Pemetaan Habitat Bentik Menggunakan Citra Sentinel-2A dan Unmanned Aerial Vehicle (UAV) di Perairan Pemuteran, Bali
on
JMRT, Volume 5 No. 1 Tahun 2022, Halaman: 29-39
JMRT
JOURNAL OF MARINE RESEARCH AND TECHNOLOGY journal homepage: https://ojs.unud.ac.id/index.php/JMRT ISSN: 2621 -0096 ( electronic); 2621 -0088 (print)
Pemetaan Habitat Bentik Menggunakan Citra Sentinel-2A dan
Unmanned Aerial Vehicle (UAV) di Perairan Pemuteran, Bali
Elvita Rahmani a, I Wayan Gede Astawa Karang a,b*, I Dewa Nyoman Nurweda Putra a
aProgram Studi Ilmu Kelautan, Fakultas Kelautan dan Perikanan, Universitas Udayana, Bali, Indonesia
bCenter for Remote Sensing and Ocean Sciences (CReSOS), Universitas Udayana, Bali, Indonesia
*Corresponding author, email:gedekarang@unud.ac.id
ARTICLE INFO abstract
Article history:
Received: Juny 4th 2021
Received in revised form: July 4th 2021
Accepted: December 6th 2021
Available online: February 28th 2022
Keywords:
Benthic Habitat
Sentinel-2A Imagery
Unmanned Aerial Vehicle (UAV)
Pemuteran, Bali
The benthic habitat has a huge ecological and economic role in the sustainability of the coastal environment and is vulnerable to change. The importance of the existence of the benthic habitat requires identification and monitoring of the habitat's existence and status. One of the technologies that can be utilized is remote sensing technology, which is able to provide solutions to the limitations of conventional methods, such as time that is relatively long, costly, and difficult to reach remote and risky areas. Selection of sensing vehicles takes into consideration the needs and desired qualities because the sensors brought in to detect habitats have different abilities. Sentinel-2A imagery is an open-source satellite with a 10 m spatial resolution capability, while the image from Unmanned Aerial Vehicle (UAV) has a high spatial resolution of up to 1 cm per pixsel depending on flight level. The purpose of this study is to identify the degree of accuracy and the scattered conditions of the benthic habitat by the sentinel-2A imagery and the UAV imagery in mapping the benthic habitat in the shallow waters of Pemuteran. The two images for classification use classification based objects and accuracy tests using the confusion matrix method. Based on field observations, five kinds of habitat composition with vast dead corals, dead coral, rubble, biorock, sand, and stone sand are 13.63 ha, 1.45 ha, 0.87 ha, 6.05 ha, and 1.67 ha on the sentinel-2A imagery and 12.86 ha, 1.54 ha, 0.18 ha, 7.32 ha, and 1.76 ha on the UAV imagery. The Sentinel-2a's imagery capability in mapping the benthic habitat is adopted by 73.95%, whereas the UAV imagery is 81.51%. The value of accuracy obtained in the study shows the use of remote sensing data using both imagery can be used for the mapping of habitat benthic.
2022 jmrt. all rights reserved.
Pesisir merupakan salah satu wilayah yang mempunyai tingkat produktivitas tinggi karena terdapat ekosistem mangrove, lamun, dan terumbu karang yang memberikan produk dan jasa lingkungan yang tinggi untuk makhuk hidup (LIPI, 2014). Ketiga ekosistem tersebut termasuk habitat bentik karena merupakan lingkungan tempat hidup bagi organisme perairan yang berfungsi sebagai plasma nutfah dan biodiversitas laut (BIG, 2017). Indonesia juga menjadi bagian dari wilayah segitiga karang dunia karena tercatat memiliki sekitar 569 spesies (69%) dan 83 genus (76%) yang tercatat mewakili karang batu di seluruh dunia (Hadi et al., 2019).
Ekosistem habitat bentik memiliki banyak peran ekologi dan sosial ekonomi namun rentan terhadap perubahan. Pada tahun 2015-2016 terjadi peningkatan suhu permukaan laut yang berdampak pada degradasi terumbu karang yang memiliki sensitivitas tinggi (Fajar, 2018). Sekitar 35% hingga 42% intensitas pemutihan pada karang dengan geografis disebabkan oleh naiknya suhu di permukaan laut sekitar 0.1ºC (McWilliams et al., 2005). Penurunan laju pertumbuhan karang karena stress pada karang yang disebabkan oleh sedimentasi, penyakit, dan perubahan suhu jika berlangsung lama dapat menyebabkan kematian.
Salah satu habitat terumbu karang yang terdampak oleh perubahan lingkungan adalah di Desa Pemuteran, Bali. Pada awal tahun 2017 terjadi sedimentasi lumpur yang tinggi akibat banjir di
Desa Pemuteran yang juga menjadi penyebab degradasi ekosistem terumbu karang (Mustafa, 2017). Pada tahun 2016 terjadi fenomena El Nino yang kuat dimana fenomena tersebut menyebabkan kenaikan suhu muka air laut yang memicu pemutihan terumbu karang di seluruh dunia (Ampou et al., 2017). Kenaikan suhu permukaan air laut yang terus meningkat setiap tahun akibat pemanasan global menyebabkan pada Mei 2020 kembali terjadi pemutihan terumbu karang di kawasan biorock Pemuteran (Goreau, 2020). Perairan Pemuteran merupakan salah satu wilayah perairan yang mempunyai terumbu karang alami dan dikenal dengan terumbu karang hasil teknologi biorock sehingga mengalami perkembangan pariwisata bahari yang pesat (Twinandia et al., 2011). Informasi mengenai keberadaan dan status habitat bentik penting untuk diketahui karena memiliki peran ekologi dan sosial ekonomi terhadap pengelolaan keberlanjutan lingkungan pesisir yang lestari (Hadi et al., 2018).
Salah satu metode untuk mengumpulkan data dengan hasil efektif dan efisien adalah dengan menggunakan metode teknologi penginderaan jauh (Setiawan et al., 2014). Kemampuan sensor penginderaan jauh dapat digunakan untuk proses pendeteksian berbagai macam ekosistem di perairan laut dangkal (Siregar, 2010). Analisis digital atau klasifikasi yang biasanya digunakan pada pemanfaatan terhadap data penginderaan jauh guna memetakan berbagai habitat bentik yang hidup di dalam perairan dangkal umumnya dibagi menjadi dua, yaitu pixel-based atau berdasar piksel dan objectbased atau berdasar objek (Mastu, 2018).
Sumber data penginderaan jauh bervariasi seperti citra foto yaitu foto udara dan non-foto yaitu citra satelit. Citra Sentinel-2 merupakan citra satelit dengan 13 kanal spektral open source yang memiliki resolusi sedang dengan jangkauan yang lebar dan revisit dilokasi yang tidak pernah berbeda setiap harinya, sehingga memadai untuk digunakan dalam kajian monitoring. Karang et al., 2019 memvisualkan habitat dasar bentik dengan memanfaatkan citra dengan Landsat 8 yaitu pada tingkat akurasi overall accuracy sekitar 68.29% serta pada akurasi kappa sekitar 35.43%. Sedangkan pemanfaatan citra Sentinel-2A mengalami peningkatan akurasi dengan peningkatan overall accuracy yaitu 80% dan peningkatan akurasi kappa 59.27%. Akurasi kappa sangat dianjurkan saat hendak menghitung akurasi, karena hasil dari uji akurasi keseluruhan menunjukkan over estimate (Jaya, 2010).
Unmanned Aerial Vehicle (UAV) merupakan wahana yang dapat digunakan dalam pengambilan data foto udara yang memiliki keunggulan biaya yang murah dan mudah diperoleh, memiliki GPS (Global Positioning System), perolehan data yang cepat, dapat merencanakan penerbangan secara mandiri dengan menyesuaikan kondisi cuaca yang sedang terjadi dan menghasilkan data resolusi spasial yang tinggi (Rango et al. 2006). Penggunaan UAV juga lebih fleksibel karena dapat waktu dan tempat pengambilan data dapat disesuaikan dengan kebutuhan data dari pengguna UAV itu sendiri. Umumnya sensor UAV memiliki resolusi spektral yang masih tergolong rendah, namun hal ini diimbangi dengan kemampuan UAV dalam menghasilkan data resolusi spasial yang sangat tinggi (Ramadhani et al. 2015).
