Kendali Sudut Pitch dan Roll fase Lepas Landas pada Pesawat VTOL-plane
on
35
Majalah Ilmiah Teknologi Elektro, Vol. 21, No.1, Januari – Juni 2022 DOI: https://doi.org/10.24843/MITE.2022.v21i01.P06
Kendali Sudut Pitch dan Roll fase Lepas Landas pada Pesawat VTOL-plane
Jaka Persada Sembiring1, Farli Rossi2, Try Susanto3
[Submission: 14-12-2021, Accepted: 15-01-2022]
Abstract—VTOL-plane is a hybrid vehicle that combines a fixed-wing vehicle and a rotary-wing vehicle with the advantages of good endurance and good maneuverability. Combining these two types of UAVs requires a control system capable of stabilizing the shift from fixed-wing to rotary-wing mode or vice versa. Attitude disorientation occurs in the form of a decrease in height due to overshoot. therefore, a mode or control many input parameters. The Linear Quadratic Regulator (LQR) control method is one of the control methods capable of producing minimum errors and capable of many input parameters. The LQR control system produces a control response with a rise time according to the needs. The LQR control meets the specifications of the VTOL-plane vehicle requirements to handle minimum errors. Attitude disorientation occurs due to overshoot, as well as handling of the control system which can only handle a small amount of input and output on the VTOL-plane vehicle.
Intisari— Wahana VTOL-plane merupakan wahana hybrid yang menggabungkan wahana fixed-wing dan wahana rotary-wing dengan kelebihan endurance yang baik serta maneuver yang baik. Penggabungan dua jenis UAV ini memerlukan sistem kendali yang mampu menstabilkan perpindahan dari mode fixed-wing ke mode rotary-wing maupun sebaliknya. Terjadi disorientasi sikap berupa penurunan ketinggian disebabkan overshoot. oleh karena itu, kendali membutuhkan banyak parameter masukan. Metode kendali Linear Quadratic Regulator (LQR) salah satu metode kendali yang mampu menghasilkan kesalahan minimum dan mampu menangani banyak parameter masukan. Sistem kendali LQR menghasilkan respon kendali dengan nilai rise time sesuai kebutuhan. Kendali LQR telah memenuhi spesifikasi dari kebutuhan wahana VTOL-plane dalam menangani kesalahan minimum. Terjadinya disorientasi sikap disebabkan overshoot, serta penanganan sistem kendali yang hanya mampu menangani sedikit masukan dan keluaran pada wahana VTOL-plane.
Kata Kunci— Kendali, LQR, Overshoot, UAV.
-
I. pendahuluan
Unmanned Aerial Vehicle (UAV) dikenal sebagai pesawat atau wahana terbang tanpa awak yang terbang menggunakan gaya aerodinamik, baik secara mandiri (otonom) dengan bantuan autopilot atau dikemudikan dari jarak jauh [1]. Pesawat tanpa awak atau UAV banyak digunakan dalam kebutuhan militer dan sipil meliputi pemetaan, pengawasan daerah, dan fotografi udara [2]. Berdasarkan jenisnya, UAV diklasifikasikan menjadi empat yaitu sayap tetap (fixed-wing), sayap kepak (flapping-wing), balon udara (blimps) dan sayap putar (rotary-wing) [3].
Baru-baru ini telah dikembangkan teknologi UAV yang memiliki kemampuan daya tahan terbang yang baik, serta dapat lepas landas dan mendarat secara vertikal biasa disebut dengan istilah VTOL-plane [4]. VTOL-plane masuk kedalam kategori Hybrid atau konsep penggabungkan fixed-wing dan rotarywing dalam satu platform yang sama [5]. Konsep penggabungan ini memanfaatkan keunggulan dari masing-masing wahana untuk menyelesaikan sebuah misi penerbangan. Pada fase penerbangan, gaya maupun torsi yang mengendalikan gerak VTOL-plane saat terbang dihasilkan oleh gaya angkat (lift) dari sayap dan thrust yang dihasilkan motor brushless. Wahana VTOL-plane memiliki kemampuan terbang secara vertikal dengan memanfaatkan empat motor penggerak vertikal saat lepas landas dan mendarat, serta terbang horisontal (cruise) dengan memanfaatkan motor pendorong horisontal dengan bantuan kedua sayapnya. Penelusuran lintasan misi atau waypoint yang dilakukan wahana ini terbang lurus dengan mode fixed-wing dan transisi ke mode rotary-wing jika akan lepas landas. Oleh karena itu, wahana VTOL-plane ini ketika terbang harus dapat menstabilkan gerak pada tiap modenya baik ketika sedang menelusuri lintasan lurus maupun ketika lepas landas sehingga wahana tidak mengalami disorientasi sikap yang menyebabkan wahana bergeser dari lintasannya atau terjatuh.
