RANCANG BANGUN KLINOSTAT 2-D DENGAN PEROTASI MOTOR DC D06D401E
on
Rancang Bangun Klinostat 2-D Dengan Perotasi Motor DC D06D401E
I Made Oka Guna Antara, I Wayan Supardi, Ni Nyoman Rupiasih
RANCANG BANGUN KLINOSTAT 2-D DENGAN PEROTASI MOTOR DC D06D401E
I Made Oka Guna Antara1, I Wayan Supardi1, Ni Nyoman Rupiasih1
Sampai saat ini, gaya gravitasi adalah satu-satunya faktor fisik yang tetap konstan sepanjang sejarah evolusi dan karenanya dapat memainkan peran utama dalam proses evolusi. Dalam hal ini, gaya
gravitasi adalah faktor lingkungan yang mempengaruhi hampir semua kehidupan di planet ini baik secara langsung ataupun tidak langsung. Semua sistem biologis telah berkembang sesuai dengan gaya tersebut. Ilmu biologi gravitasi telah
mengambil langkah maju yang luar biasa dengan program eksperimen luar angkasanya. Eksperimen-eksperimen ini memberikan kesempatan untuk
mempelajari organisme yang hidup di lingkungan gravitasi rendah atau microgravity (gravitasi berorde mikro = mikro-gravitasi) (Santosh Bhaskaran, et. al., 2009).
Di bumi, eksperimen-eksperimen mikro-gravitasi dapat disimulasikan dengan menggunakan klinostat (Brown, R. B., 1999). Peneliti menggunakan alat tersebut untuk meniadakan atau memperkecil efek gravitasi dengan menyamakan vektor gravitasi di sekitar sumbu horizontal.
Untuk tujuan yang sama, pada penelitian ini telah dibuat klinostat 2-D dengan memanfaatkan kecepatan putar motor arus searah (direct current (DC)) untuk mensimulasikan keadaan atau lingkungan mikro-gravitasi. Klinostat
dibuat dengan perotasi motor DC dan pengatur kecepatan menggunakan catu daya variabel. Motor DC adalah motor yang berfungsi mengubah tenaga listrik arus searah menjadi gerak atau energi mekanik (Budiharto, W., 2014). Kecepatan rotasi dari motor DC dipengaruhi oleh arus dan tegangan yang diberikan. Alat yang dapat mengatur putaran motor DC diantaranya mikrokontroler atau dapat menggunakan catu daya variabel dengan memvariasikan arus dan tegangan. 26
-
II. TINJAUAN PUSTAKA
Mikro-gravitasi (microgravity) adalah kondisi dimana nilai percepatan gravitasi bumi (g) sangat kecil yaitu dalam orde mikro atau 10-6 dari nilai g. g adalah satuan percepatan rata-rata gravitasi bumi yang menunjukkan rata-rata percepatan yang dihasilkan medan gravitasi pada permukaan bumi (permukaan laut). Dalam fisika, nilai percepatan gravitasi rata – rata atau nilai g pada permukaan bumi (permukaan laut) didefinisikan sebagai 9,80 m/s2 (NASA, 2012).
Klinostat diciptakan untuk memungkinkan rotasi konstan suatu objek, di sekitar sumbu tegak lurus terhadap gaya gravitasi. Beberapa jenis klinostat telah dikembangkan, diantaranya klinostat dengan jumlah sumbu rotasi yang berbeda seperti satu sumbu dan 2 sumbu, serta klinostat dengan mode operasi seperti kecepatan dan arah rotasi yang berbeda (United Nations, 2013).
Analisis pergerakan klinostat didasarkan pada mekanika klasik mengenai rotasi dan kerangka non-inersia (Arya, A. P., 2011). Kerangka klinostat diputar dengan kelajuan sudut yang sama dengan sumbu putar, seperti tampak pada Gambar 2.1.