Tahapan ekstraksi habibat laut yang dangkal dilakukan oleh Purwanto et al., 2019 dengan memanfaatkan data penginderaan jarak jauh, tepatnya di Pantai Pemuteran dengan hasil perhitungan luasan hasil klasifikasi ekosistem terumbu karang dengan memakai citra satelit Landsat-8 metode unsupervised dengan algoritma Lyzenga, 1981 dan Lyzenga, 2006 adalah 89.47 ha dan 78.70 ha. Maksum et al., 2016 melakukan perbandingan pada metode dengan berbasis objek dan piksel untuk klasifikasi tutupan lahan dengan citra resolusi tinggi (Quickbird) dan citra resolusi menengah (Landsat 8) dengan hasil akurasi keseluruhan klasifikasi menggunakan metode berbasis objek pada citra Quickbird sebesar 87.14% dan citra Landsat sebesar 77.14%. Sedangkan hasil akurasi keseluruhan klasifikasi menggunakan metode berbasis piksel pada citra Quickbird sebesar 82.85% dan citra Landsat sebesar 75.71%.
Berdasarkan hal tersebut, perlu dilakukan penelitian mengenai pemetaan habitat bentik di perairan Pemuteran menggunakan Citra Sentinel-2A yang memiliki resolusi spektral dan cakupan lebar dan citra foto udara menggunakan UAV dengan resolusi spasial yang tinggi. Metode klasifikasi yang digunakan adalah metode supervised berbasis objek karena mendapatkan informasi mengenai training sample di lapangan sehingga dapat meningkatkan keakuratan dalam proses klasifikasi. Klasifikasi berbasis objek dapat digunakan untuk mengatasi kekurangan klasifikasi berbasis piksel yang hasilnya terdapat efek salt and papper (Parsa, 2013) dan objeknya tidak terbatas pada satu piksel tetapi berupa segmen berupa kelompok piksel yang memiliki karakteristik spektral (ukuran, bentuk, dan warna) yang mirip. Tujuan dari dillakukannya penelitian ini yaitu untuk mengetahui tingkat pada akurasi penggunaan citra Sentinel-2A dan citra UAV dalam memetakan habitat bentik di perairan dangkal Pemuteran dan untuk mengetahui kondisi sebaran habitat bentik menggunakan citra Sentinel-2A dan citra UAV di perairan dangkal Pemuteran.
Penelitian dilakukan tepatnya di perairan dangkal yang terdapat di Pemuteran, di Kecamatan Gerokgak, Kabupaten Buleleng, Provinsi Bali. Pengumpulan data lapangan dilaksanakan pada 5-6 April 2021. Pengolahan dan analisis data dilakukan pada Maret - Juli 2021 di Laboratorium Hidroinformatika, merupakan Pusat Penelitian Limnologi Lembaga Ilmu Pengetahuan Indonesia, Bogor, Jawa Barat. Lokasi penelitian bisa di lihat pada peta dalam Gambar 1.

Gambar 1. Peta Lokasi Penelitian
-
2.2. Alat dan Bahan
Penelitian ini dilakukan dengan menggunakan alat berupa perangkat keras, perangkat lunak untuk pengolahan data, serta peralatan lainnya yang dibutuhkan di lapangan guna mengumpulkan data yang mendukung penelitian. Perangkat keras atau hardware yang dimanfaatkan dalam pengolahan data yaitu berupa komputer dengan RAM 16 GB, serta perangkat lunak yang dimanfaatkan dalam penelitian yaitu Software Pix4D, Software Agisoft Metashape, Software ArcMap, Sofware QGIS dan Software eCognition. Pengambilan data di lapangan menggunakan beberapa peralatan seperti GPS Handheld, GPS Geodetik CHC i50 RTK, drone type Mavic 2 Pro, tali raffia, dan alat dasar selam. Penelitian dilakukan dengan menggunakan bahan yaitu berupa data sekunder yaitu Peta Wilayah oleh BIG serta data primer yaitu citra satelit Sentinel-2A dan citra UAV (orthomosaic). Citra Sentinel-2A Level 2A yang dipakai adalah akuisisi pada tanggal 25 April 2021 diperoleh dari website ESA Copernicus yaitu https://scihub.copernicus.eu/dhus/#/home .
-
2.3. Diagram Alir Penelitian
Penelitian ini meliputih lima tahapan yaitu tahapan akuisisi data, ortofoto digital citra UAV, pengolahan data citra satelit, klasifikasi citra, dan uji akurasi. Diagram alir disajikan pada pada Gambar 2.

Gambar 2. Diagram Alir Penelitian
-
2.4. Metode Survei
Metode stratified random sampling digunakan untuk mengumpulkan data secara in situ dengan cara mengambil sampel dan mengingat populasinya heterogen, proses pemilihan sampel pun dilakukan secara acak dari setiap strata (Akdon dan Hadi, 2004). Pemantauan objek dasar perairan laut dengan cepat dan tepat yang bisa digunakan untuk validasi dapat dilakukan dengan metode survei stop and go.
Penentuan titik permulaan metode ini berdasarkan keragaman kelas habitat. Saat titik awal telah ditentukan, surveyor segera melakukan tugasnya, yaitu snorkeling dan mencatat posisi dalam GPS serta kelas habitat dengan selang waktu atau jarak tertentu yang sudah ditentukan, sekitar 1-3 menit atau 10 meter yang dijelaksan pada Gambar 3 (BIG, 2014). Titik koordinat yang diambil akan dijadikan sebagai acuan untuk training sample area pada proses klasifikasi citra dan sebagiannya digunakan sebagai data sebagai bahan untuk menguji akurasi dari hasil klasifikasi citra.
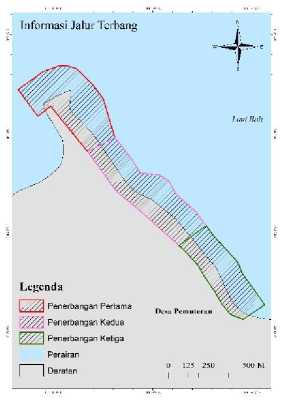
Gambar 4. Informasi Jalur Terbang
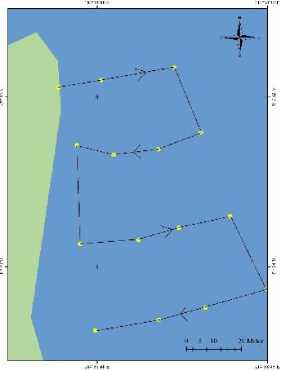
Gambar 3. Metode Stop and Go
Pengambilan data primer untuk foto udara menggunakan GCP (Ground Control Point) merupakan suatu proses rektifikasi yang digunakan sebagai peningkat akurasi dari peta yang didapatkan saat foto udara. Proses tersebut dimulai dengan penandaan lokasi yang berkoordinat sebesar jumlah titik yang diperlukan untuk mengoreksi dan memperbaiki suatu data. Dalam penelitian ini dilakukan pemasangan enam titik GCP menggunakan GPS Geodetik tipe CHC i50 RTK sepanjang area penelitian. Faktor yang harus diperhatikan dalam penelitian ini adalah kondisi perairan dan cuaca di lokasi penelitian. Proses akuisisi foto udara pada penelitian ini dilakukan dengan pertimbangan situasi pasang surut dimana kondisi yang dipilih yaitu saat sedang surut, perairan yang tidak berarus ataupun berombak, dan intensitas cahaya matahari yang cukup untuk penetrasi ke objek dasar perairan dangkal. Waktu akuisisi foto udara yang disarankan adalah pada 08.00-11.00 dan 13.00-16.00 (BPN, 2017). Pada penelitian ini proses akuisisi foto udara dilakukan pada jam 10.18-11.48 WITA.
Akuisisi foto udara pada penelitian ini menggunakan UAV tipe DJI Mavic 2 Pro dengan resolusi kamera 20 megapixel dan pembuatan jalur terbang menggunakan aplikasi Pix4D. Parameter pemetaan dalam proses akuisisi foto udara yaitu dengan 100 m ketinggian terbang, 80% overlap, dan kecepatan maksimal 7 m/s. Resolusi spasial citra atau GSD (Ground Sampling Distance) yang diinginkan dapat disesuaikan dengan tinggi terbang. Untuk cakupan area disesuaikan dengan lokasi penelitian perairan dangkal. Penerbangan dilakukan sebanyak tiga kali dengan peta informasi penerbangan seperti pada Gambar 4 dan detail informasi penerbangan dapat dilihat pada Tabel 1.
