Segmentasi Baris Lontar Dengan Metode A * Path Planning
on
p-ISSN: 2301-5373
e-ISSN: 2654-5101
Jurnal Elektronik Ilmu Komputer Udayana
Volume 11, No 2. November 2022
Segmentasi Baris Lontar Dengan Metode A * Path Planning
Anak Agung Istri Dewi Lestaria1, I Gede Santi Astawaa2, Ngurah Agus Sanjaya ERa3, I Putu Gede Hendra Suputraa4, Cokorda Rai Adi Pramarthaa5, I Wayan Suprianaa6
aProgram Studi Informatika, Fakultas Matematika dan Ilmu Pengetahuan Alam, Universitas Udayana
Badung, Bali, Indonesia
3agus sanjaya@unud.ac.id
Abstract
Historical documents in the form of ancient manuscripts are one form of the Indonesian nation's cultural heritage that deserves to be important, one of which is Lontar. Currently not many people can read the writings in palm leaves, therefore, ancient manuscript collectors have made efforts to digitize ancient manuscripts. The digitization of ancient manuscripts aims to improve the image quality of ancient manuscripts with the help of computers. Digitization requires an image quality improvement process by performing noise reduction and edge detection and line segmentation on digital images of ancient manuscripts. In this study, the noise reduction process uses the Mean Filter method, edge detection uses the Sobel operator, and line segmentation in this study uses the A * Path Planning Algorithm. Based on research conducted on 24 lontar images, line segmentation process obtained an accuracy of 95%.
Keywords: Image Processing, Lontar, Line Segmentation, A * Path Planning, Noise Reduction
Dokumen bersejarah berupa naskah kuno merupakan salah satu bentuk warisan budaya Bangsa Indonesia yang bernilai cukup penting, salah satunya yaitu Lontar. Seiring berjalannya waktu, penggunaan daun lontar semakin jarang karena telah tergantikan dengan penggunaan kertas. Daun lontar yang disimpan memiliki usia yang sudah tidak muda lagi sehingga lontar-lontar tua mulai mengalami kerusakan dan semakin sulit untuk dibaca secara manual karena lapisan epidermisnya yang terdiri dari sel-sel serat yang berupa kultikula (lapisan kuku) yang melindunginya sudah semakin terkikis dan akan menyebabkan naskah lontar lama-lama menjadi menipis. Sisa-sisa lepuhan dari lapisan epidermisnya akan kelihatan seperti debu halus yang melekat pada naskah lontar sehingga sulit untuk dibaca [1].
Saat ini tidak banyak orang yang dapat membaca tulisan dalam daun lontar, oleh karena itu, para kolektor naskah kuno telah melakukan upaya digitalisasi naskah kuno. Digitalisasi terhadap naskah kuno bertujuan untuk memperbaiki kualitas citra pada naskah kuno dengan bantuan komputer. Ketika naskah kuno telah diubah menjadi citra digital terdapat noise-noise pengganggu informasi, sehingga diperlukan perbaikan kualitas citra dengan melakukan reduksi noise pada citra digital naskah kuno. Pada saat proses reduksi noise tulisan-tulisan pada naskah kuno mengalami penipisan, sehingga setelah melakukan reduksi diperlukan proses penegasan karakter tulisan pada naskah kuno dengan deteksi tepi.
Setelah proses-proses tersebut terdapat beberapa pemrosesan citra lain, salah satunya adalah segmentasi. Segmentasi terdiri dari 2 tahap yaitu segmentasi baris dan juga segmentasi karakter. Segmentasi baris merupakan proses memisahkan baris satu dengan baris lainnya. Sedangkan segmentasi karakter merupakan proses memisahkan setiap karakter pada citra naskah kuno. Kedua proses segmentasi tersebut memiliki masalah-masalahnya tersendiri, misalnya, garis teks miring dan ketidakteraturan dalam garis seperti lebar baris, tinggi, dan jarak antar baris. Melihat karakteristik aksara Bali yang mengandung pengangge aksara berupa ulu dan gantungan, sering kali untuk 349
melakukan segmentasi baris pada tulisan di naskah kuno tersebut membetikan tantangan yang cocok untuk segmentasi baris.
