Rancang Bangun Pemandu Tuna Netra Menggunakan Sensor Ultrasonik Berbasis Mikrokontroler
on
Teknologi Elektro, Vol. 16, No. 3,September - Desember 2017
27
Rancang Bangun Pemandu Tuna Netra Menggunakan Sensor Ultrasonik Berbasis Mikrokontroler
Muhammad Namiruddin Al-Hasan1, Cok Indra Partha2, Yoga Divayana3
Abstract— People with eye-disabilty have limited physical condition and make them using a stick as a tool guide for daily activities. Technology help people with eye-disabilty replace stick with tool guide using ultrasonic sensors to move more freely. Ultrasonic sensor works by using ultrasonic waves as a transmitter and calculate the distance using diffrence time lapse. Sensitivity of this sensor is from 2 cm to 200 cm. Microcontoroller Arduino UNO can be used as data processing and vibrating motors as output. Tool guide for blind people use the belt as the main design. Sensors placed on the left side, front, and right belt to detect objects in front of sensors. Vibrating motors placed at the side of the sensor to provide vibration when the ultrasonic sensors active. Tool guides for blind people have specialized in detecting obstacle 30 cm in the left belt, 150 cm in front of the belt, 30 cm in right belt 30 cm, and 120 cm – 125 cm under the belt.
Intisari— Penyandang tuna netra memiliki kondisi fisik yang terbatas. Kondisi fisik ini membuat penyandang menggunakan tongkat sebagai alat pemandu dalam kegiatan sehari-hari. Kemajuan teknologi membantu penyandang mengganti tongkat dengan alat pemandu menggunakan sensor ultrasonik sehingga lebih leluasa bergerak. Sensor ultrasonik bekerja dengan memanfaatkan gelombang ultrasonik sebagai pemancar dan menghitung jarak dengan perbedaan selisih waktu. Kepekaan sensor ultrasonik dari 2 cm sampai 200 cm. Pengolah data yang digunakan adalah mikrokontroler arduino dan keluaran berupa motor getar. Alat pemandu tuna netra menggunakan sabuk sebagai desain utama. Sensor diletakkan pada sisi kiri, depan, dan kanan sabuk untuk mendeteksi benda yang berada pada jarak pantulan sensor. Motor getar diletakkan pada samping sensor untuk memberikan getaran ketika sensor ultrasonik aktif. Alat pemandu tuna netra mempunyai spesifikasi dalam mendeteksi jarak 30 cm di kiri sabuk, 150 cm di depan sabuk, 30 cm di kanan sabuk dan 120 cm – 125 cm di bawah sabuk.
Kata Kunci—sensor ultrasonik, Mikrokontroler Arduino, motor getar, jarak.
-
I. pendahuluan
Tuna netra merupakan kondisi pada mata sehingga tidak berfungsi dengan baik. Penyandang tuna netra menggunakan tongkat sebagai penunjuk arah untuk mengetahui keadaan di sekitarnya. Menggunakan tongkat berarti kurangnya fleksibilitas bagi tuna netra. Diharapkan dengan adanya alat bantu sabuk pemandu tuna netra, penyandang bisa lebih leluasa bergerak.
Pada penelitian sebelumnya telah dibuat alat pemandu tuna netra menggunakan sensor ultrasonik berbasis mikrokontroler Arduino. Penelitian ini menggunakan tongkat pemandu sebagai melekatnya sensor sehingga pengguna dapat mengetahui benda di sekitarnya[1]. Akan tetapi dengan menggunakan tongkat sebagai melekatnya sensor, ruang gerak pengguna masih terbatas.
Penelitian kali ini menggunakan sabuk sebagai pengganti tongkat untuk memandu tuna netra. Alat yang dibuat menggunakan sensor ultrasonik sebagai input, data dikelola pada mikrokontroler Arduino dan keluarannya berupa getaran dihasilkan dari motor getar DC.