Tabel 1. Detail Informasi Penerbangan
|
Penerbangan |
1 |
2 |
3 |
|
Tanggal |
6 April 2021 |
6 April 2021 |
6 April 2021 |
|
Waktu |
10:18 WITA |
10:51 WITA |
11:48 WITA |
|
Dimensi |
630 m x 616 m |
731 m x 655 m |
503 m x 609 m |
|
Overlap |
80% |
80% |
80% |
|
Altitude |
100 m |
100 m |
100 m |
|
Jumlah Foto |
323 |
343 |
247 |
|
Panjang Jalur |
5736 m |
5843 m |
4409 m |
|
Lama Terbang |
16 menit |
17 menit |
13 menit |
-
2.5. Ortofoto Digital
Penggabungan foto hasil perekaman dari UAV dilakukan dengan Agisoft Metashape, perangkat lunak ini menggunakan metode dari cabang computer vision, yaitu Structure from Motion (SfM). SfM digunakan dengan tujuan untuk rekonstruksi blok foto udara yang akan menghasilkan Digital Surface Model (DSM) dan juga mosaic berbentuk foto (Meiarti et al., 2019). Pada tahap ini semua foto udara hasil akuisisi dengan menggunakan UAV di lokasi studi dilakukan orthomosaic atau menggabungkan beberapa foto dengan untuk selanjutnya menghasilkan citra orthofoto atau citra UAV. Tahapan proses orthomosaic foto udara adalah: (1) Add photo; (2) Align photo; (3) Optimize camera alignment; (4) Build dense cloud; (5) Build mesh; (6) Build texture; (7) Build DSM; (8) Building orthomosaic; dan (9) Export orthomosaic.
Menurut Mastu (2018) Align photo adalah proses penyesuaian posisi dan orientasi kamera tiap foto serta membangun model point cloud; Optimize camera alignment adalah mengoptimalkan akurasi parameter kamera dan memperbaiki adanya distorsi pada foto; Build dense cloud adalah penggabungan tiap foto menjadi point cloud tunggal yang padat berdasarkan perkiraan posisi kamera; Build mesh menghubungkan permukaan tiap foto berdasarkan point cloud yang padat atau berlubang; Build texture adalah pembentukan tekstur dan warna objek sesuai foto; Build DSM untuk membangun model elevasi digital; Building orthomosaic pembentukan citra foto.
-
2.6. Pra-Pengolahan Citra
Komposisi beberapa kanal yang digabungkan dengan citra akan memperoleh pewarnaan RGB (Red-Green-Blue) agar dapat terlihat alami. Pada penelitian ini menggunakan komposit citra warna asli (true color composite). Pada citra Sentinel-2A
kanal red adalah kanal 2, kanal green adalah kanal 3, dan kanal blue adalah kanal 2. Menurut BIG (2014) komposit yang disarankan untuk mengidentifikasi habitat perairan yang dangkal yaitu komposit warna asli (true color composite) karena memiliki penetrasi dengan bagus ke dalam air. Komposit warna asli juga memiliki kelemahannya sendiri, yaitu tingginya tingkat gangguan atmosferik. Tahap pra-pengolahan citra Sentinel-2A level 2A dan citra UAV terdiri dari cropping. Proses cropping citra untuk membatasi wilayah penelitian agar ukuran data mengecil sehingga mempercepat proses pengolahan data. Batasan area penelitian ini mengacu pada Peta Wilayah yang diterbitkan oleh BIG dan hasil orthomosaic.
-
2.7. Pengolahan Citra Sentinel-2A
Pada penelitian ini digunakan algoritma lyzenga atau metode Depth Invariant Index (DII) merupakan salah satu bentuk algoritma yang digunakan pada citra untuk memeriksa kolom air (persamaan 2). Prinsip algoritma lyzenga 1981 menggunakan kombinasi saluran cahaya tampak dari citra satelit. Pengolahan data dilakukan dalam perangkat lunak ArcGIS.
DII = (In LQ — (K^n Lj)
kJ
(2)
Dimana:
Li = nilai reflektan kanal i
Lj = nilai reflektan kanal j
ki/kj = rasio koefisien atenuasi kanal biru dan hijau
Algoritma lyzenga dipakai untuk menganalisis data citra satelit dengan terlebih dahulu mencari koefisien atenuasi menggunakan software Microsoft Excel. Koefisien atenuasi yang berdasarkan pada penghitungan varian dan kovarian digunakan dalam penajaman terumbu karang (ki/kj). Nilai ki/kj (persamaan 3) diperoleh dengan syarat nilai α nilai yang diperoleh dari ekstrasi nilai digital, yaitu pada kanal i dan kanal j terletak diposisi geografis yang sama dengan pengambilan sampel (training sample area) yaitu terdapat pada bentuk point yang diperoleh pada area perairan dangkal. Kovarian training sample area dan nilai varian untuk kanal i dan kanal j. Nilai α dan rasio koefisien atenuasi (ki/kj) akan dihasilkan dengan melakukan perhitungan metode statistik seperti pada persamaan 3 dan 4.
Kl i---------
— = α + √α2 + 1 Kj
(all — a]]) a =-------
(Iaij)
Keterangan : a= nilai slope aii = varian kanal i ajj = varian kanal j aij = kovarian kanal i dan kanal j
-
2.8. Klasifikasi Citra
(3)
(4)
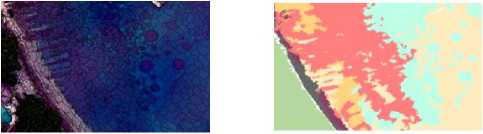
Pada penelitian ini, untuk klasifikasi citra Sentinel-2A dan citra UAV menggunakan klasifikasi berbasis objek yaitu melalui proses pembagian segmentasi atau analisis objek ataupun klasifikasi citra yang didasari oleh spektral dan karakteristik spasial yang dapat dilihat pada Gambar 5 dengan menggunakan metode klasifikasi sehingga dihasilkan suatu objek citra ataupun berbagai segmen dan berikutnya akan dimanfaatkan di dalam klasifikasi (Wang et al. 2004; Blaschke, 2010; Mastu, 2018). Proses klasifikasi citra dilakukan pada software eCognition.
A B
Keterangan A. Segmentasi; B. Klasifikasi Jenis.
Gambar 5. Proses Klasifikasi Berbasis Objek
-
a. Segmentasi merupakan proses yang membagi suatu citra kedalam beberapa bagian atau objek. Pada penelitian ini digunakan algoritma multiresolution segmentation (MRS). Tahapan awal dimulai dengan penggabungan pada segmen tetangga (neighboring segments) dan piksel tunggal sampai dengan ambang batas (threshold) sehingga tercapainya heterogenitas. Dalam pembagian algoritma MRS, terdapat 3 parameter yang mempunyai peran sangat penting, terdiri dari scale, shape, dan compactness (Mastu, 2018). Scale merupakan parameter yang digunakan dalam pengaturan ukuran sebuah objek yang akan disesuaikan oleh para pengguna berdasarkan kedetailan. Shape merupakan parameter yang digunakan untuk pengaturan pada homogenitas spektral dan bentukan objek yang mempunyai hubungan dengan nilai digital dengan pengaruh dari warna. Parameter Compactness memiliki fungsi pengoptimalan serasi atau penyeimbang, serta kehalusan sebuah objek guna penentuan objek tepi kompak dengan objek antar batas. Rentang nilai yang diterapkan pada parameter shape dan compactness adalah 0-1. Dalam klasifikasi objek, standar nilai parameter tidak memiliki ketentuan yang baku (Benfield et al., 2007; Phinn et al., 2011; Trimble 2014). Hingga dengan saat ini belum terdapat teori yang menjelaskan mengenai parameter dengan segmentasi terbaik yang mewajibkan kepada para pengguna mencari secara mandiri parameter segmentasi yang lebih baik pada setiap level dengan menggunakan metode try and error (Blaschke dan Hay, 2001; Burnett dan Blaschke, 2003; Anggoro et al., 2017). Pada penelitian ini, untuk citra sentinel-2A skala segmentasi adalah 2 sedangkan pada citra UAV skala segmentasi yang digunakan adalah 100. Sedangkan untuk nilai shape dan compactness menggunakan aturan nilai tetap yaitu 0.1 dan 0.5.