Salah satu metode yang digunakan untuk proses segmentasi baris adalah metode A * Path Planning, adalah algoritma path finding untuk menghitung jalur terpendek dari titik awal ke tujuannya dengan menghindari rintangan sepanjang jalan. Penelitian mengenai penerapan metode A * Path Planning sudah pernah dilakukan sebelumnya, salah satunya adalah penelitian yang dilakukan oleh Pradnyawati [2], pada penelitian ini dilakukan segmentasi karakter aksara Bali pada citra lontar, sebelum itu dilakukan segmentasi baris terlebih dahulu dengan akurasi sebesar 93%.
Pada penelitian yang dilakukan penulis ini, segmentasi baris dilakukan menggunakan metode A * Path Planning pada citra lontar Bali.
Penelitian ini terbagi menjadi beberapa tahapan, diantaranya studi literatur, pengumpulan data, preprocessing, noise reduction, edge detection, segmentasi baris, dan testing. Pada tahap studi literatur, penulis melakukan pencarian, pengumpulan, serta pemahaman mengenai informasi dan literatur yang mendukung dalam penelitian ini. Data yang digunakan dalam penelitian ini adalah data sekunder yang diperoleh dari arsip The Balinese Digital Library. Tahapan selanjutnya adalah preprocessing, dimana pada tahapan ini terdapat proses grayscalling dan binarization untuk menghasilkan citra biner atau citra hitam putih. Kemudian dilanjutkan dengan denoising atau reduksi noise dengan metode mean filter dan deteksi tepi menggunakan operator sobel pada citra biner. Terakhir adalah tahapan segmentasi baris dengan A * Path Planning.
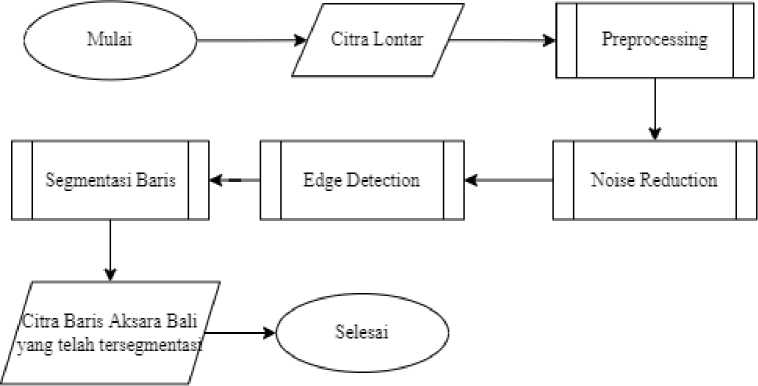
Gambar 1. Flowchart Metode Penelitian
Gambar 1 merupakan desain penelitian segmentasi baris pada citra lontar Bali. Citra lontar sebagai input akan masuk pada proses preprocessing, dilanjutkan dengan denoising atau reduksi noise dengan metode mean filter, kemudian deteksi tepi menggunakan operator sobel pada citra biner, dilanjutkan dengan segmentasi baris menggunakan A * Path Planning sehingga menghasilkan citra baris aksara Bali yang telah tersegmentasi.
Pada tahap studi literatur, penulis melakukan pengumpulan dan pencarian, serta pemahaman mengenai informasi, literatur dan teori-teori yang mendukung terkait dengan penelitian mencakup tahapan dalam pengolahan citra digital dan algoritma yang digunakan untuk segmentasi baris yaitu metode A * Path Planning.
-
2.2. Pengumpulan Data
Jenis data yang digunakan dalam penelitian ini adalah data sekunder. Data yang dipilih merupakan citra lontar Bali yang hanya mengandung objek aksara Bali dengan kondisi sedikit noise dan aksara yang tertulis pada lontar dapat dilihat dengan mata telanjang. Jumlah data lontar yang digunakan pada penelitian kali ini yaitu 24 citra lontar yang diperoleh dari arsip The Balinese Digital Library pada website https://archive.org//. Gambar 2 merupakan contoh data lontar yang akan digunakan yang mana gambar akan melalui proses cropping terlebih dahulu.
