Kampus PENS – Sukolilo, Surabaya 60111 taufiq@eepis-its.edu
Achmad Basuki
Hazard & Disaster Research Center Politeknik Elektronika Negeri Surabaya Kampus PENS – Sukolilo, Surabaya 60111 basuki@eepis-its.edu
Yafie Albana
Hazard & Disaster Research Center Politeknik Elektronika Negeri Surabaya Kampus PENS – Sukolilo, Surabaya 60111 yafie@eepis-its.edu
Abstrak — Makalah ini membahas tentang metode eksperimental yang dilakukan dalam peringatan dini dengan membuat piranti yang mampu membaca data pengukuran secara real-time serta mengurangi noise dari setiap pengukuran. Hasil pembacaan data dari piranti ini diolah menjadi sebuah konsep data terintegrasi untuk peringatan dini luapan banjir. Penelitian ini diawali dengan pembuatan alat untuk mendeteksi ketinggian permukaan air sebagai data akuisisi.
Penelitian ini menggunakan sensor ultrasonic yang jarak pembacaannya bisa dikompensasikan dengan suhu lingkungan. Setiap hasil pengukuran nantinya akan dikirim melalui komunikasi tanpa kabel (wireless) dengan konsep jaringan sensor terpadu. Sensor-sensor tersebut akan bertindak sebagai node yang selanjutnya akan mengirim data secara wireless menggunakan perangkat xbee pro kepada node koordinator. Kemudian node koordinator mengirimkan data ke komputer melalui komunikasi serial RS232 untuk dilakukan pemantauan terhadap perubahan ketinggian permukaan air sebagai salah satu indikator penyebab banjir.
Dari pengujian beberapa sensor ultrasonic PING))), SRF04 dan MaxSonar didapatkan beberapa data dengan tingkat kepercayaan yang relatif merata terhadap pembacaan level air yang diam. MaxSonar memiliki kelayakan dalam penggunaan sensor level sebesar 90% dengan tipe pembacaan data berbasis digital.
Kata kunci— ultrasonic; ketinggian air, akuisisi data.
I. PENDAHULUAN
Informasi dari hasil pemantauan level ketinggian air di kendali buka-tutup pintu air merupakan informasi penting dalam sebuah sistem peringatan dini bencana banjir di daerah bantaran sungai. Informasi ini harus akurat dan bisa disampaikan secara real-time dalam sebuah sistem yang terintegrasi. Sehingga ada dua isu penting dalam hal ini yaitu sensor dan sistem komunikasi.
Banyak ragam alat pemantau ketinggian air masih berbasis konvensional seperti pengukuran dengan teknik elevasi terutama pada pintu air sisi hilir. Ulrich Barjenbruch dan Stephan Mai[1][3][4] menawarkan prinsip “Radar Level Gauges” yang sangat baik dalam menunjukkan pengukuran level air, hanya saja dalam implementasinya tidak mudah karena menggunakan asumsi keadaan ideal yang sulit dilakukan untuk pintu-pintu air dengan riak air yang cukup
besar. Srikanth dkk [2][5] menggunakan smart sensor digabungkan dengan microprosesor yang berbasis FPGA untuk melakukan pemantau level air. Sistem ini termasuk mahal untuk implementasi dengan skala besar.
Dalam penelitian ini diusulkan menggunakan sensor ultrasonic sebagai alat pengukur ketinggian level air diletakkan di dekat pintu air dan WSN sebagai perangkat komunikasi untuk memudahkan para operator memantau perubahan ketinggian air. Sistem pemantau ini menghasilkan suatu tampilan informasi yang mampu memberikan gambaran perubahan ketinggian air. Tampilan informasi ini bisa banyak cara diantaranya :
-
> Tampilan informasi berupa suara jika level air mencapai batas yang ditentukan
-
> dan, tampilan informasi berupa teks yang berbasis LED dengan berukuran besar.
-
> Dimungkinkan informasi bisa terintegrasi secara realtime pada tempat kerja.
