Sistem Kendali Otomatis Prototype Robot Mobil untuk Parkir Pintar Menggunakan Komunikasi Nirkabel
on
Teknologi Elektro, Vol. 15, No. 02, Juli - Desember 2016
67
SISTEM KENDALI OTOMATIS PROTOTYPE ROBOT MOBIL UNTUK PARKIR PINTAR MENGGUNAKAN KOMUNIKASI NIRKABEL
I Gede Pande Mastra Sedana1, Ngurah Indra ER2, Linawati3
Abstract—Robotics technology have evolve rapidly to assist society using machines according to the needs. The basic purpose of robotics technology development is to help human on certain task which need high accuracy, risky, or jobs with repetition. One robotics technology application that closely related to control system is prototyping of Car Robot Automatic System for Smart Parking implementing Wireless Communication. The system used HC-05 Bluetooth based on ATmega32 microcontroller controlling system. HC-05 Bluetooth acted as wireless communication media that connect the car robots and the smartphone. ATmega32 microcontroller on the robot receive inputs from range sensor, line sensor, push button, and smartphone. The processed result of the car robot microcontroller transmit back to the smartphone, and the microcontroller on the car robot controlled the motor driver so the DC motor and the wheels on the car robot moved. The final result achieved in this research are wireless communication system that can control the movement of the car robot, read ranges of the front, left and right side, read the value of the line sensor, move forward, backward, turn left and right according to the sensor data. This movement by the car robot can be execute manually and also automatically
Intisari—Teknologi robotika berkembang pesat untuk membantu kerja masyarakat dengan mesin sesuai kebutuhan. Sesuai tujuan dasar dari pengembangan teknologi robotika yaitu untuk membantu manusia dalam mengerjakan pekerjaan yang membutuhkan keakuratan tinggi, memiliki resiko tinggi, dan pekerjaan yang dilakukan berulang-ulang. Salah satu aplikasi teknologi robotika yang berhubungan dengan sistem kontrol adalah prototype dari sistem kendali otomatis robot mobil untuk parkir pintar menggunakan komunikasi nirkabel. Sistem ini menggunakan bluetooth HC-05 berbasis sistem kontrol ATmega32. Bluetooth HC-05 bertindak sebagai media komunikasi nirkabel yang menghubungkan robot mobil dengan smartphone. Sistem kontrol Atmega32 pada robot mobil menerima data input melalui sensor jarak, sensor garis, tombol dan smartphone. Hasil yang telah diproses pada sistem kontrol robot mobil ditransmisikan kembali ke smartphone. Sistem kontrol pada robot mobil dapat mengendalikan driver motor sehingga motor dc berputar dan robot mobil bergerak. Hasil akhir yang dicapai melalui penelitian ini adalah sistem komunikasi nirkabel yang dapat mengkontrol pergerakan pada robot mobil, membaca jarak pada sisi depan robot mobil, kiri dan kanan, membaca nilai dari sensor garis robot mobil, bergerak maju, mundur, berbelok ke kiri dan kanan sesuai
dengan data yang diterima sensor. Pergerakan dari robot mobil dapat diatur baik secara manual maupun otomatis.
Kata Kunci—prototype parkir pintar, robot mobil, mikrokontroler, ATmega32, Bluetooth HC-05.
Teknologi robotika berkembang dengan sangat pesat, dimana kehidupan masyarakat sangat banyak di bantu dengan hadirnya robot yang dapat dipekerjakan sesuai dengan kebutuhan. Utamanya dalam industri bidang otomotif yang dapat melakukan pengembangan aplikasi robotika. Oleh karenanya timbul ide untuk mengembangkan teknologi terutama di bidang robotika, yakni robot mobil nirkabel.
Perkembangan teknologi pada smartphone juga sangat pesat, dimana berbagai aplikasi yang terdapat di dalamnya dapat diaplikasikan pada bidang robotika, khususnya teknologi telekomunikasi nirkabel. Komunikasi nirkabel adalah sistem komunikasi pada suatu jaringan yang menggunakan gelombang radio sebagai media transmisi.
Robot mobil pada umumnya telah dapat dikendalikan menggunakan remote control (RC) secara nirkabel, namun tidak dilengkapi dengan fungsi deteksi jarak penghalang disekitarnya.
Deteksi jarak terhadap penghalang merupakan fungsi penting yang harus dimiliki untuk dapat bergerak, mengetahui adanya penghalang, menghindari, dan bergerak ke posisi yang diinginkan. Untuk mencapai kemampuan tersebut maka akan diintegrasikan sistem kontrol ATmega32 dengan sensor jarak, bluetooth, sensor garis, dan motor driver pada robot mobil..
Selanjutnya akan diintegrasikan pula software pada smartphone yang digunakan sebagai pengendali pengganti remote control biasa, yang juga berfungsi sebagai sarana komunikasi dengan robot mobil. Smartphone dapat digunakan sebagai sarana kendali posisi dari robot mobil untuk mencari posisi parkir dan dapat menjadi sarana komunikasi data yang dapat dilakukan melalui smartphone.
Akhirnya akan diperlihatkan bagaimana kinerja sistem parkir pintar yang telah diintegrasikan pada robot mobil ditinjau dari akurasi posisi ketika sistem dikendalikan secara manual maupun otomatis.
Robot mobil merupakan aplikasi yang dirancang agar tercipta suatu sistem parkir pintar yang memanfaatkan sensor dengan menggunakan komunikasi nirkabel bluetooth series HC-05 berbasis sistem kontrol ATmega32. Perangkat bluetooth series HC-05 nantinya akan bertindak sebagai media komunikasi nirkabel yang mengirimkan data dari smartphone sesuai dengan instruksi menuju ke rangkaian robot mobil (transciever).
e ... p-ISSN:1693 – 2951; e-ISSN: 2503-2372
Diharapkan hasil penelitian sistem parkir pintar robot mobil dengan memanfaatkan sensor jarak dan menggunakan komunikasi Bluetooth Series HC-05 berbasis sistem kontrol ATmega32 ini, dapat digunakan untuk mengendalikan robot mobil dalam pengambilan posisi pada tempat yang sulit dijangkau oleh mata manusia. Pengambilan posisi ini bisa berupa posisi parkir di tempat yang sempit pada suatu ruangan.
-
A. State of The Art Review
Penelitian tentang robot mobil saat ini telah banyak dilakukan, terutama yang berkaitan dengan perancangan perangkat keras serta metode pergerakan pada robot mobil. Namun, dari penelitian tersebut belum ada yang melakukan penelitian mengenai pengembangan pengendalian pergerakan robot mobil yang secara mudah dapat dilakukan oleh setiap orang, karena sebagian besar robot mobil saat ini dikendalikan dengan menggunakan remote control atau kendali secara otomatis. Melalui penelitian mengenai prototype sistem kendali otomatis robot mobil untuk parkir pintar menggunakan komunikasi nirkabel, diharapkan mampu untuk mempermudah mengendalikan pergerakan dari robot mobil pada saat menelusuri ruangan. Berikut ini beberapa referensi yang dapat dijadikan acuan dalam menjelaskan mengenai penelitian tentang prototype sistem kendali otomatis robot mobil.