-
b. Klasifikasi citra, adalah bentuk dari klasifikasi terbimbing dengan memakai algoritma machine learning yaitu SVM yang terdapat pada klasifikasi jenis. Klasifikasi citra memanfaatkan algoritma yang ada di dalam software eCognition. Algoritma tersebut berperan dalam pohon proses (process tree) untuk proses pembangunan suatu aturan (rule set) yang pemanfaatannya disesuaikan dengan kebutuhan pengguna. Process tree menampilkan semua proses yang dibuat atau dijalankan. Telah dijelaskan bahwa rule set adalah istilah yang digunakan untuk proses pengklasifikasian objek melalui sekumpulan algoritma ke dalam berbagai kelas (Anggoro, 2015; Anggoro et al., 2017). Dalam klasifikasi tipe pengklasifikasian digunakan melalui implementasi algoritma klasifikasi SVM dengan training area yang didapatkan berdasarkan data lapangan guna mengklasifikasikan kelas habitat (Mastu, 2018). Input feature pada proses klasifikasi menggunakan classifier pada citra Sentinel-2A menggunakan nilai layer (mean dan standar deviasi) dari kanal biru, hijau, dan merah serta hasil citra transformasi (koreksi kolom perairan) dari ketiga pasangan kanal. Pada citra UAV input feature yang digunakan adalah nilai layer (mean dan standar deviasi) dari kanal merah, hijau, dan biru serta nilai transformasi Hue, Intensity, Saturation (HSI) dari kanal merah, hijau, dan biru.
c. Algoritma klasifikasi, menurut (Mastu, 2018) klasifikasi terbimbing yang dapat menemukan vektor atau garis untuk proses pemisahan menjadi dua kelas. Adapun tujuan dari pemisahan dua kelas yaitu agar margin antar kelas dapat dimaksimalkan. Algoritma klasifikasi didasarkan pada prinsip yang termasuk golongan klasifikasi machine learning, yaitu prinsip linear classfier. Pemaparan Konsep dari SVM dengan cara yang sederhana, yaitu pencarian hyperplane terbaik yang digunakan pada pemisahan dua kelas yang terdapat pada input space (Nugroho et al., 2003). Hyperplane merupakan pemisah kelas berbentuk garis lurus atau bidang datar (Zhu and Blumberg 2002). Mengukur margin hyperplane merupakan cara yang dapat digunakan untuk menemukan hyperplane terbaik dengan mencari titik dari maksimal berikutnya. Margin adalah istilah untuk jarak yang terdapat antara hyperplane dengan data terdekat yang terdapat pada setiap kelas. Support Vector merupakan sebutan yang digunakan untuk subset training dataset yang paling dekat (Prabowo et al., 2018).
-
2.9. Uji Akurasi
Matriks konfusi atau matriks kesalahan yaitu tahapan perbandungan pada basis kategori, yaitu bentuk hubungan antara hasil dari klasifikasi otomatis dengan data yang didapatkan di lapangan (ground truth). Model matriks konfusi disajikan pada Tabel 2.
Tabel 2. Matriks Konfusi
|
Hasil Klasifikasi | ||||||
|
Data Lapangan |
A |
B |
C |
D |
Jumlah |
PA (%) |
|
A |
X11 |
X12 |
X13 |
X14 |
X1+ |
X11 /X1+ |
|
B |
X21 |
X21 |
X23 |
X24 |
X2+ |
X22 /X2+ |
|
C |
X31 |
X32 |
X33 |
X34 |
X3+ |
X33 /X3+ |
|
D |
X41 |
X42 |
X43 |
X44 |
X4+ |
X44 /X4+ |
|
Jumlah |
X+1 |
X+2 |
X+3 |
X+4 |
N | |
|
UA (%) |
X11 /X+1 |
X22/ X+2 |
X33 / X+3 |
X44 / X+4 | ||
Kategori akurasi didapatkan melalui confusion matrix terdiri dari user accuracy (UA), producer accuracy (PA), kappa accuracy, overall accuracy (OA), omission error (OE), dan commission error (CE). Berdasarkan SNI 7716:2011, dapat diketahui bahwa batas dari nilai akurasi mampu dimanfaatkan pada memetakan berbagai habitat yang hidup di dalam dasar perairan laut dangkal adalah ≥ 60% (LIPI, 2014). Menurut Vierra dan Garret (2005) terdapat kategori kesesuaian akurasi kappa seperti pada Tabel 3.
|
XU- Producer accuracy = — × 100% |
(5) |
|
τ, Xii i User accuracy = — × 100% |
(6) |
|
∑^ιXii Overall accuracy = ——— × 100% |
(7) |
|
Kappa accuracy N ∑i=ι X∏ — ∑i=ιXi+ + X+i = ---i ^r i+---- × 100% N2 -∑ri=1Xi+x+i |
(8) |
Omission error = 100% — PA (9)
Commision error = 100% — UA (10)
Dimana:
N : jumlah semua piksel yang digunakan untuk pengamatan
Xii : nilai diagonal matriks kontingensi baris ke-i dan kolom ke-i
X+i : jumlah piksel dalam kolom ke-i
Xi+ : jumlah piksel dalam baris ke-i
Tabel 3. Kategori Kesesuaian Akurasi Kappa
Nilai Kappa (%) Agreement
|
<0 |
Less than change agreement |
|
1-20 |
Slight agreement |
|
21-40 |
Fair agreement |
|
41-60 |
Moderate agreement |
|
61-80 |
Substansial agreement |
|
81-99 |
Almost perfect agreement |
Berdasarkan hasil pengamatan dilapangan didapatkan 405 titik untuk training sample area pada sepanjang area penelitian
dengan lima jenis komposisi habitat (Gambar 7). Sebanyak 286 titik digunakan untuk klasifikasi dan 119 digunakan untuk uji akurasi. Komposisi jenis habitat yang didapatkan adalah pasir batu (pb), pasir (p), biorock (bio), karang mati (km), dan karang mati rubble (kmr). Untuk kelas campuran, system penamaan kelas habitat bentik berdasarkan persentase yang mendominasi (Kurniawati et al., 2020).
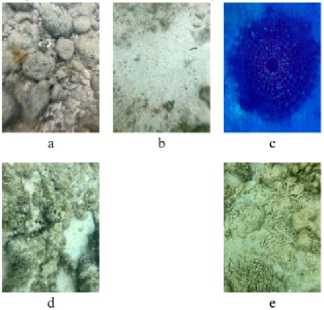
Keterangan a. Pasir Batu; b. Pasir; c. Biorock; d. Karang Mati; e. Karang Mati Rubble
Gambar 7. Komposisi Jenis Habitat
Komposisi penyusun habitat bentik berbeda pada setiap daerah yang dipengaruhi oleh beberapa faktor. Penelitian pemetaan habitat bentik menggunakan citra Sentinel-2A dilakukan Karang et al. (2019) di perairan dangkal pesisir Tanjung Benoa mendapatkan tiga kelas habitat dan Mukrimin et al. (2021) di perairan dangkal Pulau Tiga mendapatkan enam kelas habitat. Sedangkan pemetaan habitat bentik menggunakan UAV oleh Wahidin dan Rommy (2018) di kawasan reklamasi pantai Kota Ternate mendapatkan lima kelas habitat.
-
3.2. Data Penginderaan Jauh
Akuisisi foto udara pada seluruh area penelitian menghasilkan total 931 foto. Pada penerbangan pertama menghasilkan 323 foto, pada penerbangan kedua sebanyak 343 foto, dan pada penerbangan ketiga sebanyak 247 foto. Contoh foto menggunakan jalur terbang dapat dilihat pada Gambar 8. Banyaknya foto udara yang dihasilkan dipengaruhi oleh ketinggian terbang, overlap, dan luasan area penelitian. Pada penelitian ini dilakukan tiga kali penerbangan dengan masing-masing waktu terbang adalah 16 menit, 17 menit, dan 13 menit diketinggian 100 meter sehingga resolusi spasial yang didapatkan adalah 2.53 cm2/piksel.

-
3.3. Pengolahan Citra Sentinel-2A
Pada penelitian ini didapatkan pola spektral dari ketiga pasangan kanal citra sentinel-2A dan nilai statistik dari karakteristik spektral pada setiap kelas habitat bentik yang ditemukan pada citra sentinel-2A dan citra UAV yang terlihat pada Gambar 11 dan Tabel 4. Apabila penyebaran datanya sangat besar pada nilai standar deviasi, terhadap nilai rata-rata maka semakin besar pula nilai standar deviasinya. Sebaliknya jika penyebaran datanya kecil atau bisa disebut homogen terhadap nilai rata-rata maka nilai standar deviasinya pun akan kecil (Yusniyanti dan Kurniati, 2017).