Harapannya informasi tersebut bisa memudahkan operator di lapangan untuk melakukan keputusan. Tidak menutup kemungkinan informasi tersebut bisa dibpublikasi melalui jaringan semisal jaringan seluler berupa SMS atau jaringan internet mobile. Infrastruktur tersebut harus dibuat dahulu berupa modul data akuisisi yang membaca level ketinggian permukaan air pada pintu air.
Penelitian ini merupakan sebagai tahap awal perencanaan. Titik beratnya adalah bagaimana merancang suatu mekanisme desain perangkat keras sebagai pemantau dalam pengukuran level ketinggian air di pintu air. Dimana ada beberapa kriteria dalam desain tersebut, diantaranya :
-
■ Kemampuan pembacaan level air secara real-time
-
■ Alat tersebut mandiri sehingga tidak menggangu operator di pintu air
-
■ Kehandalan alat ketika dijalankan secara terus-menerus tanpa ada error
-
■ Informasi yang layak bisa dibaca oleh operator.
-
II. TINJAUAN PUSTAKA
-
A. Teknik Pengukuran dan Pemantauan
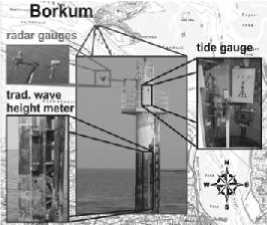
Di dalam sebuah model perancangan untuk membuat alat pengukur level air terdapat banyak kriteria pengukuran pada saat pengukuran berdasarkan ketinggian level air dengan skala kecil hingga menengah. Salah satu konsep yang ditawarkan adalah sistem pemantau dengan berbagai macam sensor pintar seperti dijabarkan oleh Ulrich Barjenbruch dan Stephan Mai[1][3][4]. Pada papernya mereka melakukan pengukuran level air menggunakan prinsip ”Radar Level Gauges”.

Gambar 1. Prinsip Pengukuran “Radar Level Gauge” [1]
Penelitian tersebut menghasilkan sistem sensor yang akurat dalam membaca ketinggian air. Dilakukan kalibrasi dalam mengukur akurasi ketinggian air. Di dalam implementasinya dilaksanakan dengan sistem yang fantastis dimana proses pengerjaannya dibuat sedemikian rupa pada kondisi riil yang pada penempatannya susah dijangkau oleh
manusia.
(c) Data GUI
Gambar 3. Prinsip Monitoring pada Smart Sensor [2]
Sistem pengiriman data mempunyai banyak cara untuk bisa dilakukan secara real-time, termasuk pengiriman melalui kabel atau nirkabel. Untuk mekanisme komunikasi nirkabel bias memanfaatkan gelombang 2.4 GHz atau jaringan pada vendor seperti GPRS atau SMS. Andrew J. Whitlte dkk[6][7] telah mempresentasikan penggunaan GSM Modem dan Zigbee sebagai transfer data secara nirkabel.
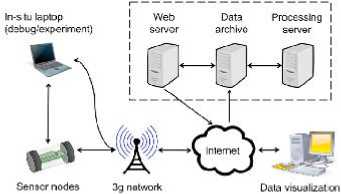
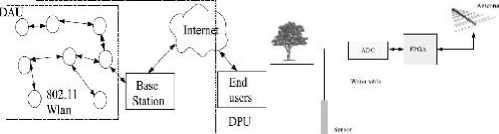
Gambar 4. Arsitektur WaterWise@SG [6]
-
B. Sensor Ultrasonic
Gambar 2. Implementasi Monitoring Water Level
Sensor ultrasonic adalah sensor yang bekerja berdasarkan prinsip pantulan gelombang suara. Frekuensi kerja sensor ultrasonic ini ada pada daerah di atas gelombang suara yaitu dari 40 KHz hingga 400 KHz. Sensor ultrasonic terdiri dari dari dua unit, yaitu unit pemancar dan unit penerima. Gelombang ultrasonic yang dipancarkan ke udara (tempat sekitarnya), dan pantulan gelombang ultrasonic akan terjadi bila ada obyek tertentu, dan akan diterima kembali oleh unit sensor penerima. Sensor penerima akan menghasilkan sebuah tegangan bolak-balik dengan frekuensi yang sama.