-
1. Pada penelitian yang dilakukan oleh B.Ranga Raju yang di publish pada sebuah jurnal penelitian dari Sri Vasavi Engineering College, Tadepalligudem, India pada tahun 2014 yang berjudul “ARM7 Microcontroller based Robot controlled by an Android mobile utilizing Bluetooth”, diperoleh bahwa dalam penelitian ini penulis menggunakan remote control dari android yang berfungsi untuk kendali wireless pada mobile robot sehingga memungkinkan mobile robot mampu menerima perintah melalui android. [6].
-
2. Pada penelitian yang dilakukan oleh Ritika Pahuja yang di publish pada sebuah jurnal penelitian dari BRCM College of Engineering & Technology, Bahal, India pada tahun 2014 yang berjudul “Android Mobile Phone Controlled Bluetooth Robot Using 8051 Microcontroller”, diperoleh bahwa dalam penelitian ini penulis menggunakan bluetooth HC series sebagai receiver dan pada smartphone digunakan Software Bluetooth RC Control yang sudah dapat di download secara langsung di appstore yang berfungsi untuk kendali wireless mobil robot [10].
-
B. Mikrokontroler
ATmega32 merupakan jenis mikrokontroler AVR CMOS 8-bit berbasis arsitektur AVR RISC (Reduced Intrution Set Computer). AVR juga mempunyai In-System Programmable Flash on-chip yang mengijinkan memori program untuk diprogram ulang dalam sistem menggunakan hubungan serial SPI [4].
ATmega32 mempunyai empat buah port yaitu Port.A, Port.B, Port.C, dan Port.D.mKonfigurasi pin mikrokontroler
ATmega32 dengan kemasan 40-pin DIP (dual inline package)
ditunjukkan pada Gambar 1.
(XCKZTO) PBO C (T1) PB1 C
(INT2∕AIN0) PB2 C
(OC0/AIN1) PB3 L
(SS) PB4 C
(MOSI) PB5 E
(MISO) PB6 C
(SCK) PB7 C RESET C VCC C GND C
XTAL2 C
XTAL1 □
2
3
4
5
6
B
9
10
40 □
39 □
(RXD) (TXD) (INTO) (INT1)
(0C1B) (OC1A)
(ICP1)
PDO C
PD1 C
PD2 C
PD3 C
PD4 C
PD5 C
12
13
14
15
16
18
19
PD6 C 20
37
36
35
34
33
32
31
30
29
26
27
26
25 24
23
2 2
21
PAO (ADCO) PA1 (ADC1) PA2 (ADC2) PA3 (ADC3) PA4 (ADC4) PA5 (ADC5)
PA6 (ADC6) PA7 (ADC7) AREF GND AVCC
PC7 (TOSC2) PC6 (TOSC1) PC5 (TDI) PC4 (TDO) PC3 (TMS) PC2 (TCK)
PC1 (SDA) PCO (SCL) PD7 (0C2)
Gambar 1: Konfigurasi pin Atmega32 [5]
-
1) Komunikasi Serial USART: USART singkatan dari (Universal Syncronous Asyncronous Receiver / Transmiter). Mikrokontroler ATmega32 memiliki kelebihan sistem USART yaitu :
-
• Operasi full duplex (mempunyai register receiver dan transmitter yang terpisah).
-
• Operasi Syncronous dan Asyncronous.
-
• Medukung komunikasi multi prosesor.
-
• Mode kecepatan transmisi data berorde Mbps. [1]
-
C. Regulator
IC Regulator atau yang sering disebut sebagai regulator tegangan (voltage regulator) merupakan suatu komponen elektronik yang melakukan suatu fungsi yang terpenting dan berguna dalam perangkat elektronik baik digital maupun analog. Konfigurasi pin regulator 78xx ditunjukkan pada gambar 2.
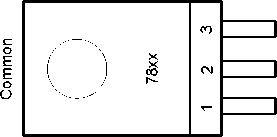
Output
Common
Input
Gambar 2: Ilustrasi konfigurasi pin IC Regulator 78xx
Regulator 7805 & 7809 memerlukan tegangan positif dengan tiga terminal masing-masing terminal input, terminal output dan terminal ground. Tegangan yang akan diregulasi diberikan pada terminal input dan ground [4].
-
D. LCD Display Module
LCD Display Module M1632 terdiri dari dua bagian, yang pertama merupakan panel LCD sebagai media penampil informasi dalam bentuk huruf/angka, yang dapat menampung 16 huruf/angka di setiap baris. Bagian kedua merupakan sistem pengontrol panel LCD, yang berfungsi mengatur tampilan informasi serta berfungsi mengatur komunikasi
M1632 dengan mikrokontroler [5]. Konfigurasi pin 16x2 LCD ditunjukkan pada Gambar 3.
G. Sensor Garis
Gambar 3: Ilustrasi LCD modul M1632
-
E. Push Button
Push button pada robot mobil berfungsi sebagai perantara fisik dalam memberikan inputan untuk mengendalikan robot mobil. Push button digunakan untuk memberikan perintah kepada mikrokontroler dengan membedakan nilai tegangan pada pin input mikrokontroler.
Ketika push button ditekan maka nilai tegangan akan menjadi 0V dan ketika push button tidak ditekan maka nilai tegangan yang didapatkan akan menjadi 5V. Ilustrasi ditunjukan pada Gambar 4.
Ditekan Tidak Ditekan
ON
OFF
Gambar 4: Ilustrasi push button
-
F. Modul H-Bridbge L293D
Modul H-Bridge berbasis L293D di disain untuk menghasilkan dua arah putaran CW (clock wise) maupun CCW (counter clock wise), dengan arus kontinyu sampai dengan 3 A pada rentang tegangan 5 VDC sampai 36 VDC. Selain itu modul ini dilengkapi dengan rangkaian sensor arus beban yang dapat digunakan sebagai umpan balik ke pengendali. Modul ini mampu mengontrol beban induktif seperti relay, solenoida, dan motor DC [7]. Ilustrasi L293D ditunjukan oleh Gambar 5.
|
1,2 EN |
1 < |
J 16 |
Vcc1 |
|
1 A |
2 |
15 |
4A |
|
1 Y |
3 |
14 |
4Y |
|
Heat Sink and |
4 |
13 |
Heat Sink and |
|
Ground |
5 |
12 |
Ground |
|
2Y |
6 |
11 |
3Y |
|
2A |
7 |
10 |
3A |
|
Vcc2 |
8 |
9 |
3,4 EN |
Untuk membedakan lokasi parkir yang kosong dan jalan yang harus dilalui, maka dapat dilakukan pendeteksian dengan menggunakan sensor garis photodiode yang dipasang pada bagian bawah robot. Sensor ini berfungsi untuk dapat membedakan warna jalur yang berada di bawah robot.
Sensor ini menggunakan lampu led yang akan memancarkan cahaya dan photodiode yang akan mendeteksi pantulan cahaya dari lampu led tersebut seperti pada Gambar 6.
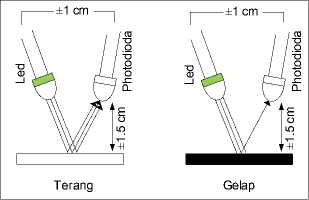
Gambar 6: Ilustrasi pembacaan pantulan cahaya dari sensor garis
-
H. Sensor Jarak SRF04
Sensor ini memerlukan 2 pin I/O untuk berkomunikasi dengan mikrokontroler, yaitu Trigger dan Echo. Untuk mengaktifkan SRF04 mikrokontroler mengirimkan pulsa positif melalui pin Trigger minimal 10 μs, selanjutnya SRF04 akan mengirimkan pulsa positif melalui pin Echo selama 100 μs hingga 18 ms, yang sebanding dengan jarak obyek. Dibandingkan dengan sensor ultrasonik lain, seperti PING, SRF04 mempunyai kemampuan yang setara, yaitu rentang pengukuran antara 3 cm – 3 m, dan output yang sama, yaitu panjang pulsa. Meski cara pengoperasiannya juga mirip, namun kedua sensor tersebut berbeda jumlah pin I/O-nya, yaitu 2 untuk SRF04 dan 1 untuk PING. Ilustrasi bentuk fisik dari modul SRF-04 ditunjukkan pada Gambar 7.
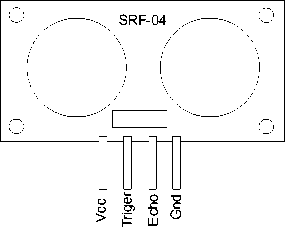
Gambar 7: Bentuk fisik sensor infrared [8]
-
I. Rangkaian Sounder
Rangkaian sounder berfungsi untuk memberikan tanda dalam bentuk suara pada robot mobil. Tanda diberikan pada kondisi tertentu yang di inginkan oleh user yang sudah di program pada robot mobil. Ilustrasi rangkaian sounder dapat dilihat pada Gambar 8.
Gambar 5: Ilustrasi pin L293D
I Gede Pande Mastra Sedana:Sistem Kendali Otomatis Prototype ...
p-ISSN:1693 – 2951; e-ISSN: 2503-2372