-
II. Kajian Pustaka
-
A. Penyandang Tuna netra
Tuna netra adalah kondisi dimana mata pada manusia tidak normal. Kondisi mata yang tidak normal adalah ketika benda yang ditangkap oleh mata tidak dapat diteruskan oleh kornea, lensa mata, retina dan ke syaraf. Hal seperti ini bisa disebabkan oleh beberapa hal seperti faktor keturunan, kecelakaan atau suatu penyakit. Penderita tuna netra untuk mempersepsikan suatu lingkunngannya menggunakan indera indera yang lain atau biasa menggunakan tongkat sebagai penunjuk arah.
-
B. Sensor Ultrasonik
Sensor Ultrasonik ialah sensor dengan prinsip kerja menggunakan pantulan gelombang untuk mengetaui jarak benda yang ada dalam frekuensianya. Sensor Ultrasonik menggunakan gelombang ultrasonic yang dapat merambat dalam medium padat, cair dan gas. Prinsip kerjanya yaitu pemancar gelombang akan mengirimkan sinyal kemudian diukur waktu yang dibutuhkan sampai pada datangnya pantulan objek[2].

Gambar 1: Sensor ultrasonik
Sensor menggunakan sonar untuk menentukan jarak terhadap suatu objek[3]. Sensor yang digunakan berjumlah empat buah, yakni satu di depan, masing – masing di kanan dan kiri dan satu lagi di bagian bawah. Sensor pada bagian bawah sengaja ditambahkan untuk mempermudah pengguna apakah ada lubang dan bisa juga digunakan untuk menuruni tangga.
-
C. Mikrokontroler Arduino
Muhammad Namiruddin Al-Hasan: Rancang Bangun Pemandu Tuna…
p-ISSN:1693 – 2951; e-ISSN: 2503-2372

Mikrokontroler Arduino bersifat open source untuk pengendali mikro single board, sehingga memudahkan pengguna elektronik dalam berbagai bidang. Perangkat keras Arduino memiliki prosesor Atmel AVR yang bisa diprogram menggunakan komputer dan perangkat lunaknya memiliki bahasa pemograman IDE[4]. Tujuan menanamkan program supaya rangkaian elektronik dapat membaca input, memprosesnya kemudian menghasilkan output seperti yang diinginkan. Penelitian ini menggunakan mikrokontroler arduino sebagai pengolah data dari input berupa sensor ultrasonik. Pin yang digunakan adalah pin digital Input dan pada keluarannya menggunakan motor DC memakai pin digital Output.
-
D. Motor getar DC
Motor getar DC merupakan komponen elektronika yang berfungsi memberikan getaran sebagai output. Pada penelitian ini motor DC digunakan sebagai keluaran ketika sensor ultrasonik aktif. Jenis motor getar DC yang digunakan adalah 304-108 empat milimeter. Motor getar DC ini memiliki tegangan 3V, arus 90 mA, beban inersia 100g, getaran Amplitudo 0,6 G dan tahanan insulasi 10 Mohm[5].

Gambar 2: Motor getar DC
-
III. metode penelitian
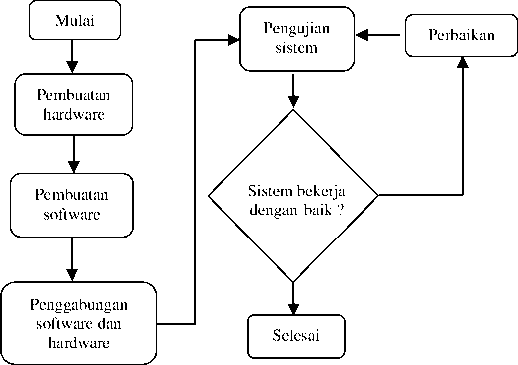
Perancangan diagram alir dari alat pemandu tuna netra menggunakan sensor ultrasonik digunakan sebagai pedoman langkah – langkah yang akan dilakukan dalam penelitian. Diagram alir penelitian ditunjukkan pada gambar 3.
arduino yaitu terdiri dari 4 bagian yaitu perancangan power suplay, perancangan rangkaian input sensor, perancangan rangkaian output sensor dan perancangan mikrokontroler sebagai pengolah data untuk input dan output. Pembuatan hardware keseluruhan dapat dilihat pada gambar 4.