Pengaruh sistem kendali diukur berdasarkan spesifikasi sistem kendali risetime, settling time, steady state error dan maksimum overshoot [6]. Kecepatan waktu respon pada sistem kendali sangat mempengaruhi fase transisi antar mode pada VTOL-plane, waktu respon yang lambat dapat mengakibatkan wahana jatuh [7] . Hal lain yang terjadi karena gangguan dari lingkungan sekitar. Gangguan tersebut menyebabkan wahana keluar dari lintasan terbang atau tidak stabilnya sikap orientasi. Semakin besar gangguan dapat mengakibatkan meningkatnya kesalahan pada saat menjalankan misi. Steady state error yang diperoleh juga akan semakin besar karena peningkatan kesalahan yang ada. Penanganan steady state error yang tidak
Jaka Persada Sembiring: Kendali sudut pitch dan ...
tepat dapat memicu munculnya multi overshoot atau overshoot yang berlebihan [5]. Multi overshoot dapat dikurangi dengan memperbesar nilai redaman. Namun, semakin besar nilai redaman yang digunakan dapat memperlambat waktu naik (rise time) sistem [7]. Steady state error dan multi overshoot yang tidak ditangani dengan baik dapat mengakibatkan wahana tersebut jatuh [9], sehingga diperlukan sebuah sistem kendali agar diperoleh kondisi yang optimal.
Penerapan metode kendali pada VTOL-plane sangat penting, dimana konsep penggabungan rotary-wing dan fixed-wing untuk pengendalian sudut pitch dan roll membutuhkan masukan kendali yang dapat menampung banyak parameter kendali.
LQR + MIMO merupakan sebuah metode kendali yang dapat mengolah banyak masukan dan menghasilkan banyak keluaran serta kendali optimal yang bertujuan membawa state akhir ke titik nol dengan meminimalkan cost function [5], yaitu waktu integral dari bentuk kuadratis pada vektor keadaan x dan vektor masukan u. Sistem Kendali LQR memiliki kemampuan untuk menghasilkan sistem kendali yang memiliki sifat regulator (memaksa sinyal kendali menuju ke nilai 0), sehingga menjadikan wahana dapat menstabilkan sikap ketika melakukan ada fase penerbangan dengan baik melalui respon cepat sistem. LQR bekerja secara Multiple Input Multiple Output (MIMO) menggunakan state space sebagai representasi model sistem. Untuk memenuhi kebutuhan sistem kendali yang dapat mengendalikan respon secara cepat, overshoot yang minim dan parameter yang banyak untuk menghindari disorientasi sikap atau stall, serta penurunan wahana yang tiba-tiba dengan menerapkan kendali LQR.
Berdasarkan latar belakang yang telah dijelaskan diatas, mendorong penulis untuk merancang kendali yang mampu menjaga kestabilan wahana ketika terbang.
-
II. Metode Penelitian
-
A. Kendali Linear Quadratic Regulator (LQR)
Optimasi sudah menjadi salah satu yang lazim digunakan saat ini, ketika bekerja kita diharapkan memanfaatkan waktu secara optimal dengan menggunakan sumber daya yang optimal, apalagi berkaitan dengan pengontrolan sistem. Salah satu metode kontrol yang bisa memanfaatkan waktu secara optimal dan robust yaitu metode Linear Quadratic Regulator (LQR). Metode kendali LQR merupakan salah satu metode kendali modern yang mampu menangani banyak masukan serta banyak keluaran atau sering disebut juga sebagai Multiple Input Multiple Output (MIMO). Selain itu, metode kendali modern ini dapat menangani sistem yang linier maupun sistem yang tidak linier [6].