Speaker Off

Gambar 8: Ilustrasi rangkaian sounder
J. Bluetooth
Bluetooth adalah sebuah teknologi komunikasi nirkabel (tanpa kabel) yang beroperasi dalam pita frekuensi 2,4 GHz unlicensed ISM (Industrial, Scientific and Medical) dengan menggunakan sebuah frequency hopping transceiver yang mampu menyediakan layanan komunikasi data dan suara secara real-time antara host-host bluetooth dengan jarak jangkauan layanan yang terbatas.
-
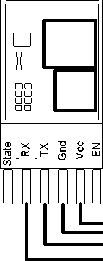
1) Modul Wireless Bluetooth: Bluetooth HC-05 merupakan modul wireless yang beroperasi pada 2,4 GHz. Modul wireless Bluetooth HC-05 memerlukan catu daya 3,3 VDC, arus rata-rata 25 mA, daya RF = +4dBm dengan jangkauan jarak 10 meter. Bentuk fisik dari modul wireless Bluetooth HC-05 ditunjukkan pada Gambar 9.
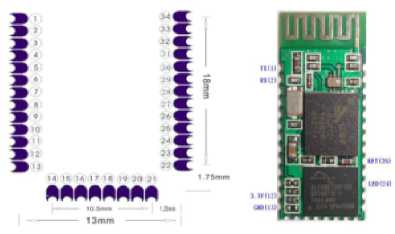
Gambar 9: Modul wireless bluetooth HC-05
Tabel 1 merupakan fungsi dari masing-masing pin I/O pada modul wireless Bluetooth HC-05.
TABEL I
Fungsi Pin I/O Modul Bluetooth HC-05
|
No |
Pin |
Name |
Direction |
Description |
|
1 |
12 |
VCC |
- |
Power Supply |
|
2 |
1 |
UART_TX |
Output |
UART Data Out |
|
3 |
2 |
UART_Rx |
Input |
UART Data In |
|
4 |
13, 22 |
GND |
- |
Ground |
|
5 |
26 |
Key |
Input |
UART Setting |
K. Basic Compiler AVR
Basic Compiler AVR merupakan software C-cross compiler, yaitu program dapat ditulis dalam bahasa basic, Proses download program ke IC mikrokontroler AVR dapat menggunakan system download secara ISP (in-System Programming). [1] software ini bisa di download di situs resmi atmel http://www.mcselec.com/. Gambar 10 merupakan tampilan awal software Basic Compiler AVR.
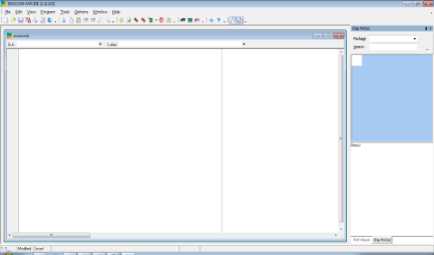
Gambar 10: Tampilan awal software basic compiler AVR [1]
L. MIT app Inventor
Kendali robot mobil yang dibuat menggunakan aplikasi online melalui website http://appinventor.mit.edu/explore/ dapat diakses untuk keperluan software android. App Inventor adalah sebuah tool untuk membuat aplikasi android yang berbasis visual block programming. Visual block programming maksudnya adalah dalam penggunaannya user akan melihat, menggunakan, menyusun dan drag-drops. Gambar 11 merupakan tampilan awal website untuk untuk mulai membuat aplikasi.

Gambar 11: MIT App Inventor
Project pada situs ini bisa disimpan dan di download sesuai dengan keperluan user yang menggunakannya.
Metode perancangan prototype sistem kendali otomatis robot mobil untuk parkir pintar menggunakan komunikasi nirkabel terdiri dari perancangan perangkat keras dan perancangan perangkat lunak. Pada perancangan perangkat keras terdiri dari beberapa bagian yaitu:
-
1. Perancangan rangkaian minimum sistem ATmega32.
-
2. Perancangan rangkaian regulator
-
3. Perancangan rangkaian LCD
-
4. Perancangan rangkaian Push Button
-
5. Rangkaian modul driver H-Bridge
-
6. Rangkaian sensor garis
-
7. Rangkaian sensor jarak
-
8. Rangkaian sounder
-
9. Rangkaian modul Wireless Bluetooth
-
10. Perancangan Keseluruhan Sistem
Gambar 12 merupakan diagram blok keseluruhan dari prototype sistem kendali otomatis robot mobil untuk parkir pintar menggunakan komunikasi nirkabel.
(XCK/TO) PB0
(T1) PB1
(INT2/AIN0) PB2
OC0/AIN1) PB3
(SS) PB4 (MOSI) PB5 (MISO) PB6
(SCK) PB7 RESET
VCC
GND
XTAL2
XTAL1
(RXD) PD0
(TXD) PD1
(INT0) PD2
(INT1) PD3
(OC1B) PD4
(OC1A) PD5
(ICP1) PD6

40 PA0 (ADC0)
39 PA1 (ADC1)
38 PA2 (ADC2)
37 PA3 (ADC3)
36 PA4 (ADC4)
35 PA5 (ADC5)
34 PA6 (ADC6)
33 PA7 (ADC7)
32 AREF
31 GND
30 AVCC
29 PC7 (TOSC2)
28 PC6 (TOSC1)
27 PC5 (TDI)
26 PC4 (TDO)
25 PC3 (TMS)
24 PC2 (TCK)
23 PC1 (SDA)
22 PC0 (SCL)
21 PD7 (OC2)
-
Gambar 13: Perancangan Atmega32 sistem kendali robot mobil
Berikut adalah listing program untuk konfigurasi ATMEGA32. '
$regfile = "m32def.dat" ' specify the used micro
$crystal = 12000000 ' used crystal frequency
$baud = 9600 ' used baudrate
Gambar 12: Modul wireless bluetooth HC-05
Dalam perancangan Prototype Sistem Kendali Otomatis Robot Mobil untuk Parkir Pintar Menggunakan Komunikasi Nirkabel. Terdapat dua bagian perancangan, yang pertama adalah rangkaian robot mobil (transciever) terdiri dari satu buah system kontrol ATmega32, satu buah Bluetooth HC-05, dua buah motor DC, motor driver H-Bridge, 3 buah sensor jarak HC05, satu buah LCD dan empat buah sensor garis. Kemudian bagian berikutnya adalah smartphone yang berfungsi sebagai transceiver yang di dalamnya telah terinstal software Pande Bluetooth Kontrol yang digunakan untuk mengirimkan dan menerima data, memberikan perintah ke pada robot mobil dan menerima data hasil pembacaan sensor dari robot mobil.
-
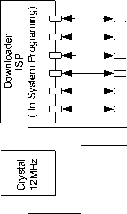
A. Perancangan Rangkaian Minimum Sistem ATMega32
Perancangan rangkaian minimum sistem merupakan bagian yang terpenting karena sebagai pengendali utama pada robot mobil. Pengendali utama menggunakan IC ATmega32 yang mempunyai empat port utama yaitu portA, portB, portC dan portD. Sistem kontrol membutuhkan rangkaian osilator sebagai sumber detak untuk pewaktu internal pada perangkat– perangkat internal dari ATmega32. Pin pada XTAL1 dan XTAL2 dihubungkan dengan kristal 12 MHz, dan kapasitor C1 dan C2 berfungsi sebagai penstabil detak yang merupakan rekomendasi dari ATMEL.
Pada Prototype Sistem Kendali Otomatis Robot Mobil Untuk Parkir Pintar Menggunakan Komunikasi Nirkabel ini, ATmega32 berfungsi sebagai pengendali dan pengolah data yang diperoleh dari tombol, push button, sensor jarak dan sensor garis yang terhubung ke system kontrol ATmega32 seperti pada Gambar 13.
-
B. Perancangan Regulator Robot Mobil
Rangkaian regulator 7805 berfungsi untuk menurunkan level tegangan menjadi +5V DC dan rangkaian regulator 7809 berfungsi untuk menurunkan level tegangan menjadi +9V DC seperti pada Gambar 14.
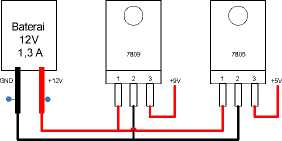
Gambar 14: Perancangan regulator robot mobil
-
C. Perancangan LCD Display Robot Mobil
Perancangan rangkaian LCD (Liquid Crystal Display) menggunakan LCD jenis M1632 yang merupakan LCD 16x2, yaitu 2 baris yang terdiri dari 16 kolom. LCD ini digunakan untuk menampilkan data-data yang dikirim dan yang diterima. Secara garis besar, pada LCD terdapat 16 pin I/O, dimana RS, R/W dan E merupakan pin kontrol pada LCD, pin DB4–DB7 merupakan jalur data 4 bit yang akan digunakan dan terhubung pada digital input-output pada minimum sistem ATmega32 seperti pada Gambar 15.
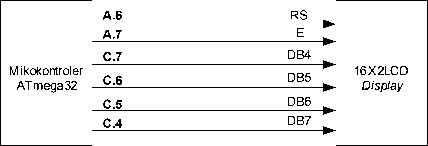
Gambar 15: Perancangan LCD display robot mobil
I Gede Pande Mastra Sedana:Sistem Kendali Otomatis Prototype ...
p-ISSN:1693 – 2951; e-ISSN: 2503-2372

