Sistem Pendeteksi Sampah Secara Realtime Menggunakan Metode YOLO
on
JNATIA Volume 2, Nomor 1, November 2023
Jurnal Nasional Teknologi Informasi dan Aplikasinya
p-ISSN: 2986-3929
Sistem Pendeteksi Sampah Secara Realtime Menggunakan Metode YOLO
Kadek Adi Priana, Anak Agung Istri Ngurah Eka Karyawati
aProgram Studi Informatika, Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Udayana, Bali
Jln. Raya Kampus UNUD, Bukit Jimbaran, Kuta Selatan, Badung, 08261, Bali, Indonesia 1adipriana430t@gmail.com
Abstract
At present, people’s daily garbage is increasing day by day. How to intelligently classify garbage can save manpower and improve work efficiency. In this paper, a garbage classification model is based on. First, according to the common daily garbage category, twelve typical kinds of garbage were selected, data cleaned, labeled, and constructed a garbage dataset. Second, YOLO was built and trained on our datasets. The experimental results show that YOLO can accurately identify the garbage’s types and find out the location of garbage.
Keywords: YOLO, Convolutional Neural Network, Sampah, object detection
Sampah merupakan permasalahan yang dihadapi setiap negara. Setiap tahun jumlah dan jenis sampah meningkat seiring dengan bertambahnya jumlah penduduk. Di Indonesia, pada tahun 1990, 220 juta pendudukan perkotaan menghasilkan kurang lebih 300.000-ton sampah per hari. Tahun 2000, 2.9 miliar orang yang tinggal di perkotaan menghasilkan 3 juta ton limbah sampah per hari. Pada tahun 2025 diperkirakan akan terus meningkat mencapai puluhan juta ton sampah per harinya [1]. Indonesia merupakan salah satu negara berkembang di Asia yang menyumbang sampah ke-2 didunia. Berdasarkan sumber berita, Indonesia merupakan negara penyumbang sampah plastik terbesar kedua didunia setelah negara Cina. Sebesar 80% atau 3.21 juta ton sampah plastik yang dibuang oleh masyarakat Indonesia dibuang menuju laut. Hal ini dapat menyebabkan pencemaran air yang berdampak banyaknya ikan keracunan sampah plastik. Seperti pada kasus pada tahun 2018, bangkai ikan paus ditemukan terdampar dan memiliki sampah plastik sebesar 6 kilogram di dalam perutnya. Selain itu, berdasarkan data SWI (Sustainable Waste Indonesia), Nagara Indonesia masih belum efektif dalam mengolah sampah. Sebesar 24% sampah Indonesia tidak dikelola, 7% sampah berhasil didaur ulang, dan 69% sampah berakhir di TPA (Tempat Pembuangan Akhir). Dengan sampah anorganik atau sampah yang sulit terurai sebesar 40%. Dengan perkembangan visi komputer dan teknologi deteksi objek, aplikasi pengenalan objek cerdas secara bertahap menjadi bagian dari kehidupan modern. Sejak itu convolutional neural network (CNN) telah banyak diterapkan di berbagai bidang, khususnya bidang computer vision. Di bidang deteksi objek, akurasi deteksi model CNN lebih baik daripada metode deteksi tradisional [2]. Berdasarkan uraian diatas, penulis melakukan penelitian terkait pendeteksian sampah secara realtime dengan menggunakan metode YOLO dimana bertujuan untuk mendeteksi sampah dengan cepat di suatu lingkungan melalui video sehingga dapat dilakukan penanggulangan dengan cepat. Adapun penelitian terkait pendeteksian sampah yaitu pertama penelitan oleh Stephen dkk. [3] dimana pada penelitian ini dilakukan pendeteksian sampah dan menentukan menentukan model CNN (Convolutional Neural Network) yang memiliki performa paling baik dalam memilah sampah dengan metode transfer learning menggunakan pre-trained model dari ImageNet dan hasil penelitian ini menunjukkan bahwa model CNN yang paling baik adalah Resnet 50. Nilai akurasi yang didapatkan dari train adalah 78% dan 90%. Selanjutnya ada penelitian oleh Figo Ramadhan [4] dimana pada penelitian ini dilakukan pengklasifikasian jenis sampah antara organik dan juga anorganik digunakan dengan metode YOLOV3. memiliki beberapa kelas yaitu apel, jeruk, pisang dan sayuran masuk kedalam jenis sampah organik serta kelas botol plastik, gelas plastik, dan kaleng masuk kedalam jenis sampah
anorganik. pengujian yang dilakukan adalah akurasi ketepatan sampah yang memiliki hasil paling kecil 80% dan paling besar 100% dan terakhir terdapat penelitian oleh Akbar dkk [5] dimana pada penelitian ini dirancang sebuah alat berbasis Internet of Things yang menggunakan NodeMCU ESP8266 sebagai mikrokontroler-nya untuk membedakan sampah organik dan anorganik menggunakan tiga sensor sekaligus, yakni sensor proximity infrared, Kapasitif dan Induktif. Data di baca oleh alat ini kemudian menyalakan LED sesuai jenis tempat sampah.