Metode LQR disebut linear karena model dan bentuk kontrolernya berupa linear dan disebut kuadratik karena cost function-nya adalah berupa kuadratik, sedangkan disebut regulator karena referensinya bukanlah berupa fungsi waktu [2]. B. Rancangan Sistem Kendali
Rancangan model sistem kendali dilakukan agar VTOL-Plane dapat mempertahankan keseimbangan gerak rotasi pada saat melakukan. Rancangan umum dari sistem kendali ditunjukkan pada Gambar 1. Sistem kendali secara umum, yang terdiri dari bagian umum dari sebuah kendali. Metode LQR digunakan untuk menentukan nilai dari matriks K yang
merupakan gain full state feedback dari sistem kendali yang dibuat.
Sistem kendali menggunakan 10 buah state sabagai acuan dasar parameter kendali. 10 state tersebut terdiri dari posisi translasi x, kecepatan translasi x (vx), posisi translasi y, kecepatan translasi y (vy), posisi translasi z, kecepatan translasi z (vz), sudut roll (ϕ), kecepatan sudut roll (p), Sudut pitch (θ) dan kecepatan sudut pitch (q).
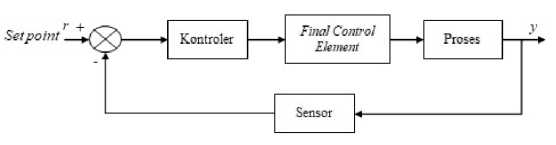
Gambar 1. Diagram Blok Sistem Kendali
C. Pemodelan Wahana VTOL-plane
Penentuan Model wahana VTOL-plane ditentukan dari beberapa persamaan yang diturunkan menjadi model persamaan turunan final element. Sebelumnya, dilakukan perhitungan massa dan bentuk ukuran wahana untuk dimasukan kedalam tabel perhitungan inersia. Sehingga pemodelan yang dilakukan bisa di uji dengan cara simulasi terlebih dahulu menggunakan sotware Matlab simulink. Adapun nilai ukuran spesifikasi model wahana VTOL-plane pada tabel 1.
Tabel 1 Spesifikasi Model Wahana VTOL-plane
|
No |
Nama Bagian |
Dimensi |
|
1 |
Wing Span |
122,5 cm |
|
2 |
Root Chord |
47,8 cm |
|
3 |
Tip Chord |
18,2 cm |
|
4 |
Sweep |
38 cm |
|
5 |
Wing Area |
3981,25 cm2 |
|
6 |
Arm Copter sumbu x |
60 cm |
|
7 |
Arm Copter sumbu y |
51 cm |
|
8 |
Berat |
2,325 kg |
|
9 |
Stall Speed |
9,6 m/s |
Wahana VTOL-Plane yang digunakan pada penelitian ini menggunakan konfigurasi berjenis flywing memiliki sayap yang menyatu dengan fuselage. Terbuat dari bahan polyfoam dengan dimensi ukuran 122.5 cm untuk bentang sayap atau wingspan dan berat 2.325 kg.
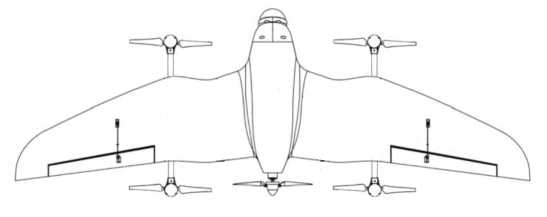
Gambar 2.Model Wahana VTOL-plane
Terdapat empat buah motor brushless sebagai pemberi gaya dorong vertikal (vertical thrust) dan sebuah motor brushless sebagai pemberi gaya dorong horisontal (horizontal thrust).