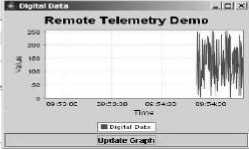
Penelitian berikutnya menggunakan sensor pintar yang dipresentasikan oleh Srikanth dkk [2][5]. Sistem ini menggabungkan sensor pintar dengan sistem kendali yang berbasis FPGA untuk melakukan pemantau level air. Data yang dihasilkan dikirim secara nirkabel dengan teknik pengiriman data secara telemetri.
ι>ιu
(a) Konsep Telemetri (b) Data Akuisisi
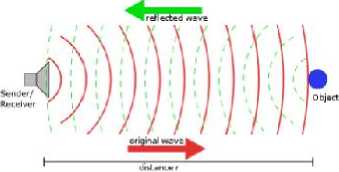
Gambar 5. Prinsip Kerja Ultrasonic
Jarak antara sensor dengan objek yang direfleksikan dapat dihitung dengan menggunakan rumus:
r=0.5 ×TOF × c…………….(1)
dimana:
r = jarak ke objek (distance).
TOF = waktu pengukuran yang diperoleh.
c = cepat rambat suara di media penghantar
-
C. Kompensasi Temperature pada Kecepatan Suara
Sensor suhu digunakan untuk menghitung pengaruh perubahan suhu terhadap kecepatan dari pancaran gelombang ultrasonic. Berdasarkan teori tentang kecepatan suara, kecepatan suara pada udara dipengaruhi oleh berbagai faktor, antara lain suhu dan kelembaban udara. Kelembaban udara bisa tidak diperhitungkan karena penempatan sensor akan dibuat sedemikian rupa sehingga udara yang dilewati sensor cenderung tidak berubah kelembabannya. Yang menjadi konsentrasi adalah perubahan suhu dari udara karena sensor akan ditempatkan di ruangan terbuka yang terkena panas matahari langsung. Perhitungan korelasi antara kecepatan suara dan perubahan suhu adalah sebagai berikut:
⅛r = (331J + (0 m.s-1.............(2)
dimana :
cair = kecepatan udara di udara.
ϑ = suhu udara (oC).
-
D. Komunikasi Nirkabel
Penelitian ini menggunakan Xbee-pro sebagai perangkat komunikasi nirkabel. Perangkat XBee-pro merupakan modul RF yang didesain dengan standard protokol IEEE 802.15.4 sesuai dengan kebutuhan yang sederhana untuk jaringan sensor nirkabel. XBee-pro hanya membutuhkan energi yang rendah untuk beroperasi dan mempunyai dimensi fisik yang kecil sehingga praktis dalam penempatan. Modul ini beroperasi pada rentang frekuensi 2.4 GHz.
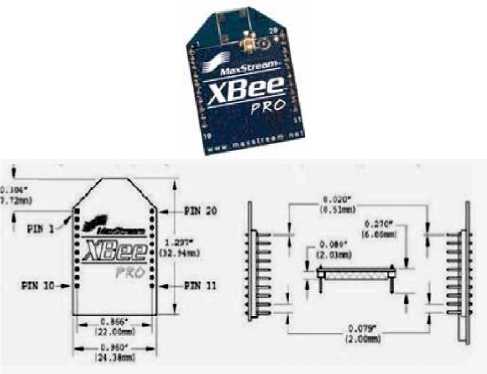
Gambar 6. XBEE-PRO dan Dimensi[6]
-
III. PERENCANAAN SISTEM
Secara umum makalah ini menjelaskan bagaimana membuat alat pemantau level air. Permasalahan yang diangkat berdasarkan ilustrasi seperti pada gambar 7 yang memerlukan penyelesaian dalam desain hardware dan sistem pamantau level air.