-
a. Jenis Penelitian
Jenis dari penelitian ini adalah penelitian eksperimental. Penelitian eksperimental merupakan penelitian yang dilakukan untuk mengetahui pengaruh pemberian suatu treatment atau perlakuan terhadap subjek penelitian Penelitian ini berjenis eksperimental karena objek yang diteliti diproses melalui suatu eksperimen yang menggunakan algoritma Convolutional Neural Network (CNN).
-
b. Data yang digunakan
Dalam pembangunan jaringan untuk sistem pendeteksi dan pengindentifikasi sampah ini, saya menggunakan dataset yang saya ambil pada situs Kaggle.com yaitu Garbage Classification dimana merupakan kumpulan data berupa gambar sampah yang dikelompokkan menjadi 12 kelas yaitu baterai, sampah organik, gelas coklat, karton, pakaian, gelas hijau, logam, kertas, plastik, sepatu, sampah, dan gelas putih/bening. jumlah dataset keseluruhan yaitu 15.150 data gambar (945 data baterai, 985 data sampah organik, 607 data gelas coklat, 891 data karton, 5325 data pakaian, 629 data gelas hijau, 769 data logam, 1050 data kertas, 865 data plastik, 1977 data sepatu, 697 data sampah, dan 775 data gelas putih/bening).
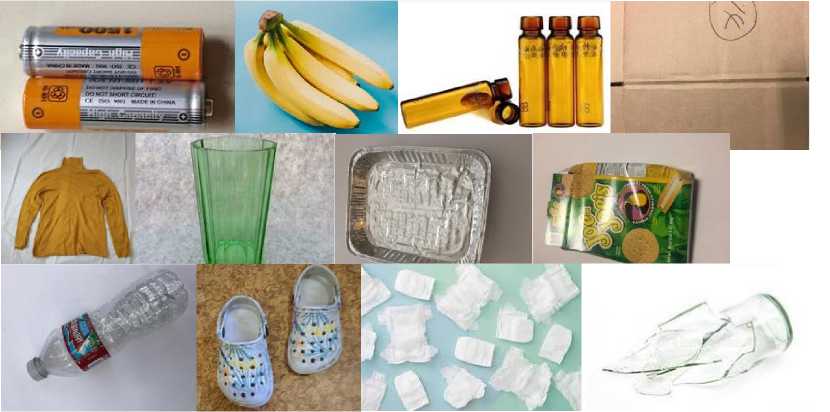
Gambar 1. Dataset Garbage Classification 12 Class
-
c. Alur Sistem
Alur sistem pada penelitian ini ditunjukkan pada gambar dibawah ini, dimana pertama kamera menangkap objek sampah lalu melalui pembersihan dan pelabelan data, dataset dibangun, lalu setelah training, Model YOLO sudah didapatkan untuk pendeteksi sampah.
Deteksi Objek Sampah
Deteksi Objek Sampah
Training Model Yolo
Deploy
Gambar 2. Alur Sistem
-
d. YOLO algoritma pendeteksi objek.