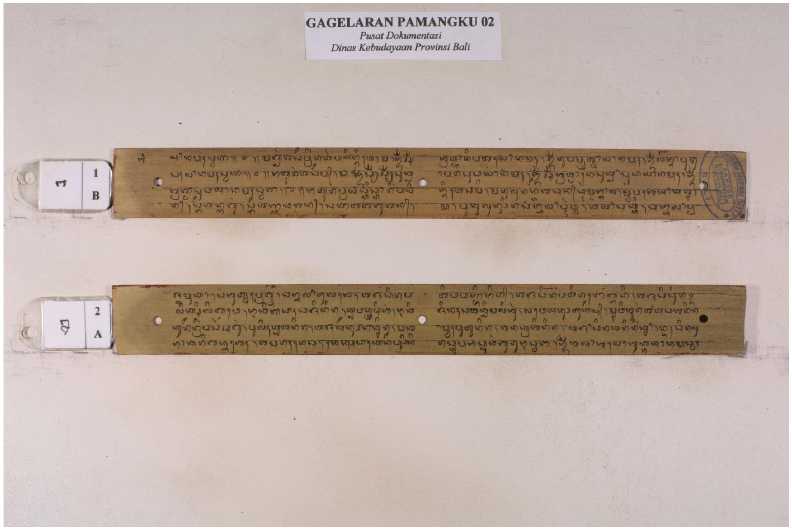
Gambar 2. Contoh Data Lontar
-
2.3. Grayscalling
Citra digital dengan nilai dari Red = Green = Blue merupakan citra grayscale yang hanya memiliki satu nilai kanal pada setiap pikselnya [3]. Pada citra grayscale ditampilkan citra yang terdiri atas warna hitam, keabuan, dan putih. Tingkat keabuan di sini merupakan warna abu dengan berbagai tingkatan dari hitam hingga mendekati putih.
Untuk mengubah citra berwarna yang memiliki nilai matrik masing-masing Red, Green, dan Blue menjadi citra grayscale, dapat dilakukan dengan menggunakan metode weighted [4]. Metode ini pada elemen green memberikan kontribusi yang lebih besar dan pada elemen red dan blue dilakukan pengurangan kontribusi pada setiap pikselnya dengan pemberian nilai pada masing-masing elemen warna adalah sebesar 30% red, 59% green, dan 11% blue. Berikut merupakan persamaan dari metode weighted:
Grayscale = R * 0.299 + G * 0.587 + B * 0.114
(1)
Keterangan:
R = intensitas warna merah/red
G = intensitas warna hijau/green
B = intensitas warna biru/blue
-
2.4. Binarization
Binarization adalah proses mengubah citra berderajat keabuan (grayscale) menjadi citra biner atau hitam putih sehingga dapat diketahui daerah mana yang termasuk objek dan background dari citra secara jelas. Citra biner merupakan citra yang hanya memiliki dua kemungkinan nilai piksel, yaitu hitam dan putih [3]. Nilai 0 menyatakan warna hitam dan nilai 1 menyatakan warna putih. Pada proses thresholding, akan ditetapkan suatu nilai yang disebut threshold yang merupakan batas nilai dalam menentukan warna pada citra apakah berada di atas nilai ambang atau di bawah.