Gambar 8. Contoh hasil foto Drone Type DJI Mavic Mavic 2 Pro
Foto yang didapat dari ketiga penerbangan, kemudian digabungkan yang menghasilkan ortofoto dapat dilihat pada Gambar 9. Wahidin dan Rommy (2018) melakukan pemetaan substrat dasar perairan di kawasan reklamasi pantai Kota Ternate dengan menggunakan drone type DJI Phantom 4 Advanced, ketinggian 113 meter, waktu terbang 12 menit menghasilkan 171 foto dengan resolusi spasial 2.74 cm2/piksel. Selain itu Mastu (2018) melakukan pemetaan habitat bentik di pulau wangi-wangi menggunakan drone type DJI Phantom 3 Professional pada ketinggian 120 meter pada tiga kali penerbangan dengan waktu terbang rata-rata tiap jalurnya antara 13-14 menit dan overlap 70% menghasilkan 1274 foto dengan resolusi spasial citra UAV yaitu 5.2 cm2/piksel.

Gambar 9. Orthomosaic Citra UAV

Gambar 10. Area Penelitian pada Citra Sentinel-2A
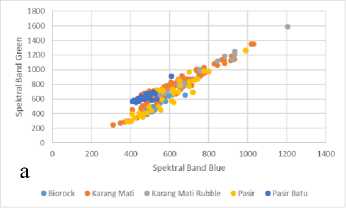
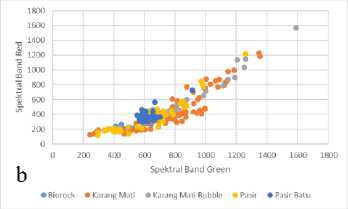
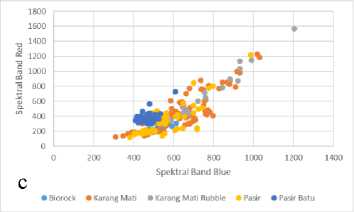
Keterangan: a. Pasangan Kanal Blue-Green; b. Pasangan Kanal Green-Red; c. Pasangan Kanal Blue-Red
Gambar 11. Pola Spektral Ruang Spektral Pasangan Kanal
Citra Sentinel-2A
Tabel 4. Nilai Statistik Spektral pada Citra Sentinel-2A dan Citra UAV
|
Kelas |
Kanal |
Min. |
Max. |
Rata-Rata |
Standar Deviasi |
|
Biorock |
Red-UAV |
74 |
126 |
104.2 |
12.2 |
|
Green- UAV |
122 |
155 |
134.7 |
7.9 | |
|
Blue-UAV |
128 |
155 |
143.13 |
5.71 | |
|
Blue Sentinel |
447 |
679 |
523.72 |
43.93 | |
|
Green Sentinel |
370 |
659 |
496.06 |
77.7 | |
|
Red-Sentinel |
167 |
4465 |
236.4 |
53 | |
|
Karang Mati |
Red-UAV |
74 |
189 |
137.76 |
22.57 |
|
Green- UAV |
106 |
203 |
151.12 |
19.05 | |
|
Blue-UAV |
110 |
185 |
144.86 |
14.79 |
|
BlueSentinel GreenSentinel Red-Sentinel |
310 243 126 |
1048 1358 1230 |
587.84 741.47 412.56 |
136.94 185.76 200.6 | |
|
Karang Mati Rubble |
Red- UAV |
96 |
168 |
134.29 |
16.42 |
|
Green- UAV |
109 |
179 |
149.19 |
13.59 | |
|
Blue-UAV |
113 |
173 |
144.74 |
11.8 | |
|
Blue Sentinel |
553 |
1204 |
757.03 |
151.69 | |
|
Green Sentinel |
655 |
1588 |
949.7 |
230.29 | |
|
Red- Sentinel |
329 |
1570 |
669.45 |
306.42 | |
|
Pasir |
Red- UAV |
56 |
193 |
113.32 |
28.54 |
|
Green- UAV |
111 |
210 |
154.67 |
18.44 | |
|
Blue-UAV |
121 |
191 |
154.08 |
13.6 | |
|
Blue Sentinel |
382 |
987 |
581.19 |
120.98 | |
|
Green Sentinel |
295 |
1260 |
639.52 |
206.65 | |
|
Red- Sentinel |
120 |
1216 |
352.24 |
216.44 | |
|
Pasir Batu |
Red- UAV |
81 |
166 |
143.61 |
13.9 |
|
Green- UAV |
80 |
176 |
145.43 |
15.77 | |
|
Blue-UAV |
85 |
170 |
142.75 |
12.98 | |
|
Blue Sentinel |
409 |
743 |
478.07 |
49.99 | |
|
Green Sentinel |
552 |
1036 |
634.43 |
79.65 | |
|
Red- Sentinel |
301 |
885 |
386.58 |
101.88 |
-
3.4. Klasifikasi Citra
Pada penelitian ini adalah mendapatkan kelas perairan seluas 23.67 ha kemudian selanjutnya kelas perairan dapat digunakan untuk klasifikasi jenis. Klasifikasi Jenis digunakan untuk mendapatkan kelas habitat bentik, pada penelitian ini didapatkan lima kelas habitat dengan hasil luasan dan hasil klasifikasi disajikan pada Tabel 5 dan Gambar 12.
|
Tabel 5. Luasan (ha). | ||
|
Klasifikasi |
Citra Sentinel-2A |
Citra UAV |
|
Pasir Batu |
1.67 |
1.76 |
|
Pasir |
6.05 |
7.32 |
|
Biorock |
0.87 |
0.18 |
|
Karang Mati |
13.63 |
12.86 |
|
Karang Mati Rubble |
1.45 |
1.54 |
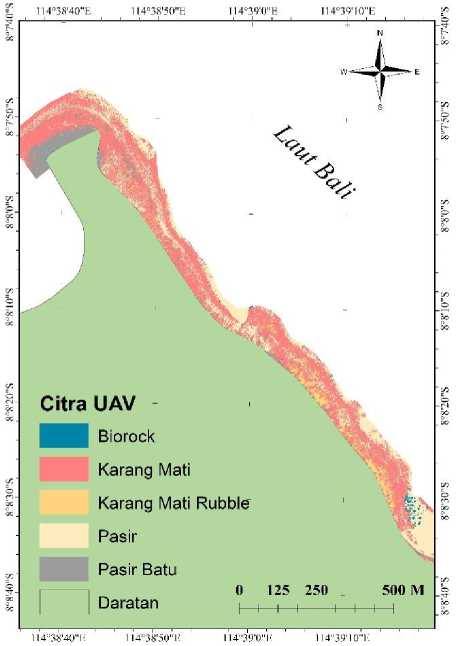
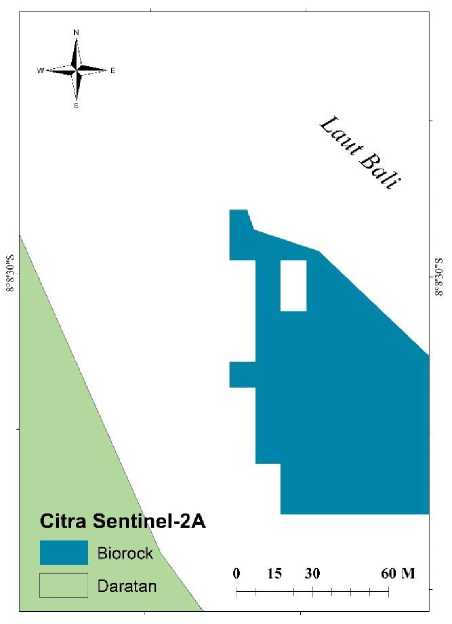
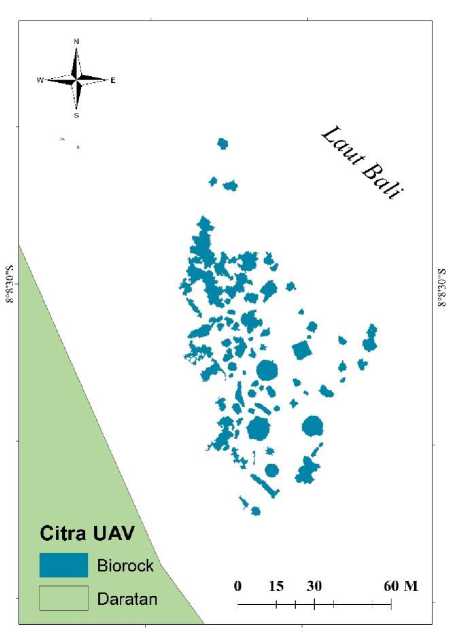
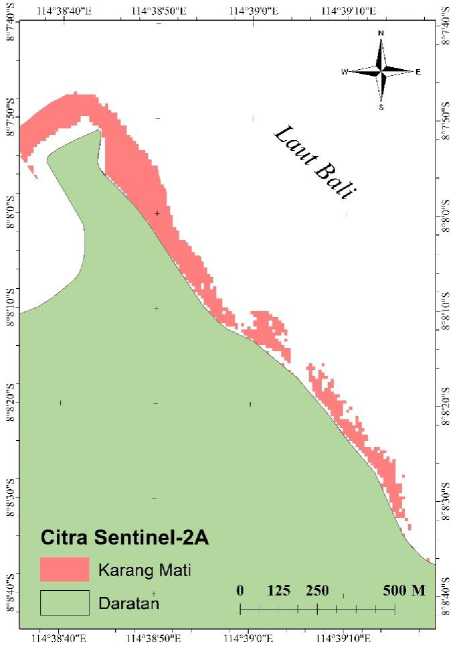
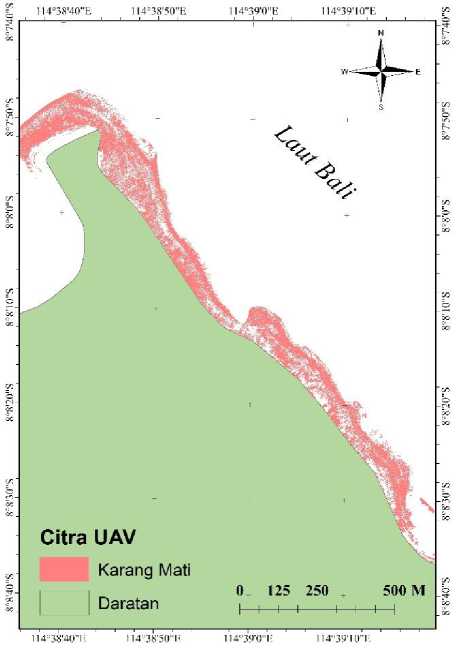
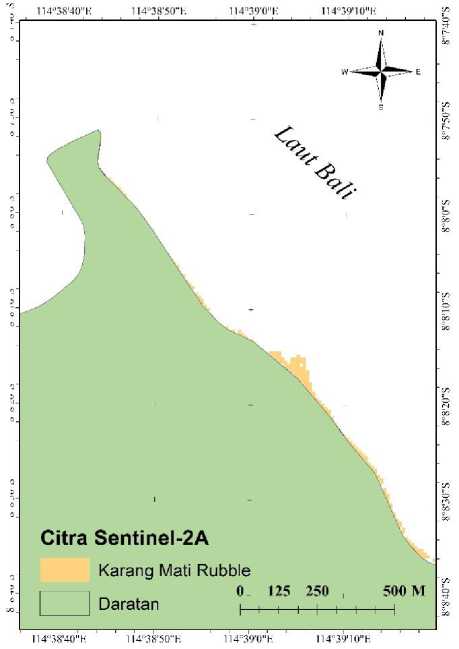