You Only Look Once (YOLO) mengusulkan menggunakan jaringan saraf end-to-end yang membuat prediksi kotak pembatas dan probabilitas kelas sekaligus. Ini berbeda dari pendekatan yang diambil oleh algoritma deteksi objek sebelumnya, yang menggunakan kembali pengklasifikasi untuk melakukan deteksi. Cara kerja dari YOLO yaitu algoritma YOLO menerima gambar sebagai input lalu menggunakan Deep CNN yang sederhana untuk mendeteksi gambar. Berikut adalah arsitektur dari CNN yang menunjukkan kerangka dari YOLO.
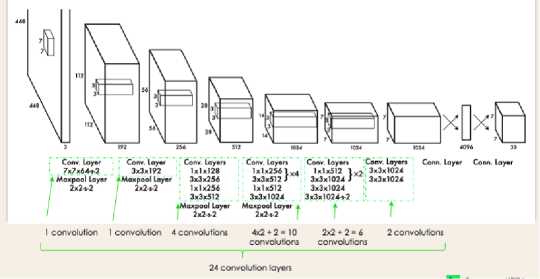
Gambar 3. Arsitektur YOLO
Cara Kerja Architecture sebagai berikut
-
• Mengubah ukuran gambar input menjadi 448x448 sebelum melalui jaringan
konvolusional.
-
• Konvolusi 1x1 pertama kali diterapkan untuk mengurangi jumlah saluran, yang
kemudian diikuti oleh konvolusi 3x3 untuk menghasilkan output kuboid.
-
• Fungsi aktivasi di bawah tenda adalah ReLU (rectified linear unit), kecuali lapisan
terakhir, yang menggunakan fungsi aktivasi linier.
-
• Beberapa teknik tambahan, seperti normalisasi batch dan dropout, masing-masing
mengatur model dan mencegah overfitting.
-
a. Lingkungan Eksperimen
Sistem merupakan windows 11 dengan PyTorch 2.0 dan menggunakan CPU Intel i5-10300h @2.50GHz with 8Gb memory and GPU menggunakan NVIDIA Geforce GTX 1650.
-
b. Datasets
Saya menggunakan dataset gambar sampah dengan 12 kategori seperti yang dijelaskan sebelumnya dan dataset secara acak dibagi menjadi 550 gambar di dalam training set dan 50 gambar untuk validation set.
-
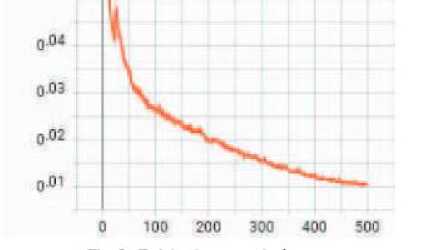
c. Proses training
Jumlah dari epoch adalah 500, fungsi curva training loss ditunjukkan pada gambar 4 dan fungsi curva validation loss ditunjukkan pada gambar 5. Dengan meningkatnya jumlah epoch, curva loss stabil secara bertahap, dimana mengindikasi bahwa model training effect membaik
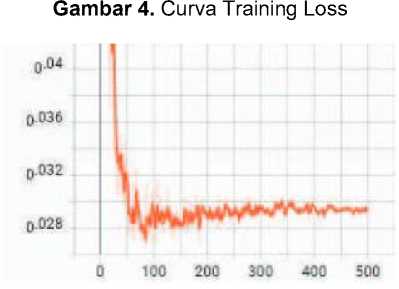
Gambar 5. Curva Validation Loss
-
d. Model Measurement
Tabel I. adalah data evaluasi dari setiap indeks setelah pelatihan model, yang diperoleh setelah data dibulatkan dan dibulatkan dengan menjaganya hingga dua tempat desimal. Terlihat bahwa mAP (IoU[0.5]), mAP (IoU [0.5: 0.95]), Recall dan Precision dari model klasifikasi sampah masing-masing mencapai 99.59%, 64.70%, 100% dan 99.86%.