Berikut adalah listing program untuk menguji LCD.
Sw1 Alias Pina.5
Sw2 Alias Pinb.4
'name : LCD.bas
'copyright: (c) 1995-2005, MCS Electronics
$regfile = “m32def.dat”
$crystal = 12000000 $baud = 9600
Config Portc.7 = Output
Config Portc.6 = Output
Config Portc.5= Output
Config Portc.4 = Output
Config Porta.6 = Output
Config Porta.7 = Output
Config LCDpin = Pin , Db4 = Portc.7 , Db5 = Portc.6 , Db6 = Portc.5 , Db7 = Portc.4 , E = Porta.7 , Rs = Porta.6
Config LCD = 16 * 2 Cursor Off c Do cls
Locate 1 , 1 LCD "Pande Mastra"
Waitms 300
LCD "120 440 50 12"
Waitms 300
Loop
-
D. Perancangan Push Button Robot Mobil
Tombol push button akan dihubungkan ke PINA.5 dan PINB.4 terhadap ground, PINA.5 dan PINB.4 merupakan pin I/O pada system kontrol AVR ATmega32. Perintah dari push button ini diolah untuk menjadi data inputan, misalnya pada saat push button ditekan maka pin I/O pada ATmega32 akan mendeteksi tegangan dibawah +3.5V, sebaliknya jika tidak di tekan maka pin I/O akan mendeteksi tegangan +5V. Ilustrasi Push button pada pin B.4 seperti pada Gambar 16.
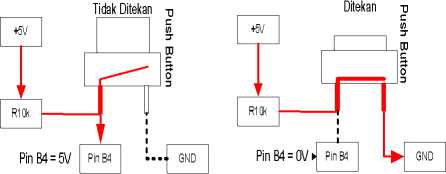
Gambar 16: Perancangan push button robot mobil
Berikut adalah listing program untuk pengujian push button.
$regfile = “m32def.dat”
$crystal = 12000000
Config Pina.5 = Input
Config Pinb.4 = Input
Config Portc.7 = Output
Config Portc.6 = Output
Config Portc.5= Output
Config Portc.4 = Output
Config Porta.6 = Output
Config Porta.7 = Output
Config LCDpin = Pin , Db4 = Portc.7 , Db5 = Portc.6 , Db6 = Portc.5 , Db7 = Portc.4 , E = Porta.7 , Rs = Porta.6
Config LCD = 16 * 2
Cursor Off
Do
cls
If Sw1 = 0 Then
Cls
Locate 1 , 1
LCD "SW1"
Wait 1
End If
If Sw2 = 0 Then
Cls
Locate 1 , 1
LCD “SW2"
Wait 1
End If
Loop
-
E. Perancangan Modul Driver H-Bridge Robot Mobil
Rangkaian modul driver H-Bridge pada penelitian ini menggunakan sebuah modul driver H-Bridge berbasis IC L293D, dimana modul driver H-Bridge ini dapat men-driver arus kontinyu maksimal 1 Amper dan tegangannya dari 5.5 VDC s/d 36 VDC. Dapat dilihat pada Gambar 17 adalah interface modul H-Bridge.
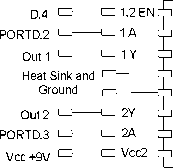
1 ''-'l 1≡ 6 Vcc1 O---□ Vcc+5V
2 15 A 4A □--□ P0RTD.7
3 14 Λ 4Y □--□0ut4
4 13 o------o Heat Sink and
5 ∙∣2 π______□ Ground
6 11 O 3Y O---(=)Out 3
7 1MOTOR.jpgφ 3A CZi----(ZZ∣poRTD.6
8 9 03,4 EN O--O D-5
Gambar 17: Perancangan motor driver L293D dengan robot mobil
Berikut adalah listing program untuk menguji modul driver H-Bridge.
'---------------------------------------------------
$regfile = “m32def.dat”
$crystal = 12000000
Config Pina.5 = Input
Config Pinb.4 = Input
Config Portc.7 = Output
Config Portc.6 = Output
Config Portc.5= Output
Config Portc.4 = Output
Config Porta.6 = Output
Config Porta.7 = Output
Config LCDpin = Pin , Db4 = Portc.7 , Db5 = Portc.6 , Db6 = Portc.5 , Db7 = Portc.4 , E = Porta.7 , Rs = Porta.6
Config LCD = 16 * 2
Cursor Off
Config Portd.2 = Output
Config Portd.3 = Output
Config Portd.4 = Output
Config Portd.5 = Output
Config Portd.6 = Output
Config Portb.0 = Output Do
Portd.7 = 0
Portd.6 = 1
Pwm1a = 100
Pwm1b = 100
Portd.2 = 0
Portd.3 = 1
Waitms 30 Loop
Stop Adc
End Sub
-
F. Perancangan Sensor Garis Robot Mobil
Untuk membedakan tempat parkir yang kosong dan mengetahui jalan yang harus dilalui, maka dapat dilakukan pendeteksian dengan menggunakan sensor garis photodioda yang digunakan sebanyak 4 buah. Sensor ini berfungsi untuk dapat membedakan warna jalur yang berada di bawah robot, perancangan sensor seperti pada Gambar 18.
-
G. Perancangan Sensor Jarak Robot Mobil
SRF04 jenis ini mempunyai catu daya input sebesar 5VDC dengan arus maksimal 100 mA, dengan jarak jangkauan yang bisa diatur mulai dari 3 cm sampai dengan 300 cm. Pada Gambar 19 merupakan gambar SRF04 ilustrasi.
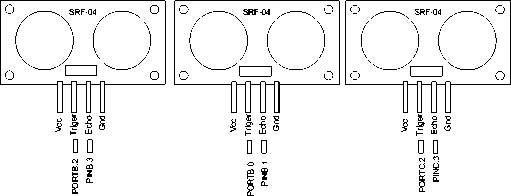
Gambar 19: Perancangan sensor jarak robot mobil
Gambar 18: Perancangan sensor garis robot mobil
Listing program, deklarasi, dan cara akses sensor garis photodiode dapat dilihat sebagai berikut.
$regfile = “m32def.dat”
$crystal = 12000000 $baud = 9600
Dim F As String * 2
Config Pina.0 = Input
Config Pina.1 = Input
Config Pina.2 = Input
Config Pina.3 = Input
Config Pina.5 = Input
Config Pinb.4 = Input
Config Portc.7 = Output
Config Portc.6 = Output
Config Portc.5= Output
Config Portc.4 = Output
Config Porta.6 = Output
Config Porta.7 = Output
Config LCDpin = Pin , Db4 = Portc.7 , Db5 = Portc.6 , Db6 = Portc.5 , Db7 = Portc.4 , E = Porta.7 , Rs = Porta.6
Config LCD = 16 * 2
Cursor Off
Config Adc = Single , Prescaler = Auto
Dim S(4) As Byte , Sensor(4) As Integer Declare Sub Baca adc
Do
Cls
Gosub Baca_adc
Locate 1 , 1 : LCD Sensor(1) ; " "
Locate 1 , 13 : LCD Sensor(4) ; " "
Locate 2 , 1 : LCD Sensor(2) ; " "
Locate 2 , 13 : LCD Sensor(3) ; " "
Loop
Sub Baca adc
Start Adc
Sensor(1) = Getadc(0)
Sensor(2) = Getadc(1)
Sensor(3) = Getadc(2)
Sensor(4) = Getadc(3)
Berikut ini adalah listing program untuk pengujian sensor SRF04 yang terhubung ke sistem kontrol.
$regfile = “m32def.dat”
$crystal = 12000000
Config Pina.5 = Input
Config Pinb.4 = Input
Config Portc.7 = Output
Config Portc.6 = Output
Config Portc.5= Output
Config Portc.4 = Output
Config Porta.6 = Output
Config Porta.7 = Output
Config LCDpin = Pin , Db4 = Portc.7 , Db5 = Portc.6 , Db6 = Portc.5 , Db7 = Portc.4 , E = Porta.7 , Rs = Porta.6
Config LCD = 16 * 2
Cursor Off
Config Portc.4 = Output
Config Pinc.3 = Input
Trigger Alias Portc.4
Echoultra Alias Pinc.3
Config Timer0 = Timer , Prescale = 1024
On Timer0 Overflow
Dim A As Byte
Dim Dae As Integer
Dim Data1 As Integer
Dim Data2 As Integer
Declare Sub Ultra
Enable Interrupts
Enable Timer0
Declare Sub Lihat
Config LCDpin = Pin , Db4 = Portc.6 , Db5 = Portc.7 , Db6 = Portc.5 , Db7 = Porta.7 , E = Porta.5 , Rs = Porta.6
Cursor Off
Do
Cls
Locate 1 , 1
LCD Data21
Locate 1 , 5
LCD Data23
Nilai_sensor = Data2
Locate 2 , 5
LCD Nilai sensor
I Gede Pande Mastra Sedana:Sistem Kendali Otomatis Prototype ...
p-ISSN:1693 – 2951; e-ISSN: 2503-2372
Call Ultra Waitms 100 Loop
Sub Ultra:
|
Tcnt0 A = 0 |
= 0 |
|
Dae = |
0 |
|
Data1 |
= 0 |
|
Data2 |
= 0 |
|
Reset |
Trigger |
Waitus 10
Set Trigger
Waitus 10
Reset Trigger
Do
Loop Until Echoultra = 1
Start Timer0
Do
If A > 98 Then
Stop Timer0
Data2 = 300
Goto Akhir
End If
Loop Until Echoultra = 0
Stop Timer0
Dae = Tcnt0
|
Data1 |
= A * 256 |
|
Data2 |
= Data1 + Dae |
|
Data2 |
= Data2 * 85 |
|
Data2 |
= Data2 / 58 |
Akhir:
Speaker
CL O CL
Gambar 20: Perancangan sounder robot mobil
Berikut ini merupakan listing program penamaan pin pada BASCOM AVR untuk sensor Sounder.
$regfile = “m32def.dat” $crystal = 12000000 Config Port.4 = output
Do
Set porta.4
Waitms 1000
Reset porta.4
Waitms 1000
Loop
I. Perancangan Modul Wireless Bluetooth Robot Mobilc
Waitus 10 End Sub Overflow:
A = A + 1 Return
'SRF04 1
Config Pinb.2 = Output
Config Pinb.3 = Input
Trigger Alias Portb.2
Echoultra Alias Pinb.3
'SRF04 2
Config Pinb.0 = Output
Config Pinb.1 = Input
Trigger1 Alias Portb.0
Echoultra1 Alias Pinb.1
(xcκσo) PBO (T1) PB1
(INT2∕AIN0)PB2
OC0/AIN1) PB3
(SS) PB4
(MOSI) PB5
(MISO) PB6
(SCK) PB7 RESET
^^—^^—□ VCC
□ GND
XTAL2
XTA L1
----□ (RXD) PDO
---□ (TXD) PD1
(INT0)PD2
(INT1)PD3
—I (OC1B)PD4
(0C1A)PD5
(ICP1) PD6