Gambar 7. Studi kasus yang diangkat dalam penelitian.
-
A. Pengukuran Ketinggian Air pada Lokal Area
Untuk memastikan data pengukuran ketinggian air benar-
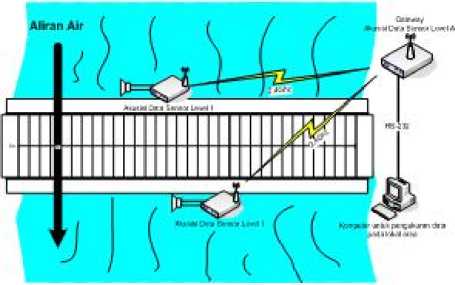
benar terkirim real-time diperlukan sebuah mekanisme sistem pemantau pada lokal pengukuran ketinggian air secara langsung. Desain yang ditawarkan adalah seperti gambar 8.
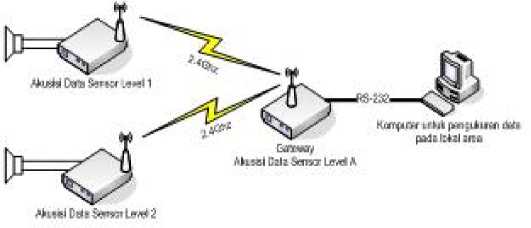
Gambar 8. Pengukuran Level Air pada Lokal Area
Pada gambar 8 pengiriman data dari setiap akuisisi data sensor level 1 dan 2 dikirim secara nirkabel menuju gateway. Sedangkan pada sisi server menampilkan data pengukuran secara real-time berdasarkan data pada gateway. Mekanisme yang dilakukan oleh gateway adalah melakukan request ke setiap akuisisi data sensor level 1 dan 2. Periodik yang dilakukan sistem gateway direncanakan setiap 10 detik dan dilakukan proses filter untuk memastikan data tersebut benar. Gateway melakukan permintaan data melalui prosedur yang sudah ditentukan terutama pada protokol format data yang harus dirancang terlebih dahulu. Server melakukan monitoring data di saat gateway memberikan dan menerima data terakhir. Dan memberikan status kesiapan data sensor dari data yang diminta.
-
B. Rancangan Kontroller berbasis Nirkabel
Modul Jaringan Sensor Nirkabel atau Wireless Sensor Network (WSN) merupakan sebuah modul pengembangan yang didesain secara khusus untuk aplikasi WSN. Modul WSN telah dilengkapi dengan berbagai macam sensor seperti pengukuran suhu, kelembaban, tekanan dan tersedia terminal ekspansi sensor yang dapat digunakan oleh pengembang.
• Modul Kontroller Nirkabel
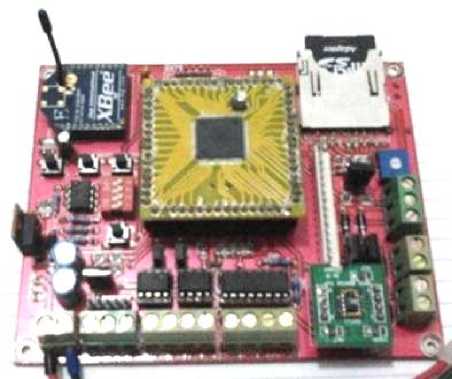
Gambar 9. Development Board Nirkabel
• SPESIFIKASI MODUL
Tabel 1. Spesifikasi Modul Nirkabel
|
PROPERTI |
NAMA ITEM |
KETERANGAN |
|
Controller |
ATMega128L |
TQFP, 8MHz |
|
Sensor |
SHT11 Module |
Antarmuka Serial Synchronous |
|
Loadcell (Berat) |
Penguat Instrumentasi INA125P | |
|
Analog Input |
Tersedia | |
|
Display |
LCD |
Antarmuka 4-bit |
|
Comm. |
XBee Series 1 |
Terpasang |
|
RS422 |
Terpasang | |
|
Storage |
SD Card 1 Gb |
Antarmuka SPI |
|
Power supply |
AN7805 LM117 |
Input : 12 V DC Output : 5V DC dan 3,3V DC |
|
RTC |
DS1307 |
w/ CR2032 battery |

Gambar 10. Hasil Pengukuran di Lokal pada Modul
-
IV. HASIL PENGUKURAN DAN ANALISA
Terdapat beberapa mekanisme pengukuran yang dilakukan pada bagian ini diantaranya:
-
1. Pengujian kontroller nirkabel
-