Table 1. Evaluasi Model
|
Indikator Evaluasi |
Model Presisi |
|
MAP (IoU[0.5])/% |
99.59 - |
|
MAP (IoU[0.5:0.95]) /% |
64.70 - |
|
Recall/% |
100 - |
|
Presisi/% |
99.86 - |
-
e. Efek Eksperimen
Gambar uji baterai, kulit jeruk, kertas bekas, cangkir kertas, dan botol ditunjukkan pada Gambar 10. Seperti ditunjukkan pada Gambar 10(a). Terlihat bahwa GC-YOLOv5 berhasil mengklasifikasikan dan mengidentifikasi baterai dari berbagai merek, ukuran, dan warna. Untuk sampah botol, GC-YOLOv5 berhasil mengidentifikasi botol dalam adegan nyata dan virtual, dan hasil pendeteksiannya
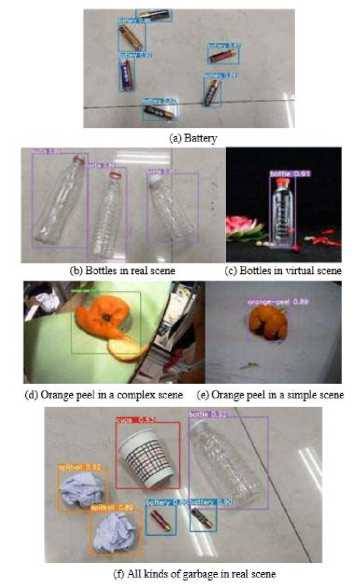
Gambar 6. Hasil Pendeteksian Model YOLO
Penelitian ini mengimplementasikan model klasifikasi sampah berdasarkan deep learning. Model klasifikasi sampah berdasarkan jaringan deteksi objek YOLO bernama YOLO dirancang. Pertama, menurut kategori sampah harian umum, lima jenis sampah dipilih, data dibersihkan, diberi label, dan dibuat kumpulan data sampah. Selanjutnya, YOLO dibangun dan dilatih pada kumpulan dataset. Hasil percobaan menunjukkan bahwa akurasi rata-rata mAP lebih dari 99%. Ingat dan Presisi mendekati 100%. Dalam adegan nyata, model tersebut digunakan, dan hasil pengujian menunjukkan bahwa model klasifikasi sampah ini dapat secara akurat mengidentifikasi semua jenis sampah, dan mencapai akurasi deteksi yang tinggi, tingkat akurasi dapat mencapai lebih dari 80%. Secara real time melalui Internet untuk mewujudkan penyimpanan data cloud, dan data deteksi dan Model ini telah diuji berkali-kali, dan akurasi serta performa waktu nyatanya dapat memenuhi persyaratan. Model klasifikasi sampah ini memiliki signifikansi ilmiah dan teknik tertentu untuk pekerjaan klasifikasi sampah saat ini
Daftar Pustaka
-
[1] M. F. Rahman e Bambang, “Deteksi Sampah pada Real-time Video Menggunakan Metode Faster R-CNN,” Applied Technology and Computing Science Journal, vol. 3, nº 2, pp. 117125, 2021.
-
[2] Z. Wu, D. Zhang e a. Shao, “Using YOLOv5 for Garbage Classification” the 4th International COnference on Pattern Recognition and Artificial Intelligence, pp. 35 - 38, 2021.
-
[3] Stephen, Raymond e H. Santoso, “Aplikasi Convolution Neural Network Untuk Mendeteksi Jenis-Jenis Sampah,” Explore – Jurnal Sistem Informasi dan Telematika, vol. 10, nº 2, pp. 122 - 132, 2019.
-
[4] F. R. Hendri e F. Utaminingrum, “Rancang Bangun Sistem Pengklasifikasi Jenis Sampah Organik dan Anorganik menggunakan metode You Only Look Once versi 3 berbasis Raspberry Pi,” Jurnal Pengembangan Teknologi Informasi dan Ilmu Komputer, vol. 6, nº 7, pp. 3509 - 3514, 2022.
-
[5] M. Akbar, S. D. Anjasmara e K. D. K. Wardhan, “Rancang Bangun Alat Pendeteksi Sampah Organik dan Anorganik Menggunakan Sensor Proximity dan NodeMCU ESP8266,” Jurnal Komputer Terapan, vol. 7, nº 2, pp. 290 - 299, 2021.
36
Discussion and feedback