,(„,J1 iff(χ.y)≥τ (2)
3 'y' 10 lff(x,y)<T (2)
Keterangan :
g(x,y) : citra biner dari citra grayscale f(x, y)
T : nilai ambang
Ada berbagai macam metode thresholding, salah satunya adalah metode Sauvola. Metode Sauvola adalah algoritma thresholding yang termasuk ke dalam local thresholding. Adapun persamaan metode Sauvola adalah sebagai berikut [5]:
Tsauvola = m* (1 + k * (1 --)) (3)
r
Keterangan:
m : mean dari piksel tetangga di bawah area jendela r : rentang dinamis dari standar deviasi
k : konstanta dari 0-1
s : pixel yang akan diubah
-
2.5. Noise Reduction
Karakteristik derajat keabuan (gray-level) atau karakteristik Fungsi Probabilitas Kepadatan (Probability Density Function (PDF)) menyebabkan variable acak yang terjadi dapat menyebabkan noise pada sebuah citra. Untuk dapat mengekstrak fitur-fitur penting yang terkandung pada citra, maka perlu dilakukan reduksi noise. Salah satu teknik untuk mereduksi noise yaitu menggunakan mean filter. Menurut Hidayatullah, Mean filter adalah filter yang beroperasi dengan cara menginterasikan sebuah kernel dengan ukuran tertentu dari pojok kiri atas sampai pojok kanan bawah citra [6]. Setiap iterasi nilai piksel pada citra yang posisinya tepat di tengah-tengah kernel akan diganti dengan nilai rata-rata dari nilai piksel citra yang berada di dalam jendela tersebut. Luasan jumlah piksel tetangga ditentukan sebagai masking/kernel/window yang misalnya berukuran 2x2, 3x3, 4x4, dan seterusnya.
-
2.6 Edge Detection
Proses ini bertujuan untuk mendapatkan tepi dari area teks. Proses ini akan diterapkan dengan menggunakan operator pendeteksian tepi yaitu operator Sobel. Operator sobel adalah operator yang menggunakan dua kernel 3x3 Gx dan Gy dan untuk magnitudo gradient (G) sebagai berikut:
Γ -1 0 11 [-1 -2 -11 ____________
Gx = I-2 0 2∣ Gy= I 0 0 0∣ G =√I *G½ + I *Gy
(4)
-1 0 1 1 2 1
Penerapan operator Sobel dilakukan dengan mengkonvolusikan citra dengan kernel Gx dan Gy. Setelah dilakukan konvolusi dengan dua kernel yang berbeda, citra hasil konvolusi Gx dan Gy dikuadratkan kemudian dijumlahkan. Setelah dijumlahkan, hasil penjumlahan diambil akar kuadratnya. Akar kuadrat tersebut merupakan citra hasil penerapan operator Sobel.
-
2.7 A * Path Planning
Algoritma A * Path Planning menggunakan beberapa fungsi heuristik untuk mempercepat perhitungan solusi optimal untuk mencapai keadaan tujuan [7]. Tujuan dari algoritma ini adalah meminimalkan jumlah biaya pada path yang dilalui dari keadaan awal (s1) menuju keadaan akhir (sn). Misalkan terdapat serangkaian state sa,sa, ^,s^ yang dilalui oleh path pa, maka untuk menghitung jalur optimal p* dengan total biaya perjalanan terendah digunakan persamaan:
p* = argmin∑nr 1 C(s1α,s1α+1) pu
(5)
Dimana C(si,sj) adalah cost untuk pergi dari posisi awal ke posisi akhir. Dalam menghitung C(si,sj∙) yaitu biaya perjalanan dari suatu keadaaan sampai tercapainya keadaan tujuan digunakan lima fungsi biaya. Fungsi-fungsi biaya ini digabungkan untuk menghitung biaya perjalanan dari suatu keadaan sampai keadaan tujuan tercapai [7].
-
a. Fungsi biaya jarak foreground D(n) dan D(n)2 mengontrol jalur agar tetap berada di celah antara piksel foreground. Fungsi D(n) merupakan fungsi untuk melewati state n, dimana didefinisakan pada rumus di bawah:
D(ri) =
1
1+min[d(n,nyu),d(n,ny^)]
(6)
Fungsi D(n)2 merupakan atribut biaya yang jauh lebih tinggi untuk mendekati nilai piksel dibandingkan dengan menjau dari piksel hitam. D(n)2 didefinisikan seperti di bawah :
D(n) 2 =
1
1+min[d(n,nyu),d(n,nyd)]2
(7)
d(n,nyu) dan d(n,nyd) adalah jarak antara state n dan piksel foreground terdekat masing-masing dalam arah ke atas dan ke bawah [8].
-
b. Map-obstacle cost function M(n) yang memberi tanda apabila path harus melewati piksel foreground. M(n) akan bernilai 1 jika state n bertepatan dengan foreground piksel. M(n) akan bernilai 0 untuk kondisi sebaliknya.