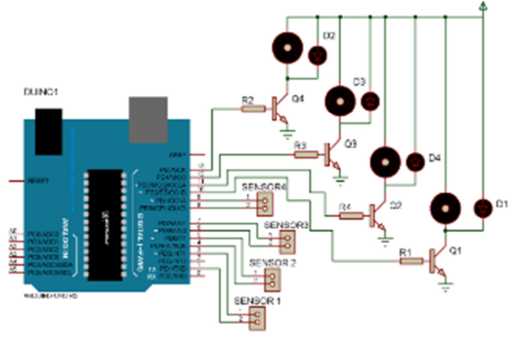
Gambar 4: Perancangan rangkaian hardware
-
B. Pembuatan software
Pembuatan perangkat lunak pada alat pemandu tuna netra menggunakan platfrom arduino IDE 1.6.9 yang sudah disediakan oleh manufaktur dan dapat di dwonload secara bebas melalui website arduino. Diagram alir dari alat pemandu tuna netra menggunakan sensor ultrasonik digunakan sebagai pedoman langkah – langkah yang akan dilakukan dalam pembuatan perangkat lunak ditunjukkan pada gambar 5.
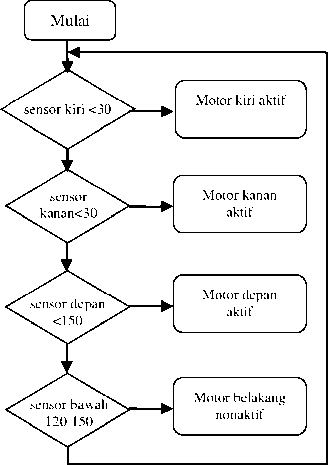
Gambar 5: Diagram alir pembuatan perangkat lunak
Gambar 3: Diagram alir penelitian alat pemandu tuna netra
A. Pembuatan hardware
Pembuatan perangkat keras pada alat pemandu tuna netra menggunakan sensor ultrasonik berbasis mikrokontroler
-
C. Gambaran umum perancangan sistem
Dalam melakukan perancangan sistem alat pemandu tuna netra dapat dilakukan dengan membuat desain dari alat tersebut menggunakan sabuk. Lingkungan dalam pengujian
Teknologi Elektro, Vol. 16, No. 3,September - Desember 2017 alat pemandu tuna netra dilakukan di Laboratorium Teknik Elektro Universitas Udayana. Secara umum perancangan sistem alat pemandu tuna netra ditunjukkan pada gambar 6.
= Sensor HCSR-04
getar DC
= Motor
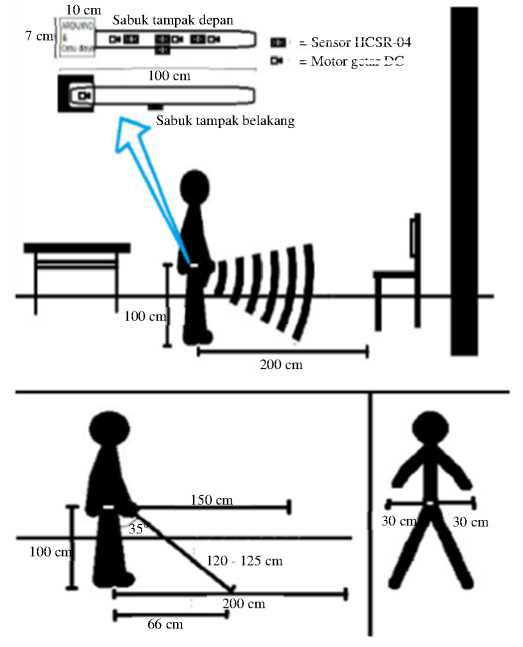
Gambar 6: Gambaran umum perancangan sistem
Penjelasan dari perancangan sistem pada gambar 6 yaitu, penyandang tuna netra menggunakan sabuk pada sebuah ruangan yang tedapat beberapa halangan seperti meja, kursi dan dinding. Sabuk yang digunakan terdapat empat sensor HCSR-04 dan motor getar DC dan kepala sabuk digunakan untuk meletakkan arduino UNO dan rangkaian power supply. Cara pemasangan sabuk terbalik, sehingga kepala sabuk berada di belakang pinggangdan tengah sabuk yang terdapat dua sensor berada di depan pinggang. Sabuk dipasang dengan ketinggian 100 cm dari kaki. Sensor ke empat yang berada didepan pinggan diarahkan ke bawah dengan sudut 350 sehingga dapat mendeteksi halangan yang berada di bawah seperti tangga, tanjakan dan lubang. Sensor kiri dan kanan mendeteksi halangan ketika berjarak 30 cm dari pinggang penyandang tuna netra dan sonsor depan mendeteksi halangan ketika berjarak 150 cm dari pinggang penyandang tuna netra, sedangkan jarak maksimum yang dapat diukur oleh setiap masing-masing sensor adalah 200 cm.