PAO (ADCO) PA1 (ADC1) PA2 (ADC2) PA3 (ADC3) PA4 (ADC4) PA5 (ADC5) PA6 (ADC6) PA7 (ADC7) AREF
GND
AVCC
PC7(TOSC2) PC6(TOSC1) PC5 (TDI) P C4 (TDO) PC3 (TMS) PC2 (TCK) PC1 (SDA) PCO (SCL) PD7(OC2)
Gambar 21: Perancangan wireless bluetooth robot mobil
'SRF04 3
Config Pinc.2 = Output
Config Pinc.3 = Input
Trigger2 Alias Portc.2
Echoultra2 Alias Pinc.3
-
H. Perancangan Sounder Robot Mobil
Perancangan sound pada robot mobil bertujuan utnuk memberikan tanda peringatan apabila robot mencapai target tertentu. Ilustrasi sound pada robot ditunjukan oleh Gambar 20.
Berikut ini adalah listing program untuk pengujian Bluetooth HC-05 yang terhubung ke sistem kontrol.
'---------------------------------------------------
$regfile = “m32def.dat”
$crystal = 12000000
$baud = 9600
Dim F As String * 2 Config Pina.5 = Input Config Pinb.4 = Input Config Portc.7 = Output Config Portc.6 = Output Config Portc.5= Output Config Portc.4 = Output Config Porta.6 = Output Config Porta.7 = Output
Config LCDpin = Pin , Db4 = Portc.7 , Db5 = Portc.6 , Db6 = Portc.5 , Db7 = Portc.4 , E = Porta.7 , Rs = Porta.6
Config LCD = 16 * 2 Cursor Off
Do
Locate 1 , 1
Lcd “Tes”
Print “Tes"
Waitms 100
loop
-
A. Hasil Software Untuk Robot Mobil
Tampilan software Pande Bluetooth Control untuk kendali robot mobil pada smartphone dapat dilihat pada Gambar 22.

Gambar 22: Tampilan kendali robot mobil pada smartphone
Software dibuat agar dapat dijalankan di dalam smartphone tipe android yang memiliki fitur bluetooth. Software didesain untuk dapat mengirim dan menerima data secara bergantian. Masing-masing tombol yang terdapat pada tampilan kendali robot mobil memiliki penjelasan dan fungsi yang berbeda-beda.
-
B. Hasil Hardware Untuk Robot Mobil
Tampilan Hardware untuk prototype sistem kendali otomatis robot mobil untuk parkir pintar menggunakan komunikasi nirkabel dapat dilihat pada Gambar 23.
I Gede Pande Mastra Sedana:Sistem Kendali Otomatis Prototype

Gambar 23: Tampilan hardware robot mobil
Hardware dibuat agar dapat dijalankan di dalam lintasan yang memiliki permukaan datar. Hardware didesain untuk dapat mengirim dan menerima data secara bergantian. Masing-masing tombol yang terdapat pada robot mobil memiliki penjelasan dan fungsi yang berbeda-beda.
-
C. Hasil Pengujian LCD Display
Tujuan dari pengujian rangkaian LCD adalah untuk mengetahui apakah rangkaian LCD display yang dirancang dapat menampilkan informasi sesuai dengan yang telah direncanakan. Pengujian LCD tidak menggunakan alat ukur, tetapi langsung terhubung dengan mikrokontroler ATmega32 yang sebelumnya sudah diinputkan program pengujian. Hasil pengujian Lcd yang digunakan dapat dilihat pada Gambar 24.