-
c. Vertical cost function V(n) mencegah jalan menyimpang dari posisi y dari keadaan awal dan keadaan tujuan.
V(ri) =abs(ny-nystart)
(8)
ny dan nystart merupakan posisi y pada state saat ini dan state awal.
-
d. Neighbor cost function N(si,sj) yaitu untuk mengatur jalur terpendek antara keadaan awal dan tujuan. Ketika berpindah ke state baru, nilai N(si,sj) adalah 14 untuk arah diagonal, dan bernilai 10 untuk langkah vertikal dan horizontal.
Maka rumus untuk algoritma A * Path Planning yaitu menggunakan fungsi biaya gabungan C(si , sj) :
C(si,sj) = cdD(si) + cd2D(si)2+cmM(si) + cvV(si) + CnN(si,sj) (9)
cd, cd2, cm, cv, cn disesuaikan dengan menggunakan beberapa gambar selama percobaan pendahulu.
Pada tahap ini akan dilakukan pengujian dengan menggunakan confusion matrix atau disebut juga matriks klasifikasi adalah suatu metode yang biasanya digunakan untuk melakukan perhitungan akurasi pada konsep data mining [9]. Format dari confusion matrix dapat dilihat pada Gambar 3.
Observed
Predicted
|
TRUE |
FALSE | |
|
TRUE |
TRUE POSITIVE (TP) |
FALSE POSITIVE (FP) |
|
FALSE |
FALSE NEGATIVE (FN) |
TRUE POSITIVE (TP) |
Gambar 3. Format Confusion Matrix
Definisi dari ketentuan yang digunakan yaitu :
-
a. True Positive (TP)
-
b. True Negative (TN)
: Pengamatan positif, tetapi diperkirakan negatif.
: Pengamatan negatif, dan diperkirakan negatif.
c. False Positive (FP)
: Pengamatan negatif, tetapi diperkirakan positif.
d. False Negative (FN) : Pengamatan positif, tetapi diperkirakan negatif.
Hasil klasifikasi mempunyai kemungkinan yang benar dalam kelasnya (TP dan TN) atau salah yang akan masuk ke kelas lainnya (FP dan FN). Hasil pengukuran dapat diperoleh dengan melihat pada format confusion matriks di atas pada Gambar 3. Akurasi dari pengklasifikasian yang merupakan jumlah
record data yang diklasifikasikan (prediksi) secara benar oleh algortma diperoleh dari formula:
Akurasi =
TP+TN
TP+TN+FP+FN
(10)
Presentase jumlah record data yang diklasifikasikan prediksi secara salah oleh algoritma disebut Misclassification (Error) Rate, yang dihitung dengan rumus:
Misclassification Rate =
FP+FN
TP+TN+FP+FN
(11)
Penelitian mengenai segmentasi baris ini diimplementasikan menggunakan bahasa pemrograman Python. Data yang digunakan dalam penelitian ini adalah 24 citra lontar Bali dengan format JPG. Pada tahap pertama akan dilakukan proses cropping citra secara manual. Cropping dilakukan agar seluruh data citra yang digunakan sebagai citra masukan memiliki ukuran piksel yang digunakan sama. Gambar 4 menunjukan citra lontar yang sudah melalui proses cropping.
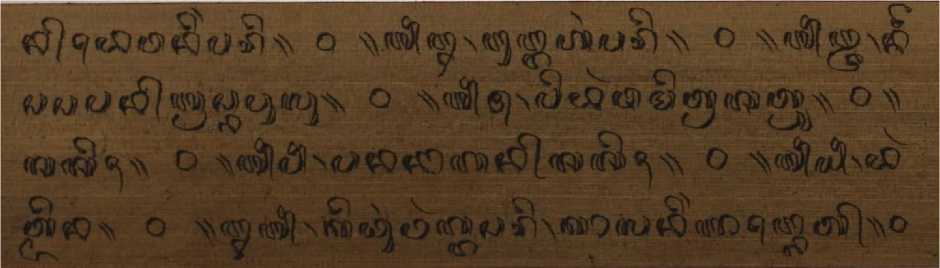
Gambar 4. Lontar yang sudah melalui proses cropping
Setelah itu, citra akan masuk ke tahap preprocessing, dimana pada tahap ini terdapat proses grayscalling dan binarization. Untuk memudahkan proses denoising, peneliti akan mengubah citra RGB menjadi citra keabuan atau citra grayscale dengan menggunakan metode weighted. Kemudian dilanjutkan dengan proses binarization atau proses mengubah citra grayscale menjadi citra biner atau citra hitam putih. Gambar 5 adalah gambar hasil dari proses grayscale yaitu citra keabuan dan hasil dari proses binarization yaitu citra biner.