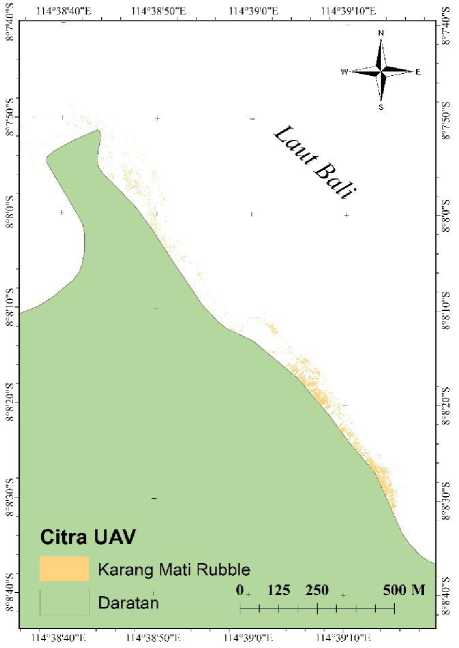
Pada penelitian ini, sebaran biorock, karang mati, dan karang mati rubble yang didapatkan menggunakan citra Sentinel-2A dan citra UAV disajikan pada Gambar 13, Gambar 14, dan Gambar 15. Luasan yang dihasilkan oleh kedua citra tersebut memiliki perbedaan yang diduga disebabkan oleh perbedaan resolusi spasial citra, kualitas citra, luas area penelitian, kesalahan
dilapangan seperti kesalahan pengambilan sampel serta akurasi GPS saat pengambilan data lapangan, terjadinya tumpang tindih antara kelas yang telah terklasifikasi atau kesalahan saat proses segmentasi. Menurut Prabowo et al., (2018) kesalahan pada proses klasifikasi dapat memberikan pengaruh pada hasil luasan yang didapatkan.
Ukuran struktur biorock yang terdapat di perairan dangkal Pemuteran, Bali diperkirakan sekitar 1-5 meter, pada struktur tersebut terdapat fragmen terumbu karang yang umumnya berukuran kecil sekitar 5-10 cm (Sadili et al., 2015). Karena fragmen terumbu karang tersebut relatif kecil dan menempel dengan struktur biorock, pengambilan data lapangan fragmen karang hidup menggunakan GPS dengan akurasi yang tidak sepadan dengan resolusi citra sehingga cukup sulit untuk dideteksi. Selain itu, diduga jika objek pada citra terlalu kecil dapat terjadinya over segmentation. Menurut Maksum et al. (2016) pada klasifikasi berbasis objek, jika proses segmentasi yang dilakukan mengalami over segmentation (segmentasi yang dihasilkan melebihi objek) maka dapat terjadinya kesalahan pada klasifikasi yang disebabkan karena terlalu banyaknya objek yang ada. Karena pada proses klasifikasi berbasis objek juga mempertimbangkan warna yang berkaitan dengan informasi spektral, hal ini diduga juga menyebabkan terjadinya kesalahan pada klasifikasi. Menurut Karang et al. (2019) beberapa faktor penyebab dari terjadinya kesalahan pada klasifikasi sehingga membuat berkurangnya tingkat akurasi adalah pengambilan data saat di lapangan dan perekaman citra yang dapat mengubah informasi spektral, ditemukan kesalahan pada penentuan training sample area pada tiap kelas, dan terdapatnya kesalahan pada proses identifikasi terhadap objek habitat yang hidup di perairan dangkal.
-
3.5. Uji Akurasi
Uji akurasi dengan matriks konfusi untuk citra Sentinel-2A dan citra UAV didapatkan hasil Overall Accuracy (OA) adalah sebesar 73.95% dan 81.51% dapat dilihat pada Tabel 6 dan 7. Producer accuracy (PA) citra Sentinel-2A tertera bahwa karang mati mempunyai akurasi tertinggi sekitar 83.05% dan terendah pada kelas pasir dengan akurasi sebesar 58.82% sedangkan pada citra UAV menunjukkan biorock memiliki akurasi tertinggi yaitu 92.85% dan terendah pada kelas karang mati rubble sebesar 70%. User accuracy (UA) citra Sentinel-2A dapat dilihat bahwa kelas pasir batu berada pada tingkat tertinggi yang mempunyai sekitar 85.71% dan terendah pada kelas karang mati rubble yang mempunyai angka akurasi sekitar 50% sedangkan pada citra UAV menunjukkan kelas biorock memiliki akurasi tertinggi yaitu 100% dan terendah pada kelas karang mati rubble sebesar 63.63%.
Over estime sering terjadi pada saat pengecekan akurasi secara keseluruhan (overall accuracy) terutama disebabkan oleh proses dalam pengukuran menggunakan piksel yang terdapat pada posisi diagonal dalam matriks, sehingga disarankan untuk menggunakan akurasi bentuk kanpa, karena semua elemen direkomendasikan dalam perhitungan akurasi pada matrik yang digunakan dalam proses perhitungan. Pada citra Sentinel-2A didapatkan akurasi kappa sebesar 61.57% sedangkan pada citra UAV didapatkan akurasi kappa sebesar 73.22%.