Gambar 24: Tampilan pengujian LCD robot mobil
Berdasarkan hasil pengujian rangkaian LCD display dengan mikrokontroler ATmega32, dapat dilihat bahwa rangkaian LCD display sudah dapat berkerja dengan baik sesuai dengan perencanaan.
-
D. Hasil Pengujian Push Button
Push button pada robot mobil berfungsi sebagai perantara fisik dalam memberikan inputan untuk mengendalikan robot mobil. Push button digunakan untuk memberikan perintah kepada mikrokontroller dengan membedakan nilai tegangan pada pin input mikrokontroler. Gambar 25 merupakan hasil pengujian push button ketika tidak ditekan, pengujian dilakukan dengan menggunakan voltmeter digital.
p-ISSN:1693 – 2951; e-ISSN: 2503-2372

Gambar 25: Tampilan pengujian push button robot mobil
Hasil Pengujian push button pada saat ditekan dan tidak ditekan dapat dilihat pada Tabel 2.
TABEL III
Hasil Pengujian Push Button
|
No |
Pengujian |
Nilai Tegangan |
Tampilan LCD | |
|
Ditekan |
Tidak | |||
|
1 |
Push Button 1 |
0.00 V |
4,97 V |
“SW1” |
|
2 |
Push Button 2 |
0.00 V |
4,85 V |
“SW2” |
Ketika push button ditekan maka nilai tegangan akan menjadi 0V dan ketika push button tidak ditekan maka nilai tegangan yang didapatkan akan menjadi 5V.
-
E. Hasil Pengujian Sensor Jarak
Sensor jarak SRF04 digunakan sebanyak tiga buah, terletak pada bagian depan, bagian sisi kiri dan sisi kanan pada robot mobil yang langsung terhubung dengan mikrokontroler ATmega32. Sensor SRF04 berfungsi untuk mendeteksi adanya halangan. Gambar 26 merupakan hasil pengujian sensor jarak jenis SRF04.


Gambar 26: Tampilan pengujian sensor jarak robot mobil
Hasil Pengujian dan pembacaan sensor jarak dapat dilihat pada Tabel 3.
TABEL IIIII
Hasil Pengujian Sensor jarak
|
No |
Pengukuran Penggaris (cm) |
Pengukuran SRF-04 (cm) | ||||
|
Kiri |
Depan |
Kanan |
Kiri |
Depan |
Kanan | |
|
1 |
3 |
3 |
3 |
3 |
3 |
3 |
|
2 |
10 |
10 |
10 |
10 |
10 |
10 |
|
3 |
20 |
20 |
20 |
19 |
19 |
19 |
|
4 |
100 |
100 |
100 |
99 |
101 |
101 |
|
5 |
160 |
160 |
160 |
158 |
161 |
160 |
|
6 |
170 |
170 |
170 |
172 |
170 |
168 |
|
7 |
200 |
200 |
200 |
196 |
198 |
196 |
|
8 |
300 |
300 |
300 |
294 |
294 |
296 |
|
9 |
345 |
345 |
345 |
342 |
343 |
345 |
|
10 |
355 |
355 |
355 |
351 |
353 |
352 |
Pengukuran dilakukan dengan membuat variasi jarak halangan terhadap robot mobil.
-
F. Hasil Pengujian Sensor Garis
Sensor garis pada pada robot mobil berfungsi sebagai pembaca garis parkir untuk robot mobil. Gambar 27 di bawah ini merupakan hasil pengujian sensor garis ketika mendeteksi warna terang di ditampilkan dalam bentuk ADC.

Gambar 27: Sensor garis mendeteksi warna terang
Gambar 27 menunjukan ke-empat buah sensor mendeteksi warna terang. Pada saat sensor mendeteksi warna terang sensor menunjukan hasil pembacaan di bawah 100. Hal ini dikarenakan pada saat cahaya terdeteksi terang iluminasi semakin tinggi, hambatan menjadi kecil sehingga arus yang mengalir semakin besar. Hasil Pengujian sensor garis terhadap beberapa warna dapat dilihat pada Tabel 4.
TABEL IVV
Hasil Pengujian Sensor jarak
|
No |
Warna |
Nilai ADC | |||
|
Sensor1 |
Sensor2 |
Sensor3 |
Sensor4 | ||
|
1 |
Putih |
76 |
81 |
66 |
81 |
|
2 |
Hitam |
1023 |
1023 |
1023 |
1023 |
|
3 |
Coklat |
243 |
476 |
471 |
150 |
|
4 |
Biru Tua |
937 |
817 |
918 |
892 |
-
G. Hasil Pengujian Bluetooth
Pengujian ATmega32 dengan smartphone ini dilakukan dengan menampilkan data yang diterima melalui LCD display yang terdapat pada robot mobil. Pengujian pengintegrasian ini akan dilakukan dengan mengirim data satu persatu dari smartphone ke dalam mikrokontroler ATmega32, dan sebaliknya data dari ATmega32 akan ditampilkan pada jendela hiperterminal smartphone user.
Gambar 28 merupakan tampilan pengujian antara robot mobil dengan smartphone melalui aplikasi Arduino RC.
Percobaan pengujian dilakukan sebanyak 6 kali oleh dua user, Hasil pengujian dirangkum didalam Tabel 6.

Gambar 28: Hasil pengujian bluetooth
Untuk pengujian karakter yang lainnya dirangkum dalam Tabel 5 dari pengujian diambil beberapa sample dari percobaan.
TABEL V
Hasil Pengujian Bluetooth HC-05
|
No |
Data Hiperterminal |
Data Ditampilkan LCD |
Kecocokan |
|
1 |
A |
A |
Cocok |
|
2 |
B |
B |
Cocok |
|
3 |
C |
C |
Cocok |
|
4 |
D |
D |
Cocok |
|
5 |
E |
E |
Cocok |
|
6 |
F |
F |
Cocok |
|
7 |
G |
G |
Cocok |
|
8 |
H |
H |
Cocok |
|
9 |
1 |
1 |
Cocok |
|
10 |
2 |
2 |
Cocok |
|
11 |
3 |
3 |
Cocok |
|
12 |
4 |
4 |
Cocok |
|
13 |
5 |
5 |
Cocok |
|
14 |
6 |
6 |
Cocok |
|
15 |
7 |
7 |
Cocok |
|
16 |
8 |
8 |
Cocok |
|
17 |
9 |
9 |
Cocok |
H. Hasil Pengujian Pergerakan Robot Secara Manual
Pengujian pertama dilakukan tanpa adanya halangan di ruang lintasan. Pengujian dilakukan secara manual dengan menggunakan remote dari smartphone. Gambar 29 menunjukan simulasi pengujian di lintasan tanpa halangan.

TABEL VI
Hasil Pengujian Percobaan Manual Tanpa Halangan
|
No |
Waktu Tempuh |
Akurasi Posisi |
|
Percobaan 1 |
21,04 Detik |
Sampai di Tujuan |
|
Percobaan 2 |
14,04 Detik |
Sampai di Tujuan |
|
Percobaan 3 |
7,70 Detik |
Sampai di Tujuan |
|
Percobaan 4 |
11,99 Detik |
Sampai di Tujuan |
|
Percobaan 5 |
10,30 Detik |
Sampai di Tujuan |
|
Percobaan 6 |
11,02 Detik |
Sampai di Tujuan |
Diperoleh rata-rata waktu tempuh untuk percobaan manual tanpa adanya halangan yaitu 12,681 detik dengan waktu tempuh tercepat adalah 7,70 detik dan waktu tempuh terlama adalah 21,04 detik.
-
I. Hasil Pengujian Pergerakan Robot Secara Otomatis
-
1) Hasil Pengujian Pertama: Pengujian pergerakan robot mobil percobaan 1 saat parkir di lintasan tanpa halangan dapat dilihat pada Gambar 30.