DOI: https://doi.org/10.24843/MITE.2022.v21i01.P06
-
III. MODEL SISTEM
-
A. Spesifikasi Sistem
Rangka mekanik flywing menggunakan bahan dasar polyfoam untuk bagian fin, sayap, dan badan pesawat serta alumunium sebagai lengan copter. Pesawat memiliki Motor brushless diletakkan pada bagian belakang dari pesawat. Board shield, baterai, ESC, receiver dan telemetri diletakkan sedemikian rupa agar pesawat dalam kondisi (Center of Gravity) CoG yang setimbang. Peletakan sebagian besar komponen pada bagian CoG bertujuan agar pesawat dapat terbang dengan lebih stabil tanpa adanya gangguan internal yang terjadi. Mekanik VTOL-plane secara keseluruhan dapat ditunjukan pada Gambar 3.
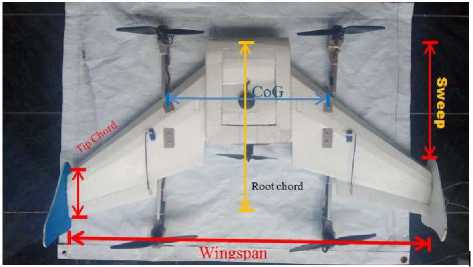
Gambar 3. Wahana VTOL-plane
-
B. Persamaan Gerak Wahana Terbang
Pada Persamaan gerak wahana terbang. Jika diasumsikan dengan koordinat sistem berada pada pusat gravitsi wahana, sehingga dihasilkan model berdasarkan kinetika badan wahana yang kaku (rigid body). Dalam penerbangannya, wahana terbang mengalami gaya dan torsi yang persamaannya (1) , (2) dan (3) dapat dituliskan menjadi persamaan (4) , (5) dan (6) (Fossen, 2011).
m^V + Ur - Wp - g cos(θ)sin(φ)) ^ = Y
m^W + Vp - qU - gcos(θ)cos(φ))^ = Z
•
Persamaan tersebut dapat diturunkan menjadi berbagai model wahana terbang seperti fixed-wing maupun quadrotor. Model wahana terbang di atas akan sangat bermanfaat untuk diturunkan menjadi state space sehingga simulasi sistem kendali dapat dilaksanakan.
Jaka Persada Sembiring: Kendali sudut pitch dan ...
-
C. Simulasi Sistem Kendali
Simulasi kendali ada gerak rotasi dilakukan untuk mendapatkan respon sistem kendali LQR pada VTOL-plane saat bergerak rotasi yang berupa overshoot, settling time dan steady-state error. Pada simulasi ini, nilai matriks Q akan diatur hingga didapatkan nilai feedback gain K yang menghasilkan respon sistem sesuai dengan spesifikasi yang diinginkan. Melalui simulasi yang telah dilakukan, maka didapatkan nilai feedback gain K yang akan dimasukkan ke program mikrokontroler untuk diuji langsung. Nilai 10 state translasi rotasi yang digunakan untuk kendali LQR didapatkan dari pembacaan sensor IMU, barometer, dan GPS. Kode program sistem kendali LQR dapat dilihat pada Gambar 4.
|
double |
κts][io] ={ | |||||
|
{‰∙¾ |
Kfx |
l7χ5 o, θ5 |
o, o, 0, |
O5 |
O5 |
0}, |
|
{ 0, |
o, |
Kpr. z, Kpr. v7, 0, 0, 0, |
O5 |
o, |
Oh | |
|
{ o; |
o, |
o, 0, |
K roll, K ^x, 0, |
o, |
O5 |
oh |
|
{ 0, |
o. |
0, o, |
0, 0, K pitch, K gy, |
0, |
«L | |
|
{ 0, |
o> |
o, o, |
0, 0, o, |
O5 |
^_yaw, K gz} }; | |
Gambar 4. Deklarasi variabel K yang digunakan
-
IV. HASIL DAN PEMBAHASAN
Pengujian anti-rotasi pada sudut roll terlebih dahulu dimulai dengan simulasi. Simulasi dilakukan dengan memberikan variasi pembobotan nilai Q untuk penalaan anti-roll berupa Qφ dan Q untuk penalaan pada kecepatan sudut roll adalah Q_p. Variasi nilai Q tersebut akan menghasilkan nilai full state feedback gain K yaitu K_ϕ.τ_ϕ dan K_p.τ_ϕ untuk kendali anti-roll. Pembobotan nilai Q diawali dengan nilai Q sebesar 1 lalu ditambah atau dikurangi hingga didapatkan respon sistem yang sesuai dengan spesifikasi kebutuhan.