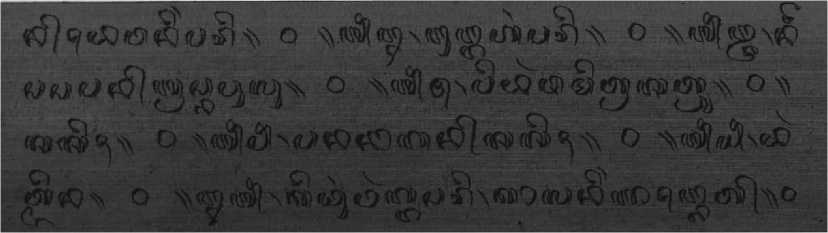
Gambar 5. Citra yang sudah melalui proses preprocessing
Selanjutnya citra biner akan masuk ke tahap noise reduction menggunakan mean filter. Dimana pada proses dilakukan untuk mereduksi gangguan yang ada pada citra. Setelah itu dilanjutkan dengan proses edge detection dengan menggunakan operator sobel sebagai proses pencarian tepi aksara. Gambar 6 menunjukan citra hasil noise reduction menggunakan mean filter dan citra hasil edge detection dengan menggunakan operator sobel.
Gambar 6. Citra yang sudah melalui proses noise reduction dan edge detection
Proses terakhir adalah segmentasi baris. Proses ini menggunakan metode A * Path Planning untuk memperoleh baris aksara pada citra lontar. Gambar 7 merupakan hasil dari proses segmentasi baris menggunakan metode A * Path Planning.
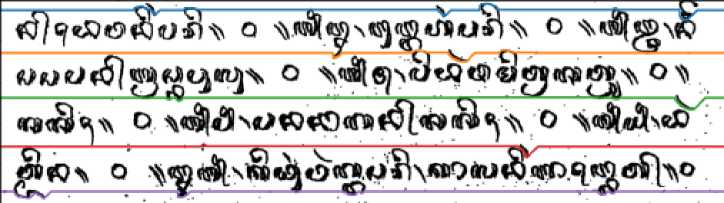
Gambar 7. Citra yang sudah melalui proses segmentasi baris
Untuk mengetahui apakah proses segmentasi baris berjalan dengan baik dilakukan pengujian dengan menghitung kejadian dimana terdapat karakter aksara yang tersegmentasi di baris yang tidak seharusnya. Perhitungan kejadian dilakukan dengan menggunakan metode confusion matrix dengan memerhatikan kelas False Positive (FP) dan False Negative (FN). Nilai dari FP dan FN akan digunakan untuk menghitung Misclassification Rate dari proses segmentasi baris dengan menggunakan metode A * Path Planing.