-
IV. HASIL DAN PEMBAHASAN
-
A. Realisasi Hasil Perancangan
Realisasi perancangan alat pemandu tuna netra menggunakan sensor ultrasonik berbasis mikrokontroler ditunjukkan pada gambar 7 dan gambar 8. Pada gambar 7
29 menunjukkan alat pemandu tampak depan yang tediri dari motor kanan, sensor kanan, motor depan, sensor depan, sensor bawah, sensor kiri, motor kiri, arduino UNO dan power supply.
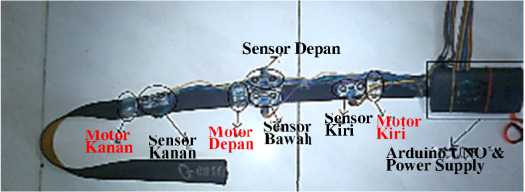
Gambar 7: Realisasi alat pemandu tuna netra tampak depan

Gambar 8: Realisasi alat pemandu tuna netra tampak belakang
Gambar 8 menunjukkan alat pemandu tampak belakang terdapat motor bawah yang bekerja ketika sensor bawah aktif. Alat pemandu tuna netra mempunyai spesifikasi yang ditunjukkan pada tabel I.
TABEL I: SPESIFIKASI ALAT PEMANDU TUNA NETRA
|
No |
Spesifikasi |
Keterangan |
|
1 |
Catu Daya |
9V |
|
2 |
Masukan |
4 buah sensor ultrasonik HCSR-04 |
|
3 |
Keluaran |
4 buah motor getar DC |
|
4 |
Prosesor |
Modul Arduino UNO |
|
5 |
Dimensi |
100 cm X 7 cm |
-
B. Pengujian rangkaian power supply
Pengujian rangkaian power supply dilakukan dengan merangkai power supply dan alat ke digital multi fungsi meter DC untuk menampilkan konsumsi daya yang diperlukan pada alat pemandu tuna netra seperti pada gambar 9.
Gambar 9: blok diagram pengujian rangkaian power supply
Keadaan siaga alat pemandu merupakan keadaan dimana rangkaian sensor dan rangkaian pengolah data bekerja tetapi belum memberikan keluaran ke rangkaian output. Dalam keadaan siaga ini konsumsi daya yang diperlukan alat pemandu ditunjukkan pada gambar 10(a). Keadaan beroperasi alat pemandu ditunjukkan ketika semua rangkaian bekerja.
Muhammad Namiruddin Al-Hasan: Rancang Bangun Pemandu Tuna…
p-ISSN:1693 – 2951; e-ISSN: 2503-2372
Konsumsi daya pada saat alat pemadu ketika keadaan beroperasi maksimal ditunjukkan pada gambar 10(b).
(a) (b)
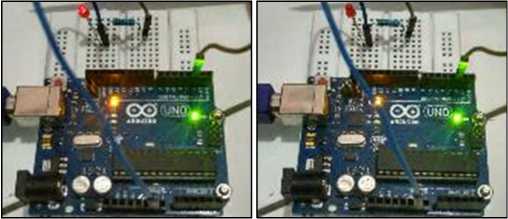
Gambar 12: rangkaian penguji pengolah data dengan LED (a) menyala (b) mati

(a) (b)
Gambar 10: konsumsi daya rangkaian power supply (a) Siaga (b) beroperasi
-
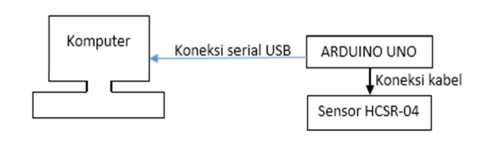
C. Pengujian rangkaian pengolah data
Pengujian rangkaian pengolah data yaitu menghubungkan kabel USB dari komputer ke arduino UNO untuk memberikan sumber tenaga dan pemrograman. LED terhubung ke arduino menggunakan koneksi kabel untuk melihat keluaran dari arduino berfungsi dengan baik atau tidak. Pengujian dapat dilakukan dengan melihat blok diagram pada gambar 11.