Penalaan nilai Qφ untuk kendali anti-roll yang memenuhi parameter spesifikasi sistem adalah nilai penalaan terbaik yang akan ditanamkan pada mikrokontroller untuk pengujian dengan flight-test. Variasi penalaan bertujuan agar orientasi roll dari pesawat VTOL-plane mendekati nilai nol derajat dengan rise time yang cepat.
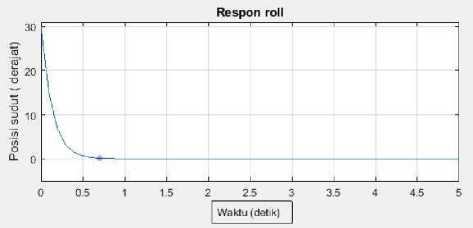
Gambar 5. Hasil Uji Sudut Roll denga Matlab
Hasil penalaan dengan menggunakan nilai Qφ sebesar 65 ditunjukkan pada Gambar 5. Pada hasil simulasi tersebut, ketika sistem diberi gangguan sebesar 300 nilai rise time yang dihasilkan pada sudut roll sebesar 0,7 detik. Nilai tersebut menunjukkan bahwa nilai Qφ sebesar 65 telah memenuhi dari parameter spesifikasi sistem dalam penelitian ini yaitu kurang dari 1 detik. Kemudian dilakukan validasi dilapangan dengan melakukan uji terbang terhadap wahana, Untuk melihat resopn
kendali dari sistem yang sudah dilakukan pengujian secara simulasi.
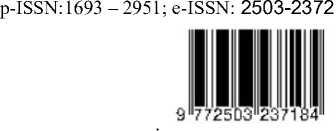
Gambar 6. Hasil Uji Validasi dilapangan Sudut Roll
Hasil pengujian pada sudut roll pengujian langsung dilapangan pada wahana tersebut menunjukkan nilai rise time sudah sesuai yaitu sebesar 0,5 detik dan sudah sesuai dengan spesifikasi kebutuhan, hal ini ditandai dengan overshoot yang tidak melebihi toleransi yaitu 50.
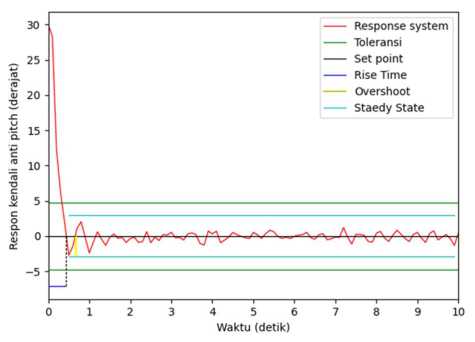
Pada pengujian dilapangan atau flight test, mode stabilize sudut pitch dengan nilai Q_θ sebesar 80 menunjukkan rise time yang diperoleh sebesar 0,5 detik pada saat diberi gangguan sebesar 30 derajat.
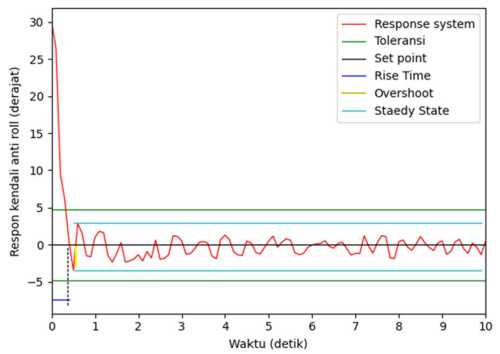
Gambar 7. Hasil Uji Sudut Pitch dengan Matlab
Hasil simulasi respon anti-rotasi pada sudut pitch yang optimal untuk memenuhi paramater spesifikasi sistem pada penelitian ini adalah dengan nilai Q_θ sebesar 80 yang ditunjukkan pada Gambar 7. Rise time pada kecepatan sudut pitch menunjukkan nilai sebesar 0,5 detik untuk menuju nilai nol derajat setelah diberi gangguan sebesar 30 derajat.