Gambar 30: Hasil pengujian percobaan mode otomatis 1
Percobaan pengujian dilakukan sebanyak 5 kali dan hasil pengujian dirangkum pada Tabel 7.
TABEL VII
Hasil Pengujian pergerakan robot mobil percobaan 1
|
No |
Waktu Tempuh |
Akurasi Posisi |
Metode Telusur Robot |
|
1 |
09,06 Detik |
Sampai di Tujuan |
Telusur Kanan |
|
2 |
08,39 Detik |
Sampai di Tujuan |
Telusur Kanan |
|
3 |
09,60 Detik |
Sampai di Tujuan |
Telusur Kanan |
|
4 |
04,51 Detik |
Sampai di Tujuan |
Telusur Kiri |
|
5 |
04,92 Detik |
Sampai di Tujuan |
Telusur Kiri |
-
2) Hasil Pengujian Kedua: Pengujian akurasi posisi robot mobil percobaan 2 saat parkir di lintasan tanpa halangan dapat dilihat pada Gambar 31.
Gambar 29: Simulasi tanpa halangan
I Gede Pande Mastra Sedana:Sistem Kendali Otomatis Prototype ...
p-ISSN:1693 – 2951; e-ISSN: 2503-2372

Gambar 31: Hasil pengujian percobaan mode otomatis 2
Percobaan pengujian dilakukan sebanyak 5 kali dan hasil pengujian dirangkum didalam Tabel 8.
-
4) Hasil Pengujian Keempat: Pengujian akurasi posisi robot mobil percobaan 4 saat parkir di lintasan tanpa halangan dapat dilihat pada Gambar 33.

Gambar 33: Hasil pengujian percobaan mode otomatis 4
TABEL VIII
Hasil Pengujian pergerakan robot mobil percobaan 2
|
No |
Waktu Tempuh |
Akurasi Posisi |
Metode Telusur Robot |
|
1 |
11,16 Detik |
Sampai di Tujuan |
Telusur Kanan |
|
2 |
11,68 Detik |
Sampai di Tujuan |
Telusur Kanan |
|
3 |
11,41 Detik |
Sampai di Tujuan |
Telusur Kanan |
|
4 |
03,45 Detik |
Sampai di Tujuan |
Telusur Kiri |
|
5 |
03,31 Detik |
Sampai di Tujuan |
Telusur Kiri |
3) Hasil Pengujian Ketiga: Pengujian akurasi posisi robot mobil percobaan 3 saat parkir di lintasan tanpa halangan dapat dilihat pada Gambar 32.

Gambar 32: Hasil pengujian percobaan mode otomatis 3
Percobaan pengujian dilakukan sebanyak 5 kali dan hasil pengujian dirangkum pada Tabel 9.
TABEL IX
Hasil Pengujian pergerakan robot mobil percobaan 3
|
No |
Waktu Tempuh |
Akurasi Posisi |
Metode Telusur Robot |
|
1 |
11,16 Detik |
Sampai di Tujuan |
Telusur Kanan |
|
2 |
11,68 Detik |
Sampai di Tujuan |
Telusur Kanan |
|
3 |
11,41 Detik |
Sampai di Tujuan |
Telusur Kanan |
|
4 |
03,35 Detik |
Sampai di Tujuan |
Telusur Kiri |
|
5 |
03,79 Detik |
Sampai di Tujuan |
Telusur Kiri |
Percobaan pengujian dilakukan sebanyak 5 kali dan hasil pengujian dirangkum pada Tabel 10.
TABEL X
Hasil Pengujian pergerakan robot mobil percobaan 4
|
No |
Waktu Tempuh |
Akurasi Posisi |
Metode Telusur Robot |
|
1 |
09,13 Detik |
Sampai di Tujuan |
Telusur Kanan |
|
2 |
09,13 Detik |
Sampai di Tujuan |
Telusur Kanan |
|
3 |
10,22 Detik |
Sampai di Tujuan |
Telusur Kanan |
|
4 |
03,86 Detik |
Sampai di Tujuan |
Telusur Kiri |
|
5 |
03,94 Detik |
Sampai di Tujuan |
Telusur Kiri |
-
5) Hasil Pengujian Kelima: Pengujian akurasi posisi robot mobil percobaan 5 saat parkir di lintasan tanpa halangan dapat dilihat pada Gambar 34.