Gambar 11: blok diagram pengujian rangkaian pengolah data
Pengujian dengan memberikan logika high dan logika low pada pin-pin arduino dan mendeteksi apakan pin memberikan keluaran yang benar terhadap LED. Hasil pengujian rangkaian pengolah data ditunjukkan pada tabel II.
TABEL II: HASIL PENGUJIAN RANGKAIAN PENGOLAH DATA
|
No |
Nama Pin |
Hasil Pengujian | |
|
LOW |
HIGH | ||
|
1 |
Pin 2 |
Led Off |
Led On |
|
2 |
Pin 3 |
Led Off |
Led On |
|
3 |
Pin 4 |
Led Off |
Led On |
|
4 |
Pin 5 |
Led Off |
Led On |
|
5 |
Pin 6 |
Led Off |
Led On |
|
6 |
Pin 7 |
Led Off |
Led On |
|
7 |
Pin 8 |
Led Off |
Led On |
|
8 |
Pin 9 |
Led Off |
Led On |
|
9 |
Pin 10 |
Led Off |
Led On |
|
10 |
Pin 11 |
Led Off |
Led On |
|
11 |
Pin 12 |
Led Off |
Led On |
|
12 |
Pin 13 |
Led Off |
Led On |
LED yang diberikan logika LOW akan mati dan LED yang diberikan logika HIGH akan menyala. Rangkaian dari pengujian pengolah data dapat dilihat pada gambar 12(a) ketika LED menyala dan dambar 12(b) ketika LED mati.
-
D. Pengujian rangkaian input
Pengujian rangkaian input dapat dilakukan dengan memberikan program pada arduino dari komputer. Kemudian arduino dihubungkan ke input berupa sensor ultrasonik. Pada saat arduino dijalankan sensor akan bekerja mendeteksi halangan yang berada di depan dan membandingkannya dengan serial monitor yang berada di komputer. Pengujian rangkaian input ditunjukkan pada blok diagram gambar 13.
Gambar 13: blok diagram pengujian rangkaian input
Program untuk menguji rangkaian input menggunakan koding. Koding ini bertujuan untuk mendeteksi jarak halangan yang berada di depan sensor dari 2 cm sampai 200 cm. Koding pengujian rangkaian input adalah sebagai berikut:
#include <NewPing.h>
#define TRIGGER_PIN 2
#define ECHO_PIN 3
#define MAX_DISTANCE 200
NewPing sonar(TRIGGER_PIN, ECHO_PIN,
MAX_DISTANCE);
void setup() {
Serial.begin(115200);
}
void loop() { delay(50); int uS = sonar.ping(); Serial.print("Ping: ");
Serial.print(uS / US_ROUNDTRIP_CM);
Serial.print("cm");
}
Hasil dari pengujian rangkaian input untuk pengukuran jarak yang sebenarnya dengan jarak yang dideteksi oleh serial monitor mempunyai perbedaan yang sedikit. Perbedaan antara hasil pengukuran dengan jarak yang sesungguhnya hanya 1 cm dan tidak mempengaruhi kinerja alat pemandu tuna netra, sehingga rangkaian input mempunyai ketelitian yang baik. Gambar 14(a) menunjukkan bahwa jarak yang sesungguhnya benda dengan sensor dan gambar 14 (b) menunjukkan jarak yang dideteksi melalui serial monitor.