Pada pengujian dilapangan atau flight test, mode stabilize sudut pitch dengan nilai Qθ sebesar 80 menunjukkan rise time yang diperoleh sebesar 0,5 detik pada saat diberi gangguan sebesar 300. Nilai rise time tersebut sesuai dengan hasil simulasi dan masih memenuhi parameter spesifikasi sistem.
Gambar 8. Hasil Uji Validasi dilapangan Sudut Pitch
Hasil simulasi dan hasil validasi berbeda dikarenakan dalam pemodelan sistem untuk simulasi tidak dimungkinkan untuk memodelkan gangguan berupa hembusan angin, oleh karena itu hasil simulasi merupakan data wahana ketika terbang dan tidak adanya gangguan, akan tetapi dalam validasi di lapangan, wahana mendapati gangguan berupa hembusan angin yang datang. Gangguan yang terjadi tidak terlalu besar, sehingga wahana masih mampu mengendalikan sudut roll dan pitch-nya.
Respon transien sering digunakan untuk menganalisis performa karakter dari suatu sistem kendali. Respon transien yang digunakan biasanya menggunakan unit step dengan kondisi awal pada kondisi nol atau diam. Hal tersebut dilakukan guna mempermudah pengamatan dan perhitungan dalam analisis respon transien yang dihasilkan oleh sistem tersebut. Beberapa respon transien yang digunakan antara lain yaitu:
-
1. Delay time (td) merupakan waktu yang dibutuhkan sistem untuk pertama kali merespon hingga mencapai setengah dari nilai yang menjadi acuan atau nilai akhir sistem.
-
2. Rise time (tr) merupakan waktu yang dibutuhkan sistem untuk merespon dari nilai 10% hingga 90%,
5% hingga 95% atau 0% hingga 100% nilai akhir sistem. Nilai rise time dapat dicari menggunakan persamaan (7)

-
3. Peak time (tp) merupakan waktu yang dibutuhkan sistem untuk mencapai nilai tertinggi pada overshoot pertama.
-
4. Maximum overshoot (Mp) adalah nilai maksimal yang dihasilkan dari nilai respon sistem yang diselisihkan dengan nilai akhir yang diinginkan pada sistem dan disajikan dalam bentuk persentase. Overshoot maksimum didapatkan ketika respon sistem berada pada nilai tertinggi dan dihitung dalam persen terhadap setpoint.
Tabel 2. Hasil Uji Coba Sudut Roll
Hasil kendali roll
DOI: https://doi.org/10.24843/MITE.2022.v21i01.P06
|
Respon Transien |
Uji Q 65 |
Uji Q 80 |
Uji Q 100 |
Nilai Terkecil |
Spesifikasi minimum kebutuhan |
|
Rise Time (tr) |
0,4 detik |
0,5 detik |
0,5 detik |
0,43 detik |
< 1 detik |
|
Settling time |
0,8 detik |
0,1 detik |
1 detik |
0,8 detik |
< 2 detik |
|
Overshoot |
-3,56 0 |
-4,390 |
-5,42 0 |
-3,420 |
< 50 |
|
Steady state error |
-1,440 |
-1,840 |
-1,740 |
-1,620 |
± 2,50 |
|
Tabel 3. Hasil Uji Coba Sudut pitch | |||||
|
Respon Transien |
Hasil kendali pitch |
Nilai Terkecil |
Spesifikasi minimum kebutuhan | ||
|
Uji Q 65 |
Uji Q 80 |
Uji Q 100 | |||
|
Rise Time (tr) |
0,4 detik |
0,5 detik |
0,4 detik |
0,43 detik |
< 1 detik |
|
Settling time |
0,9 detik |
0,9 detik |
1 detik |
0,9 detik |
< 2 detik |
|
Overshoot |
-5,4 0 |
-3,12 0 |
-4,32 0 |
-3,120 |
< 50 |
|
Steady state error |
-2,440 |
-1,840 |
-3,740 |
-1,840 |
± 2,50 |
Instrumentation Systems), [Online] 7 (1), 49, tersedia di DOI:10.22146/ijeis.15262.