Penelitian Mastu (2018) menggunakan klasifikasi berbasis objek dengan algoritma SVM mendapatkan overall accuracy menggunakan citra Sentinel-2A sebesar 64.1% dan menggunakan citra UAV sebesar 81.1%. Selain itu Mukrimin et al. (2021) melakukan pemetaan habitat bentik dengan memakai citra Sentinel-2A yaitu metode klasifikasi berbasis objek dengan algoritma SVM yang didapatkan overall
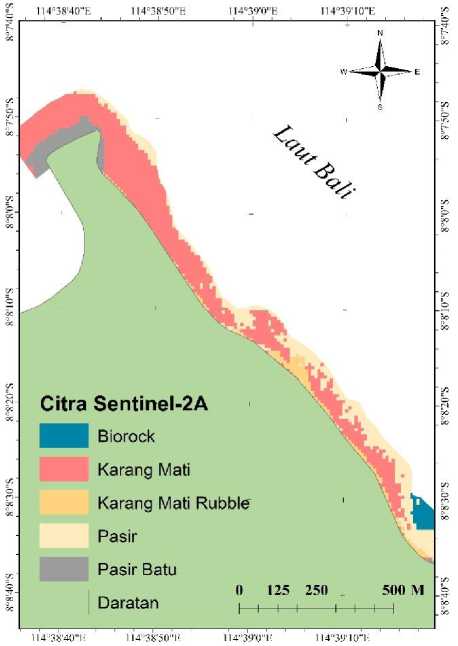
A
b
Keterangan a. Citra Sentinel-2A; b. Citra UAV
Gambar 12. Peta Klasifikasi Jenis Citra Sentinel-2A dan Citra UAV
a b
Keterangan a. Citra Sentinel-2A; b. Citra UAV
Gambar 13. Peta Sebaran Biorock Citra Sentinel-2A dan Citra UAV
a
b
Keterangan a. Citra Sentinel-2A; b. Citra UAV
Gambar 14. Peta Sebaran Karang Mati Citra Sentinel-2A dan Citra UAV
8T40"S 8n8'30"S 8n8,2O"S 8n8,10"S 8,WS 8n7,50"S 8n7,40llS
a
b
Keterangan a. Citra Sentinel-2A; b. Citra UAV
Gambar 15. Peta Sebarang Karang Mati Rubble Citra Sentinel-2A dan Citra UAV
accuracy sekitar 88% dan Dimara et al. (2020) mendapatkan overall accuracy sebesar 73.77%.
Tabel 6. Uji Akurasi Citra Sentinel-2A
|
Hasil Klasifikasi | ||||||||
|
Data Lapangan |
P |
PB |
KM |
KMR |
BIO |
Jumlah |
PA (%) |
CE (%) |
|
P |
10 |
0 |
4 |
1 |
2 |
17 |
58.82 |
52.95 |
|
PB |
0 |
12 |
7 |
0 |
0 |
19 |
63.15 |
36.85 |
|
KM |
1 |
2 |
49 |
6 |
1 |
59 |
83.05 |
19.36 |
|
KMR |
0 |
0 |
3 |
7 |
0 |
10 |
70 |
30 |
|
BIO |
4 |
0 |
0 |
0 |
10 |
14 |
71.42 |
28.58 |
|
Jumlah |
15 |
14 |
63 |
14 |
13 |
119 | ||
|
UA (%) |
66.67 |
85.71 |
77.78 |
50 |
76.92 | |||
|
OE (%) |
42.86 |
20 |
21.88 |
53.34 |
28.58 |
OA |
73.95% | |
Tabel 7. Uji Akurasi Citra UAV
|
Hasil Klasifikasi | ||||||||
|
Data Lapangan |
P |
PB |
KM |
KMR |
BIO |
Jumlah |
PA (%) |
CE (%) |
|
P |
12 |
1 |
3 |
1 |
0 |
17 |
70.58 |
29.41 |
|
PB |
0 |
16 |
3 |
0 |
0 |
19 |
84.21 |
15.79 |
|
KM |
4 |
3 |
49 |
3 |
0 |
59 |
83.05 |
16.95 |
|
KMR |
0 |
1 |
2 |
7 |
0 |
10 |
70 |
30 |
|
BIO |
0 |
0 |
1 |
0 |
13 |
14 |
92.85 |
7.15 |
|
Jumlah |
16 |
21 |
58 |
11 |
13 |
119 | ||
|
UA (%) |
75 |
76.19 |
84.48 |
63.63 |
100 | |||
|
OE (%) |
25 |
23.81 |
15.52 |
36.67 |
0 |
OA |
81.51% | |
Pemetaan habitat bentik dengan memakai bentuk dari citra Sentinel-2B yaitu oleh klasifikasi berbasis objek memakai algoritma SVM oleh Kurniawati et al. (2020) mendapatkan overall accuracy sebesar 52.13% dan 49.20%. Penelitian pemetaan substrat dasar perairan menggunakan drone telah dilakukan juga oleh Wahidin dan Rommy (2018) yang menghasilkan overall accuracy sebesar 82.2%.
Citra Sentinel-2A dapat digunakan dalam pemetaan habitat bentik di Perairan Pemuteran dengan tingkat akurasi yang tinggi dengan overall accuracy sebesar 73.95% dan substantial agreement untuk akurasi kappa sebesar 61.57%. Sedangkan pemanfaatan UAV dapat meningkatkan akurasi dengan peningkatan overall accuracy sebesar 7.5% (81.51%) dan peningkatan akurasi kappa sebesar 11.6% (73.22%) dibandingkan dengan citra Sentinel-2A.
Citra Sentinel-2A dan citra UAV mampu mengidentifikasi kondisi sebaran habitat bentik di Perairan Pemuteran, Bali dengan lima jenis habitat bentik yaitu karang mati, karang mati rubble, biorock, pasir, dan pasir batu. Terdapat perbedaan luasan masing-masing jenis habitat bentik dari hasil klasifikasi menggunakan citra Sentinel-2A dan citra UAV yang disebabkan oleh perbedaan resolusi spasial dan proses klasifikasi.
Kelebihan penelitian ini dapat melihat perbandingan akurasi citra Sentinel-2A dan UAV menggunakan klasifikasi berbasis objek dan algoritma SVM, yang menunjukkan perbedaan signifikan meskipun nilai akurasi citra Sentinel-2A lebih rendah dari UAV. Adapun kelemahan dari penelitian ini yaitu kurang meratanya pengambilan data lapangan, sehingga perlu lebih diperhatikan kemerataannya sesuai dengan luasan area penelitian. Pada penelitian ini juga belum bisa dilakukan koreksi efek sunglint pada citra UAV karena keterbatasan pada pengambilan data foto udara, tetapi untuk penelitian selanjutnya diharapkan dapat dilakukan koreksi efek sunglint karena sudah ada penelitian terbaru terkait dengan koreksi efek sunglint. Selain itu perlu dilakukannya penelitian lanjutan mengenai drone untuk penyempurnaan deteksi habitat bentik di perairan dangkal menggunakan spesifikasi dan proses akuisisi drone yang lebih
baik sehingga tingkat akurasi yang didapatkan akan lebih tinggi dan penggunaan metode serta algoritma yang berbeda diharapkan dapat dilakukan agar dapat diketahui perbandingannya.
[BIG] Badan Informasi Geospasial. 2014. Peraturan Kepala Badan Informasi Geospasial No. 3 Tentang Pedoman Teknis Pengumpulan dan Pengolahan Data Geospasial Objek Perairan Bawah Laut Perairan Laut Dangkal. Cibinong: BIG.
[BIG] Badan Informasi Geospasial. 2017. Peraturan Kepala Badan Informasi Geospasial No. 7 Tentang Kompetensi Kerja di Bidang Informasi Geospasial. Cibinong: BIG.
[BPN] Badan Pertanahan Nasional. 2017. Petunjuk Tekniks Pembuatan Peta Kerja dengan Menggunakan Pesawat Nirawak/ Drone. Jakarta: Direktorat Jenderal Infrastruktur Keagrariaan Kementerian Agraria dan Tata Ruang.
[LIPI] Lembaga Ilmu Pengetahuan Indonesia. 2014. Panduan Teknis Pemetaan Habitat Dasar Perairan Laut Dangkal. Jakarta: LIPI
[Pusfatja LAPAN] Pusat Pemanfaatan Penginderaan Jarak Jauh LAPAN. 2015. Pedoman Pengolahan Data Penginderaan Jauh Untuk Ekosistem Terumbu Karang. Jakarta: LAPAN.
Akdon dan Hadi. 2004. Aplikasi Statistika dan Metode Penelitian untuk Administrasi dan Manajemen.Bandung: Dewa Ruchi.
Ampou, Eghbert Elvan, Ofri Johan, Christophe E. Menkes, Fernando Niño, Florence Birol, Sylvain Ouillon, dan Serge Andréfouët. 2017. Coral mortality induced by the 2015–2016 El-Niño in Indonesia: the effect of rapid sea level fall. Biogeosciences, 14, 817–826.
Anggoro A. Siregar V.P., Agus S.B. 2017. Multiscale classification for geomorphic zone and benthic habitats mapping using OBIA method in Pari Island. Jurnal Penginderaan Jauh. 14(2):89-93.