(a)
Ping: 40ca
Ping: 40c®
Ping: 40c®
Ping: 40cn
(b)
Gambar 14: Hasil pengujian rangkaian input (a) jarak yang sesungguhnya (b) jarak yang dideteksi oleh rangkaian
Rangkaian input terdiri dari empat sensor S1, S2, S3 dan S4. Pengujian rangkaian input pada setiap sensor mengambil 4 sampel jarak yaitu pada jarak 40 cm, 80 cm, 160 cm, dan 200 cm. Hasil pengukuran dari setiap sensor ultrasonik HC-SR04 ditunjukkan pada tabel III.
TABEL III: HASIL PENGUJIAN RANGKAIAN INPUT
|
No |
Nama Sensor |
Hasil Pengukuran | |||
|
40 cm |
80 cm |
160 cm |
200 cm | ||
|
1 |
Sensor 1 (S1) |
40 cm |
80 cm |
161 cm |
199 cm |
|
2 |
Sensor 2 (S2) |
40 cm |
80 cm |
160 cm |
200 cm |
|
3 |
Sensor 3 (S3) |
40 cm |
80 cm |
160 cm |
200 cm |
|
4 |
Sensor 4 (S4) |
40 cm |
80 cm |
160 cm |
200 cm |
-
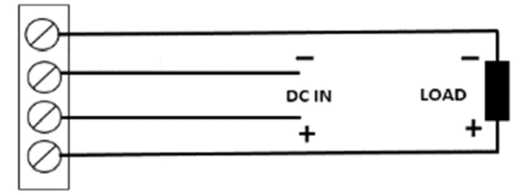
E. Pengujian rangkaian output
Pengujian dilakukan dengan menghubungkan arduino ke motor getar DC dengan memberikan logika LOW dan HIGH pada arduino. Arus dan tegangan diukur menggunakan volt meter dan ampere meter ketika arduino diberi logika HIGH dan melihat motor getar DC(LOAD) aktif atau tidak. Blok diagram pengujian rangkaian output ditunjukkan melalu gambar 15.
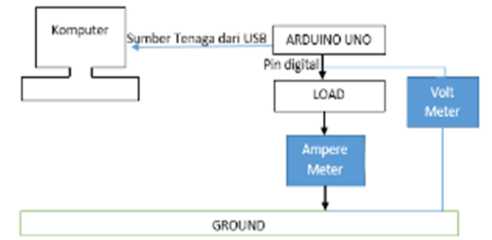
Gambar 15: Blok diagram rangkaian pengujian output
Hasil pengujian dari blok diagram pada gambar 14 yaitu tegangan yang terukur ketika arduino diberi logika HIGH adalah 4.7 Volt dan arus yang terukur ketika arduino diberi logika HIGH adalah 0.07 Ampere. Motor DC ketika diberi logika HIGH memberikan respon sehingga motor DC hidup. Hasil pengukuran tegangan dapat dilihat pada gambar 16(a) dan pengukuran arus dapat dilihat pada gambar 16(b).

(a) (b)
Gambar 16: Hasil pengukuran (a) tegangan (b) arus ketika rangkaian output diberi logika HIGH
Rangkaian output terdiri dari Motor getar DC dan driver motor berupa trasnsistor. Rangkaian ini berguna untuk memberikan getaran pada pengguna alat pemandu tuna netra agar mengerti jika terdapat halangan / benda disekitarnya. Hasil pengujian rangkaian output ketika diberi logika LOW dan HIGH ditunjukkan pada tabel IV.