2. Pengujian sensor ultrasonic SRF04
-
3. Pengujian sensor ultrasonic PING)))
-
4. Pengujian sensor ultrasonic MaxSonar
-
A. Uji Pengukuran pada Lokal Modul
Pengujian ini melibatkan beberapa module yaitu:
-
1. Komunikasi secara wireless menggunakan Xbee
-
2. Sensor: SHT11, DS18B20 dan ultrasonic
-
3. Terdapat Real Time Clock
-
4. Dan, media storage berupa MMC
Berikut hasil loging data via wireless ditampung pada terminal X-CTU yang merupakan hasil pengukuran. Data frame tersebut adalah level air [Cm], temperature [°C] dan data RTC [waktu dan tanggal] yang dikemas dalam satu frame format protokol.

Gambar 11. Hasil Pengukuran Level Air dan Temperature pada Perangkat Lunak XCTU
-
B. Pengukuran Level Air dengan SRF04
Dari hasil pengujian, perbedaan yang mencolok terjadi pada saat pembacaan data ketinggian dibawah 2 meter. Yaitu batas minimum pembacaan data sensor adalah 3 cm. Jika dibawah itu, maka data tidak akan dapat dibaca dengan sempurna. Apabila sensor ultrasonic membaca terlalu dekat, maka pantulan gelombang ultrasonic yang dipancarkan oleh transmitter akan diterima secara langsung oleh bagian receiver dari sensor ultrasonic tersebut. Hasil perhitungan dari pengambilan nilai rata-rata error yang dihasilkan dari percobaan ini menggunakan metode standard deviasi adalah sebagai beriktu :
S = √(4.4849 – 0.6460)/21 = 0.1914
Tabel 2. Hasil Pengukuran dengan SRF04
|
NO |
REAL(cm) |
US SRF04 (cm) |
ERROR PERSEN (%) |
|
1 |
0 |
3 |
~ |
|
2 |
1 |
3 |
200 % |
|
3 |
2 |
3 |
50 % |
|
4 |
3 |
4 |
33 % |
|
5 |
4 |
5 |
25 % |
|
6 |
5 |
5 |
0 % |
|
7 |
6 |
7 |
16,67 % |
|
8 |
7 |
7 |
0 % |
|
9 |
8 |
9 |
11,11 % |
|
10 |
9 |
9 |
0 % |
|
11 |
10 |
11 |
10 % |
|
12 |
15 |
16 |
6,67 % |
|
13 |
20 |
21 |
5 % |
|
14 |
25 |
26 |
4 % |
|
15 |
30 |
31 |
3,33 % |
Jadi menurut perhitungan menggunakan metode standard devisiasi, didapatkan nilai rata-rata error sebesar 0.1914 atau 19,14 %. Nilai error yang cukup besar. Hal ini mungkin disebabkan oleh nilai error yang dihasilkan sensor pada saat pembacaan jarak kurang dari 3 cm. Pada saat pembacaan jarak kurang dari 3 cm, sensor selalu menunjukkan data 3cm, karena karakterisitik dari sensor srf04 itu sendiri yang hanya mampu membaca jarak/range antara 3 cm – 300cm.
-
C. Teknik Pengukuran Objek pada dan Cair dengan PING)))
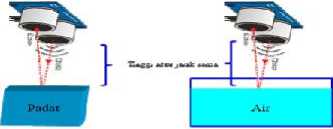

Gambar a : Iiasil pengukuran jarak terhadap air. gambar b : hasil pengukuidujarak Ieiliiidupbeudu padu..