Fajar, Jay. 2018. Indahnya Biorock Barong dan Rangda, Penghias Bawah Laut Pemuteran. https://www.mongabay.co.id/2018/12/19/indahnya-biorock-barong-dan-rangda-penghias-bawah-laut-pemuteran/ [2
September 2020].
Goreau, Tom. 2020. Biorock Saves Bleaching Corals Again. http://www.biorock-indonesia.com/biorock-saves-bleaching-corals-again/. [27 Oktober 2020].
Hadi, Tri Aryono et al. 2018. Status Terumbu Karang Indonesia 2018. Jakarta: Puslit Oseanografi-LIPI.
Hadi, Tri Aryono et al. 2019. Status Terumbu Karang Indonesia 2019. Jakarta: Puslit Oseanografi-LIPI.
Jaya, I.N.S., 2010. Analisis Citra Digital, Perspektif Penginderaan Jauh untuk Pengelolaan Sumber Daya Alam. Fakultas Kehutanan. Bogor (ID): Institut Pertanian Bogor.
Karang, I Wayan Gede Astawa, I Dewa Made Krisna Putra Astaman, I Wayan Matsya Deva Nagendra,I Gede Hendrawan. 2019. Pemetaan Habitat Perairan Dangkal Di Kawasan Padat Wisata Tanjung Benoa Bali Menggunakan Data Remote Sensing. Jurnal Jurnal Ilmu
Lingkungan Volume 13 No.2 : 227-237.
Kurniawati, Esty, Vincentius Siregar, dan I Wayan Nurjaya. 2020. Klasifikasi Habitat Perairan Dangkal Berbasis Objek Menggunakan Citra Worldview 2 Dan Sentinel 2B Di Perairan Kepulauan Seribu. J. Ilmu dan Teknologi Kelautan Tropis, 12(2): 421-435.
Maksum, Zia UI, Yudo Prasetyo, dan Haniah. 2016. Perbandingan Klasifikasi Tutupan Lahan menggunakan Metode Klasifisi Berbasis Objek dan Klasifikasi Berbasis Piksel, pada Citra Resolusi Tinggi dan Menengah. Jurnal Geodesi UNDIP.
Mastu, La Ode Khairum. 2018. Pemetaan Habitat Bentik Berbasis Objek Menggunakan Citra Unmanned Aerial Vehicle (UAV) dan Satelit Sentinel-2 Di Perairan Pulau Wangi-Wangi Kabupaten Wakatobi. [Thesis]. Bogor: Institut Pertanian Bogor.
McWilliams, John P., Isabelle M. Cote, Jennifer A. Gill, William J. Sutherland, Andrew R. Watkinson. 2005. Accelerating Impact of Temperature-Induced Coral Bleaching in the Caribbean [abstract]. Ecology 86(8), 2055-2060.
Meiarti, R., T. Seto, dan J. Sartohadi. 2019. Uji Akurasi Hasil Teknologi Pesawat Udara Tanpa Awak (Unmanned Aerial Vehicle) dalam Aplikasi Pemetaan Kebencanaan Kepesisiran. Jurnal Geografi, Edukasi dan Lingkungan 3(1),1-17.
Mukrimin, La Ode Muhammad Yasir Haya, Amadhan Takwir. 2021. Pemetaan Habitat Bentik Perairan Dangkal Di Pesisir Pulau Tiga (Selat Tiworo) Menggunakan Citra Satelit Sentinel-2A. Sapa Laut Vol.6(1): 63-74.
Mustafa. 2017. Terumbu Karang Pemuteran Rusak Parah, Konon ini Penyebabnya.
https://radarbali.jawapos.com/read/2017/08/01/4782/terumbu-karang-pemuteran-rusak-parah-konon-ini-penyebabnya [2 September 2020].
Nugroho AS, Witarto AB, Handoko D. 2003. Support Vector Machine Teori Dan Aplikasinya Dalam Bioinformatika. Ilmu Komputer.
Parsa, M. I. 2013. Optimalisasi Parameter Segmentasi untuk Pemetaan Lahan Sawah menggunakan Citra Satelit Landsat (Studi Kasus Padang Pariaman, Sumatera Barat, dan Tanggamus, Lampung. Jurnal Penginderaan Jauh.
Prabowo, Nico Wantona, Vincentius P. Siregar, dan Syamsul Bahri Agus. 2018. Klasifikasi Habitat Bentik Berbasis Objek Dengan Algoritma Support Vector Machines Dan Decision Tree Menggunakan Citra Multispektral Spot-7 Di Pulau Harapan Dan Pulau Kelapa. Jurnal Ilmu dan Teknologi Kelautan Tropis Vol. 10 No. 1, Hlm. 123-134, April 2018. Bogor: FPIK IPB.
Purwanto, Anang Dwi, Kuncoro Teguh Setiawan dan Devica Natalia Br. Ginting. 2019. Pemanfaatan Data Penginderaan Jauh untuk Ekstraksi Habitat Perairan Laut Dangkal di Pantai Pemuteran, Bali, Indonesia. Jurnal Jurnal Kelautan Tropis Vol. 22(2):165-172. Jakarta : Pusfatja Lapan.
Ramadhani YH, Rohmatulloh, Pominam KA, Susanti R. 2015. Pemetaan Pulau Kecil Dengan Pendekatan Berbasis Objek Menggunakan Data Unmanned Aerial Vehicle (UAV). Majalah Ilmiah Globe. 17(2):125-134.
Rango, Albert, Andrea Lali berte, Caiti Steele, Jeffrey E. Herrick, Brandon Bestelmeyer, Thomas Schmugge, Abigail Roanhorse, Vince Jenkins. 2006. Using Unmanned Aerial vehicles for Rangelands: Current
Applications and Future Potentials. Research Article Environmental Practice 8 (3) .
Sadili, Didi, DKK. 2015. Pedoman Rehabilitasi Terumbu Karang. Jakarta: Direktorat Konservasi dan Keanekaragaman Hayati Laut.
Setiawan, K. T., Osawa, T., dan Nuarsa, I. W. 2014. Aplikasi Algoritma Van Hangel dan Spitzer untuk Ekstraksi Informasi Batimetri Menggunakan Data Landsat. Jurnal Penginderaan Jauh Pusat Pemanfaat. Penginderaan Jauh LAPAN, 294-300.
Setiawan, Wawan. 2012. Pengolahan Citra Penginderaan Jauh Klasifikasi, Fusi Data, dan Deteksi Perubahan Wilayah. Bandung: UPI Press.
Siregar, V. 2010. Pemetaan Substrat Dasar Perairan Dangkal Karang Congkak Dan Lebar Kepulauan Seribu Menggunakan Citra Satelit Quickbird. E-Jurnal Itkt, 2, pp.19-30.
Sugara, Ayub, Vincentius P. Siregar, dan Syamsul B. Agus. 2018. Klasifikasi Habitat Bentik Perairan Dangkal Dari Citra Worldview-2 Menggunakan Data In-Situ dan Drone. Jurnal Ilmu dan Teknologi Kelautan Tropis Vol. 12 No. 1, Hlm. 135-150, April 2020.
Trimble. 2014. Ecognition developer: user guide. Munchen, Germany: Trimble Germany GmbH.
Twinandia, Destya, A. Shofy Mubarak dan Akhmad Taufiq Mukti. 2011. Pengaruh Luas Penutupan Terumbu Karang Pada Lokasi Biorock dan Reef Seen Terhadap Keragaman Spesies Ikan di Wilayah Perairan Pemuteran, Bali. Jurnal Ilmiah Perikanan dan Kelautan Vol. 3 No. 2.
Wahidin, Nurhalis, dan Rommy M. Abdullah. 2018. Pemetaan Substrat Dasar Perairan Dangkal Menggunakan Drone Komersial dan Teknik Fotogrametri. Prosiding Seminar Nasional Inovasi Iptek Perikanan dan Kelautan I.
Vierra, Anthony J., dan Joanne M. Garret. 2005. Understanding Interobserver Agreement : The Kappa Statistic. Journal of Family Medicine 37 (5):360:3.
Yusniyanti, Erna dan Kurniati. 2017. Analisa Puncak Banjir Dengan Metode MAF (Studi Kasus Sungai Krueng Keureuto). Jurnal Einstein 2407-747x
Zhu G, Blumberg DG. 2002. Classification using ASTER data and SVM algorithms: The case study of Beer Sheva, Israel. Remote Sens Environ. 80(2): 233-240.
39
Discussion and feedback