TABEL III: HASIL PENGUJIAN RANGKAIAN INPUT
|
No |
Nama Motor |
Hasil Pengujian | |
|
LOW |
HIGH | ||
|
1 |
Motor 1 (M1) |
Mati |
Hidup |
|
2 |
Motor 2 (M2) |
Mati |
Hidup |
|
3 |
Motor 3 (M3) |
Mati |
Hidup |
|
4 |
Motor 4 (M4) |
Mati |
Hidup |
-
F. Pengujian sistem
Pengujian sistem merupakan gabungan dari perangkat keras yang sudah diuji dan perangkat lunak berupa kode-kode yang telah dibuat melalui flowchart pada gambar 5. Alat pemadu tuna netra yang telah selesai digabungkan selanjutnya dipakai oleh pengguna dan melakukan pengujian di dalam ruangan untuk melihat kinerja alat pemandu tuna netra. Pengguna alat pemandu tuna netra akan berjalan-jalan dalam sebuah ruangan di laboratorium teknik elektro dan ketika alat mendeteksi adanya halangan maka motor DC akan bergetar untuk memberitahukan pengguna. Kemudian pengguna akan menghindari datangnya getaran agar tidak menabrak halangan atau benda yang sudah terdeteksi. Perangkat lunak memberikan spesifikasi pada alat pemandu dalam menentukan jarak benda yang terdeteksi sensor ultrasonik HC-SR04. Jarak yang terdeteksi untuk sensor bagian kiri dan kanan sabuk yaitu kurang atau sama dengan 30 cm, sensor yang berada di bagian depan sabuk yaitu kurang atau sama dengan 150 cm. Hasil dai pengujian ini terlihat pada gambar 17(a), 17(b), 17(c) dan 17(d).
Muhammad Namiruddin Al-Hasan: Rancang Bangun Pemandu Tuna…
p-ISSN:1693 – 2951; e-ISSN: 2503-2372


(a) (b)
yang baik dari pembacaan sensor ultrasonik HCSR – 04, pengolahan data arduino UNO, dan penentuan output motor getar sesuai jarak yang diberikan oleh program dari perangkat lunak arduino UNO.
REFERENSI

(c)
(d)
Gambar 17: Hasil pengujian sistem (a) kiri (b) kanan (c) depan (d) bawah
pengguna
-
[1] Subandi. “Alat Bantu Mobilitas untuk tuna netra berbasis elektronik”. jurnal teknologi, volume 2 nomor 1 juni, 29-39.2009
-
[2] Budiharto, Widodo.”10 Proyek Robot Spektakuler”. Jakarta : Elex media komputindo.2015
-
[3] Arnawa, Sugiri. “Prototipe monitoring ketinggian air bendungan melalui media sosial twitter berbasis mikrokontroler Atmega-328pu”. Teknologi elektro, vol. 14, No. 2, juli-desember, 2015
-
[4] Silvia, ai fitri. “Rancang bangun akses kontrol pintu gerbang berbasis arduino dan android”. electrans,vol.13, no.1, hal. 1-10, maret, 2014
-
[5] “4mm vibration motor datasheet”. Precision microdriver, England
Gambar 17(a) menunjukkan pengujian sistem ketika mendeteksi halangan di kanan pengguna. Gambar 17(b) menunjukkan pengujian sistem ketika mendeteksi halangan di kiri pengguna. Gambar 17(c) menunjukkan pengujian sistem ketika mendetekksi halangan di depan pengguna. Gambar 17(d) menunjukkan pengujian sistem ketika mendeteksi halangan di bawah pengguna berupa tangga.
-
V. KESIMPULAN
Adapun simpulan yang dapat diambil dari hasil pengujian dan pembahasan yang telah dilakukan mengenai alat pemandu tuna netra menggunakan sensor ultrasonik berbasis mikrokontroler adalah sebagai berikut:
-
A. Alat pemandu tuna netra menggunakan sensor ultrasonik berbasis mikrokontroler dapat dibuat dengan baik menggunakan mikrontroler yang diletakkan pada sabuk sebagai desain inti dan mempunyai spesifikasi sebagai berikut:
-
a. Sensor S1 mempunyai spesifikasi mendeteksi
halangan dari 1 cm – 30 cm.
-
b. Sensor S2 mempunyai spesifikasi mendeteksi
halangan dari 1 cm – 150 cm.
-
c. Sensor S3 mempunyai spesifikasi mendeteksi
halangan dari 1 cm – 30 cm.
-
d. Sensor S4 mempunyai spesifikasi mendeteksi
halangan dari 120 cm – 125 cm.
-
B. Alat pemandu tuna netra menggunakan sensor ultrasonik berbasis mikrokontroler memiliki kinerja perangkat keras
ISSN 1693– 2951
Muhammad Namiruddin Al-Hasan: Rancang Bangun Pemandu Tuna…
Discussion and feedback