Gambar 12. Pengukuran dengan Ultrasonic PING)))
Didapatkan pengukuran sesungguhnya menggunakan meteran sepanjang 17Cm. Dari informasi gambar diatas didapatkan prosentase error yaitu :
-
> Objek padat = 1,05 %
-
> Objek cair = 3.23 %
Data pengukuran air jernih dan keruh ketika bergerak sebagai berikut :
Tabel 3. Hasil Pengukuran Level Air Jenih dan Keruh
|
Mereran (Clll) 10 |
Air jernih (tin) 105 |
Air keruh (cm) 10.19 |
*⅜4>Π W (%) air jernih 5 |
*¾oιτor (%) air keruh 1.9 |
|
11 |
1094 |
10.87 |
0.545454545 |
1.181818182 |
|
12 |
11'1 |
11.87 |
2.416666667 |
1.083333333 |
|
B |
12.83 |
12.88 |
1.307692308 |
0.923076923 |
|
14 |
13.9 |
13.95 |
0.714285714 |
0.357142857 |
|
15 |
1181 |
14.87 |
1.266666667 |
0 866666667 |
|
16 |
16.03 |
15.76 |
0.1875 |
1.5 |
|
17 |
16 86 |
16.65 |
O.S23529-112 |
2.058823529 |
|
18 |
17.98 |
17.72 |
0.111111111 |
1.555555556 |
|
19 |
1882 |
18.72 |
0.947368421 |
1.473684211 |
|
20 |
1992 |
19.8 |
04 |
1 |
|
Rara |
rara 0Aifrror (%) |
1.25 |
1.26 | |
*NB = 0∙'ozjror dim SelisihiiHilltik air jernih dengan air keiuh
-
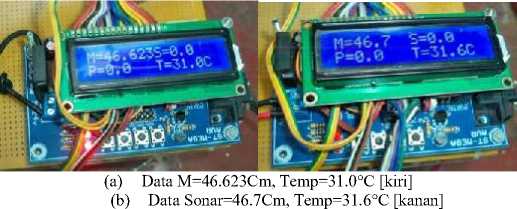
D. Pengukuran Level Air dengan MaxSonar
Cara mengukur dan menguji sensor Max Sonar tampak
seperti gambar berikut ini, dimana masih menggunakan

rototype didalam pengukuran saat itu.
Gambar 16. Pengukuran Level Air dengan MaxSonar
Sedangkan riil pengukuran yang dilakukan secara manual menggunakan meteran manual didapatkan hasil antara 46 hingga 47 cm. Dari pembacaan menggunakan mikrokontroller didapatkan hasil yaitu 46.623 Cm pada temperature 31ºC. Dan sesekali mengalami fluktuasi pembacaan seperti tampak gambar dengan hasil pembacaan 46.7Cm dan 31.6ºC.
Gambar 17. Fluktuasi Level Air dengan MaxSonar
Dari hasil pengukuran yang dilakukan mulai pukul 08:49:19 s/d 08:51:14 didapatkan data sebanyak 61 data. Kemudian hasil dari data tersebut digrafikkan tampak gambar berikut ini.