Tabel 1. Hasil Pengujian Segmentasi Baris
|
No |
Data |
Baris |
Jumlah Karakter pada Baris |
False Positive (FP) |
False Negative (FN) |
Miss-classification Rate |
Akurasi per Baris |
Akurasi Data |
|
1 |
Lontar1 |
Baris 1 |
28 |
0 |
1 |
0.138 |
0.862 |
0.923 |
|
Baris 2 |
30 |
0 |
0 |
0.064 |
0.935 | |||
|
Baris 3 |
26 |
2 |
0 |
0.074 |
0.926 | |||
|
Baris 4 |
32 |
0 |
2 |
0.031 |
0.969 | |||
|
2 |
Lontar2 |
Baris 1 |
42 |
0 |
1 |
0.024 |
0.976 |
0.974 |
|
Baris 2 |
33 |
0 |
0 |
0.000 |
1.000 | |||
|
Baris 3 |
37 |
1 |
0 |
0.026 |
0.974 | |||
|
Baris 4 |
37 |
0 |
1 |
0.028 |
0.947 |
|
3 |
Lontar12 |
Baris 1 |
41 |
0 |
1 |
0.024 |
0.976 |
0.969 |
|
Baris 2 |
42 |
0 |
0 |
0.000 |
1.000 | |||
|
Baris 3 |
41 |
2 |
0 |
0.047 |
0.953 | |||
|
Baris 4 |
37 |
0 |
2 |
0.054 |
0.946 |
Berdasarkan pada pengujian 24 buah citra lontar yang telah melalui proses cropping terlebih dahulu maka diperoleh hasil akurasi segmentasi baris sebesar 95%. Masing-masing baris aksara yang tersegmentasi memiliki tingkat akurasi yang beragam, namun tidak ada satupun hasil pengujian yang menghasilkan akurasi dibawah 90%, dimana akurasi citra memberikan hasil pengujian antara 90% -98%.
Dari penelitian yang dilakukan dapat disimpulkan bahwa metode A * Path Planning dapat digunakan untuk segmentasi baris pada citra lontar Bali. Berdasarkan hasil pengujian menggunakan confusion matrix diperoleh tingkat akurasi sebesar 95%. Hal ini menunjukan bahwa metode A * Path Planning pada proses segmentasi baris sudah berjalan dengan baik. Dalam penelitian ini, terdapat beberapa hal yang bisa dilakukan di penelitian selanjutnya yaitu pemisahan latar belakang dan tulisan pada lontar ketika latar belakang tidak seperti latar belakang lontar pada umumnya. Selain itu, perlu adanya penambahan proses agar citra yang dihasilkan dapat terbaca dengan jelas dan sedikit noise.
Referensi
-
[1] I. W. Suardiana, Teknik Konservasi Lontar, Denpasar: Dinas Kebudayaan Provinsi Bali, 2021.
-
[2] A. Wedianto, H. L. Sari, & H. Y. Suzantri, “Analisa Perbandingan Metode Filter Gaussian, Mean Dan Median Terhadap Reduksi Noise” Jurnal Media Infotama, vol. 12, no. 1, p. 21–30. 2016. https://doi.org/https://doi.org/10.37676/jmi.v12i1.269
-
[3] D. Salomon, “The Computer Graphics Manual”, 2011. https://doi.org/10.1007/978-0-85729-886-7
-
[4] D. Putra, Pengolahan citra digital, Penerbit Andi, 2010
-
[5] M. P. J. Sauvola*, & K. Inen, “Adaptive degraded document image binarization”. Pattern
Recognition, vol. 39, no. 3, p. 317–327, 2006. https://doi.org/10.1016/j.patcog.2005.09.010
-
[6] P. Hidayatullah, Pengolahan Citra Digital: Teori dan Aplikasi Nyata, Informatika, 2017
-
[7] O. Surinta, M. Holtkamp, F. Karabaa, J. P. Van Oosten, L. Schomaker, & M. Wiering, “A Path
Planning for Line Segmentation of Handwritten Documents”. Proceedings of International Conference on Frontiers in Handwriting Recognition, ICFHR, 2014-December, p. 175–180, 2014. https://doi.org/10.1109/ICFHR.2014.37
-
[8] Kesiman, M. W. A., Valy, D., Burie, J.-C., Paulus, E., Sunarya, I. M. G., Hadi, S., … Ogier, J.-M. (2016). Southeast Asian palm leaf manuscript images: a review of handwritten text line segmentation methods and new challenges. Journal of Electronic Imaging, 26(1), 011011. https://doi.org/10.1117/1.jei.26.1.011011
-
[9] Rahman, M. F., Alamsah, D., Darmawidjadja, M. I., & Nurma, I. (2017). Klasifikasi Untuk Diagnosa Diabetes Menggunakan Metode Bayesian Regularization Neural Network (RBNN). Jurnal Informatika, 11(1), 36. https://doi.org/10.26555/jifo.v11i1.a5452
This page is intentionally left blank.
358
Discussion and feedback