Gambar 34: Hasil pengujian percobaan mode otomatis 5
Percobaan pengujian dilakukan sebanyak 5 kali dan hasil pengujian dirangkum didalam Tabel 11.
TABEL XI
Hasil Pengujian pergerakan robot mobil percobaan 5
|
No |
Waktu Tempuh |
Akurasi Posisi |
Metode Telusur Robot |
|
1 |
04,18 Detik |
Sampai di Tujuan |
Telusur Kanan |
|
2 |
04,51 Detik |
Sampai di Tujuan |
Telusur Kanan |
|
3 |
04,24 Detik |
Sampai di Tujuan |
Telusur Kanan |
|
4 |
09,50 Detik |
Sampai di Tujuan |
Telusur Kiri |
|
5 |
08,30 Detik |
Sampai di Tujuan |
Telusur Kiri |
J. Hasil Pengujian Akurasi Posisi Robot
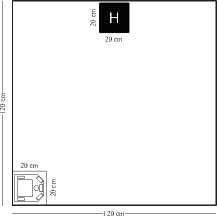
Pengujian akurasi posisi robot mobil dilakukan untuk mengetahui persentase kesalahan pada saat robot mobil mencari posisi parkir.
Parkir dianggap berhasil apabila robot sudah berada pada posisi titik hitam yang dianggap tempat parkir. Percobaan yang dilakukan sebanyak 35 kali pada lintasan yang digunakan untuk menguji akurasi posisi dari robot mobil ketika parkir.
Dari percobaan yang sudah dilakukan, dapat dicari persentase kesalahan gesekan pada saat robot mobil menelusuri ruangan, dari 35 kali percobaan, robot mobil berhasil mendapatkan posisi tanpa ada gesekan sebanyak 30 kali dan 5 kali mengalami gesekan kecil dengan persentase untuk terjadinya gesekan adalah adalah 14.28%.
Pergerakan robot pada saat simulasi pertama dan selanjutnya mengalami sedikit perbedaan pada saat robot berjalan, karena kecepatan putaran motor pada robot mobil dapat menjadi pengaruh didalam pergerakan motor DC pada robot mobil dalam menemukan tujuan parkir.
Hasil pengujian akurasi posisi robot mbil dapat dilihat pada Tabel 12.
TABEL XII
Pengujian akurasi posisi robot mobil dilakukan 35 percobaan
|
No |
Gesekan Tembok |
Posisi Parkir |
Posisi Lurus |
Metode Telusur |
|
1 |
Tidak Ada |
Dalam Posisi Parkir |
Lurus |
Kiri |
|
2 |
Tidak Ada |
Dalam Posisi Parkir |
Lurus |
Kiri |
|
3 |
Tidak Ada |
Dalam Posisi Parkir |
Lurus |
Kiri |
|
4 |
Tidak Ada |
Dalam Posisi Parkir |
Lurus |
Kiri |
|
5 |
Tidak Ada |
Dalam Posisi Parkir |
Lurus |
Kiri |
|
6 |
Tidak Ada |
Dalam Posisi Parkir |
Lurus |
Kiri |
|
7 |
Tidak Ada |
Dalam Posisi Parkir |
Lurus |
Kanan |
|
8 |
Tidak Ada |
Dalam Posisi Parkir |
Lurus |
Kanan |
|
9 |
Tidak Ada |
Dalam Posisi Parkir |
Lurus |
Kanan |
|
10 |
Tidak Ada |
Dalam Posisi Parkir |
Lurus |
Kanan |
|
11 |
Tidak Ada |
Dalam Posisi Parkir |
Lurus |
Kanan |
|
12 |
Tidak Ada |
Dalam Posisi Parkir |
Lurus |
Kanan |
|
13 |
Tidak Ada |
Dalam Posisi Parkir |
Lurus |
Kanan |
|
14 |
Tidak Ada |
Dalam Posisi Parkir |
Lurus |
Kanan |
|
15 |
Tidak Ada |
Dalam Posisi Parkir |
Lurus |
Kanan |
|
16 |
Tidak Ada |
Dalam Posisi Parkir |
Lurus |
Kanan |
|
17 |
Tidak Ada |
Dalam Posisi Parkir |
Lurus |
Kanan |
|
18 |
Tidak Ada |
Dalam Posisi Parkir |
Lurus |
Kanan |
|
19 |
Ada Gesekan |
Dalam Posisi Parkir |
Lurus |
Kanan |
|
20 |
Tidak Ada |
Dalam Posisi Parkir |
Lurus |
Kanan |
|
21 |
Tidak Ada |
Dalam Posisi Parkir |
Lurus |
Kanan |
|
22 |
Tidak Ada |
Dalam Posisi Parkir |
Lurus |
Kanan |
|
23 |
Tidak Ada |
Dalam Posisi Parkir |
Lurus |
Kanan |
|
24 |
Tidak Ada |
Dalam Posisi Parkir |
Lurus |
Kanan |
|
25 |
Ada Gesekan |
Dalam Posisi Parkir |
Lurus |
Kanan |
|
26 |
Tidak Ada |
Dalam Posisi Parkir |
Lurus |
Kanan |
|
27 |
Tidak Ada |
Dalam Posisi Parkir |
Lurus |
Kanan |
|
28 |
Ada Gesekan |
Diluar Posisi Parkir |
Tidak Lurus |
Kanan |
|
29 |
Ada Gesekan |
Dalam Posisi Parkir |
Lurus |
Kanan |
|
30 |
Tidak Ada |
Dalam Posisi Parkir |
Lurus |
Kanan |
|
31 |
Ada Gesekan |
Dalam Posisi Parkir |
Tidak Lurus |
Kanan |
|
32 |
Tidak Ada |
Dalam Posisi Parkir |
Lurus |
Kanan |
|
33 |
Tidak Ada |
Dalam Posisi Parkir |
Tidak Lurus |
Kanan |
|
34 |
Tidak Ada |
Dalam Posisi Parkir |
Tidak Lurus |
Kanan |
|
35 |
Ada Gesekan |
Dalam Posisi Parkir |
Lurus |
Kanan |
Dari percobaan yang sudah dilakukan, dapat dicari persentase kesalahan pada akurasi posisi parkir robot mobil, dari 35 kali percobaan, robot mobil berhasil mendapatkan posisi sebanyak 34 kali dan 1 kali melewati posisi tujuan dengan persentase untuk pencapaian posisi adalah 97.14%.
Untuk posisi akurasi robot mobil dalam keadaan lurus dapat dicapai sebanyak 31 kali dan 4 kali tidak lurus, dengan persentase akurasi posisi robot mobil adalah mencapai yaitu 88.57%.
Simpulan yang dapat diambil berdasarkan hasil pengujian dan pembahasan yang telah dilakukan adalah sebagai berikut. 1. Robot mobil sudah dapat di integrasikan terhadap
Smartphone melalui HC-05 yang terdapat pada ATmega32, komunikasi antara Robot Mobil dan Smartphone dilakukan dengan melakukan konfigurasi kristal dan baud rate pada program Basic Compiler AVR.
-
2. Pengintegrasian Atmega32 dengan sensor jarak dilakukan dengan memberikan sinyal pulsa high pada pin triger dari sensor untuk mengaktifkan sensor ultrasonik. Untuk menghitung lebar PWM sensor mengunakan timer0. Pin echo pulse output dari SRF04 terhubung dengan pin pada mikrokontroler. Ketika pin echo pulse output bernilai high maka timer0 aktif dan ketika pin echo kembali bernilai low maka timer0 dimatikan dan data TCNT0 diambil sebagai data jarak.
-
3. Pengintegrasian Atmega dengan Sensor Garis dengan fungsi ADC (Analog to Digital Converter) yang berfungsi untuk mengkodekan tegangan sinyal analog waktu kontinu ke bentuk sederetan bit digital waktu diskrit sehingga sinyal tersebut dapat diolah oleh Mikrokontroler ATmega32.
-
4. Pengintegrasian Atmega32 dengan Motor Driver dilakukan dengan mengatur PWM atau Pulse Width Modulation pada program Basic Sompiler, modulasi pada PWM dilakukan dengan cara merubah lebar pulsa dari suatu pulsa data. PWM mempunyai gelombang frekuensi yang tetap namun Duty-Cycle yang bervariasi antara 0%-100% dengan range 0 – 255 pada program.
-
5. Akurasi posisi robot mobil jika dikendalikan manual akan sesuai dengan kehendak user dan jika dijalankan secara mode otomatis hasil posisi lurus yang didapatkan 88.57% sesuai tujuan parkir.
Ucapan Terima Kasih
Ucapan terimakasih ditujukan kepada tim dosen pembimbing dari Jurusan Teknik Elektro dan Komputer Universitas Udayana dalam penyelesaian penelitian ini.
Referensi
-
[1] A, Winoto. 2008. Mikrokontroler AVR ATMega 8/32/16/8535 dan Pemrogramannnya dengan Bahasa C pada WinAVR. Bandung: Informatika.
-
[2] Adrianto, H. 2008. Pemrograman AVR ATmega16 Menggunakan Bahasa C (CodeVision AVR). Bandung : Informatika.
I Gede Pande Mastra Sedana:Sistem Kendali Otomatis Prototype ...
p-ISSN:1693 – 2951; e-ISSN: 2503-2372

-
[3] Anonim. 2016. DC IC L293D. www.elektronika-dasar.web.id/komponen/driver-motor-dc-l293d. Diakses tanggal 23 Februari 2016.
-
[4] Anwar, Salwin; Desmiwarman; Nazaruddin, Nazris. 2010. Pemakaian Remote Control Tv Dengan Menggunakan Mikrokontroler At89s51 Sebagai Alat Pemutus Dan Penghubung Tegangan Kwh Meter 1 Phasa. Elektron: Vol 2 No. 2.
-
[5] Ardika, I Komang. 2013. “Perancangan Sistem Kendali Mobile Robot Jarak Jauh Menggunakan Wireless Xbee-Pro Series1 60 Mw Berbasis Mikrokontroler ATmega32” (tugas akhir). Denpasar: Universitas Udayana.
-
[6] B.Ranga Raju. 2014. ARM7 Microcontroller based Robot controlled by an Android mobile utilizing Bluetooth, IJIRT Vol. 1 Issue 8.
-
[7] Mubarok, Fajar. 2015. “Pengembangan Media Pembelajaran Berbasis Mobile Application Menggunakan App Inventor Pada Mata Pelajaran Mekanika Teknik Untuk Siswa Kelas X Studi Keahlian Tgb Smk Negeri 3 Yogyakarta”. (tugas akhir). Yogyakarta: Universitas Negeri Yogyakarta.
-
[8] Pancev, I Gede Darko. 2014. “Implementasi Hand Motion Control Terhadap Pergerakan Quadcopter Robot Dengan Menggunakan Sensor Accelerometer ADXL335 Dan Wireless Xbee-Pro Series 1 60 mW Berbasis Mikrokontroler ATmega32”. (tugas akhir). Denpasar: Universitas Udayana.
-
[9] Pandiangan, Johannes. 2007. “Perancangan Dan Penggunaan Photodioda Sebagai Sensor Penghindar Dinding Pada Robot Forklift”. (tugas akhir). Medan: Universitas Sumatera Utara.
-
[10] Ritika P. 2014. Android Mobile Phone Controlled Bluetooth Robot Using 8051 Microcontroller . Vol. 2 Issue 7, July 2014
ISSN 1693 – 2951; e-ISSN: 2503-2372
I Gede Pande Mastra Sedana:Sistem Kendali Otomatis Prototype ...
Discussion and feedback