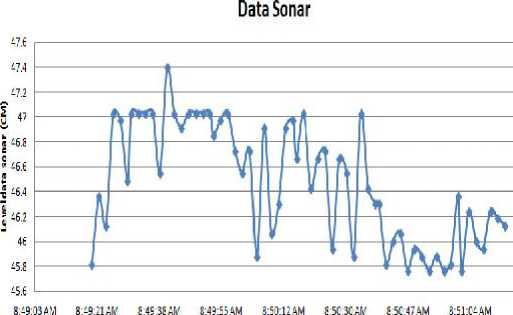
Waktu fenμnt∣3i
Gambar 17. Grafik Fluktuasi Pengukuran Level Air dengan MaxSonar pada kestabilan 46-47 Cm
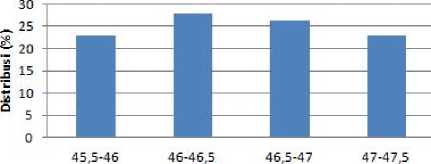
Kemudian dilakukan pengujian distribusi pengukuran level air berdasarkan data dari gambar 17. Distribusi data menggunakan jangkauan 0.5cm pada setiap item data. Distribusi data menunjukkan rerata sebesar 46.48 cm dan tingkat kepercayaan data sebesar 90% pada range normal 45.72 – 47.24 cm seperti terlihat pada gambar 18. Dari distribusi data ini terlihat bahwa data pengukuran masih terlihat stabil dengan jangkauan sekitar 1,5cm untuk pada keadaan ketinggian air yang diam.
Distribusi level data sonar
pengukuran jarak direkomendasikan menggunakan sensor US dengan tipe MaxSonar yaitu LV-MaxSonar-EZ1
DAFTAR PUSTAKA
-
[1] Ulrich Barjenbruch, “Monitoring of water level, waves and ice with radar gauges”, HYDRO 2002.
-
[2] Srikanth Anumalla, Byrav Ramamurthy, “Ground Water Monitoring using Smart Sensors”. IEEE International Conference on Electro Information Technology, 2005
-
[3] A. R. Viski, R. M. C. Werlich, “Prototypes Of Monitoring Devices For Water Levels And Currents In Coastal Waters”, Journal of Coastal Research, ICS2011, Special Issue 64, 2011.
-
[4] Tuan Le Dinh, “Design and Deployment of a Remote Robust Sensor Network: Experiences from an Outdoor Water Quality Monitoring Network”, 32nd IEEE Conference on Local Computer Networks, 2007.
-
[5] Ivan Stoianov, “PIPENET: A Wireless Sensor Network for Pipeline Monitoring”, IPSN’07
-
[6] Andrew J. Whittle, “Waterwise@Sg: A Testbed For Continuous Monitoring Of The Water Distribution System In Singapore”, Water Distribution System Analysis 2010 – WDSA2010, Tucson, AZ, USA
-
[7] Ayob Johari, “Tank Water Level Monitoring System using GSM Network”, International Journal of Computer Science and Information Technologies 2011.
-
[8] Iqbal Singh, “Monitoring Water Level in Agriculture Using Sensor Nerwork”, International Journal of Soft Computing and Engineering (IJSCE) - 2011.
-
[9] Kalyan Mohan Goli, “Integration of Wireless Technologies for Suistanabe Agriculture”, International Journal of Computer Sci ence & Technology (IKST), Dec 2011
-
[10] Jirapon Sunkpho, “Real-time flood monitoring and warning system”, Songklanakarin J. Sci. Technol. 228 33 (2), 227-235, 201
Leveldatd sonar (cm)
Gambar 18. Distribusi Level Air pada MaxSonar
KESIMPULAN
Dari pemaparan telemetri pengukuran ketinggian air yang difokuskan dalam akuisisi data dari berbagai macam sensor ultrasonic, dapat disimpulkan bahwa:
-
1. Pengujian ultrasonic PING))) didapatkan hasil prosentase eror yaitu
-
a. Objek padat = 1.05%, Objek cair = 3.23%
-
b. Air Jernih = 1.25%m Air Jeruh = 1.26%
-
2. Pengujian ultrasonic SRF04 dengan kepercayaan data sebesar 80.86% serta disarankan pembacaan lebih besar dari 3Cm.
-
3. Pengujian ultrasonic MaxSonar didapatkan hasil lumayan bisa diandalkan dimana tingkat kepercayaan data yang didaptkan 90% serta disarankan pembacaan lebih besar dari 3Cm.
-
4. Pengujian dari ketiga sensor US yaitu SRF04, PING dan MaxSonar yang dilakukan secara intensif terhadap
130
ISBN: 978-602-7776-72-2 © Universitas Udayana2013
Discussion and feedback