-
[6] Ogata, K., 2010, Modern control engineering, Prentice-Hall electrical engineering series. Instrumentation and controls series, 5th ed, PrenticeHall, Boston.
-
[7] Ahmad Ashari, Andi Dharmawan, Hafizna Arsyil Fadhli dan Ariesta Martiningtyas Handayani, 2019, Flight Trajectory Control System on Fixed Wing UAV using Linear Quadratic Regulator, International Journal of Engineering Research and, [Online] V8 (08), IJERTV8IS080135, tersedia di DOI:10.17577/IJERTV8IS080135.
-
[8] Gu, H., Lyu, X., Li, Z., Shen, S. dan Zhang, F., 2017, Development and experimental verification of a hybrid vertical take-off and landing (VTOL) unmanned aerial vehicle(UAV), 2017 International Conference on Unmanned Aircraft Systems (ICUAS), [Online], Juni 2017 IEEE, Miami, FL, USA., hlm. 160–169, tersedia di DOI:10.1109/ICUAS.2017.7991420, diakses 6 Januari 2021.
-
[9] Zakaria, A.B. dan Dharmawan, A., 2017, Sistem Kendali Penghindar Rintangan Pada Quadrotor Menggunakan Konsep Linear Quadratic, IJEIS (Indonesian Journal of Electronics and Instrumentation Systems), [Online] 7 (2), 219, tersedia di DOI:10.22146/ijeis.25503.
Hasil simulasi dan hasil validasi berbeda dikarenakan dalam pemodelan sistem untuk simulasi tidak dimungkinkan untuk memodelkan gangguan berupa hembusan angin, oleh karena itu hasil simulasi merupakan data wahana ketika terbang dan tidak adanya gangguan, akan tetapi dalam validasi di lapangan, wahana mendapati gangguan berupa hembusan angin yang datang. Gangguan yang terjadi tidak terlalu besar, sehingga wahana masih mampu mengendalikan sudut roll-nya.
-
V. Kesimpulan
Hasil pengujian respon kendali anti-rotasi dalam mempertahankan kestabilan gerak translasi saat fase lepas landas menggunakan kendali LQR telah mampu meredam overshoot kurang dari 10 derajat.
Ucapan Terima Kasih
Penelitian ini di danai oleh Universitas Teknokrat Indonesia melalui dana hibah internal sesuai dengan kontrak penelitian tahun anggaran 2021.
Referensi
-
[1] Euteneuer, E. dan Papageorgiou, G., 2011, UAS insertion into commercial airspace: Europe and US standards perspective, 2011 IEEE/AIAA 30th Digital Avionics Systems Conference, 5C5-1-5C5-12,
-
[2] García Carrillo, R.L., 2013, Quad Rotorcraft Control, Quad Rotorcraft Control, Advances in Industrial Control, 1 edisi, [Online], SpringerVerlag London., hlm. XIX, 179, tersedia di https://www.springer.com/gp/book/9781447143987.
-
[3] Balas, C., 2007, Modelling and Linear Control of a Quadrotor, 150,
-
[4] Zhang, J., Guo, Z. dan Wu, L., 2017, Research on control scheme of
vertical take-off and landing fixed-wing UAV, 2017 2nd Asia-Pacific Conference on Intelligent Robot Systems (ACIRS), [Online], Juni 2017 IEEE, Wuhan, China., hlm. 200–204, tersedia di DOI:10.1109/ACIRS.2017.7986093, diakses 3 Mei 2019.
-
[5] Dharmawan, A. dan Arismawan, I.F., 2017, Sistem Kendali Penerbangan Quadrotor pada Keadaan Melayang dengan Metode LQR dan Kalman Filter, IJEIS (Indonesian Journal of Electronics and
Jaka Persada Sembiring: Kendali sudut pitch dan ...
{ Halaman ini sengaja dikosongkan }
ISSN 1693 – 2951
Jaka Persada Sembiring: Kendali sudut pitch dan ...
Discussion and feedback