Pada suatu kerangka koordinat, untuk sistem yang diputar berlaku persamaan (I.W Fathona, dkk, 2011):
dimana F merupakan gaya relatif terhadap kerangka acuan yang diam, F′ merupakan gaya relatif terhadap kerangka acuan yang
F‘ = F - Fc - Fcor - F" (2.1)
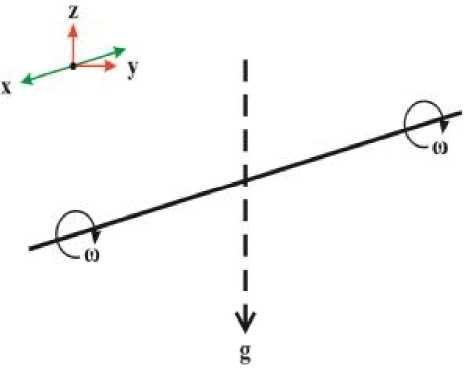
Gambar 2.1 Klinostat 2-D yang dibangun dengan satu poros, yaitu depan dan belakang;
keduanya diputar dengan kecepatan sudut ω.
berputar (gaya fiktif), Fc merupakan gaya sentrifugal, F″ adalah gaya yang diakibatkan oleh perubahan kecepatan putar terhadap waktu dan Fcor adalah gaya Coriolis yang timbul ketika partikel bergerak pada kerangka yang diputar. Pada dasarnya, sistem rotasi pada klinostat dianalogikan dengan dua buah kerangka koordinat dimana XYZ merupakan kerangka yang diam dan XY′Z′ kerangka yang diputar seperti tampak pada Gambar 2.2. Titik nol dari kedua kerangka koordinat tersebut berhimpit. Misalkan kerangka Y′Z′ bergerak dengan kecepatan sudut konstan ω dan ditempatkan sebuah partikel di titik P dengan vektor A.
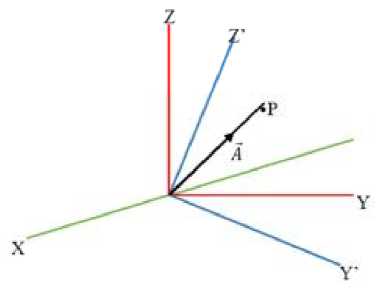
Gambar 2.2 Kerangka koordinat acuan XYZ yang diam dan Y′Z′ yang diputar.
Pada sistem ini, partikel tidak bergerak terhadap kerangka koordinat yang berputar sehingga gaya Coriolis (Fcor) sama dengan nol, F″ sama dengan nol karena kecepatan putar kerangka
koordinat ω dibuat tetap, dan diasumsikan tidak ada gaya gesek ataupun pengaruh gaya dari luar sehingga F sama dengan nol. Dengan demikian gaya yang dialami partikel hanya gaya sentrifugal yang mengarah menjauhi sumbu putar secara radial, yang besarnya adalah:
Fc = mω 2r (2.2)
dimana m adalah massa dan r adalah jari-jari. Untuk menentukan besar gaya sentrifugal pada sistem, didefinisikan gaya sentrifugal relatif (Relative Centrifugal Force (RCF)) yaitu perbandingan gaya sentrifugal terhadap gaya gravitasi (Sagar Shankar Jagtap, et al., 2011), seperti persamaan 2.3.
2
RCF = c = — (2.3)
Fg 980
dimana ω adalah kecepatan putar kerangka koordinat (kecepatan sudut) dalam satuan
radian/detik, r adalah jari-jari dalam satuan cm, dan RCF dalam satuan g (percepatan gravitasi bumi). Konversi satuan ω dari radian/detik menjadi putaran per menit (rpm) dengan menggunakan persamaan (2.4)
π
ω = —ω' (2.4)
30
dimana ω' adalah kecepatan sudut dalam satuan rpm. Substistusi persamaan (2.4) ke dalam (2.3) maka diperoleh
RCF = 1,118x 10-5(ω')2 r (2.5)
Pelaksanaan penelitian dibagi dalam beberapa tahap, yaitu perancangan, pembuatan, perakitan, uji coba alat, kalibrasi, dan pengolahan data, seperti tampak pada Gambar 3.1 dan 3.2 Klinostat 2-D.
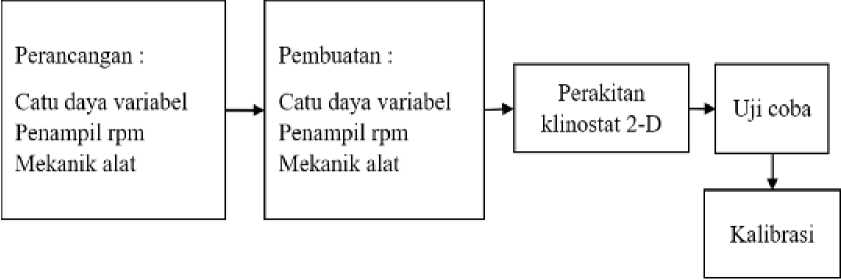
Gambar 3,1 Diagram blok perancangan klinostat
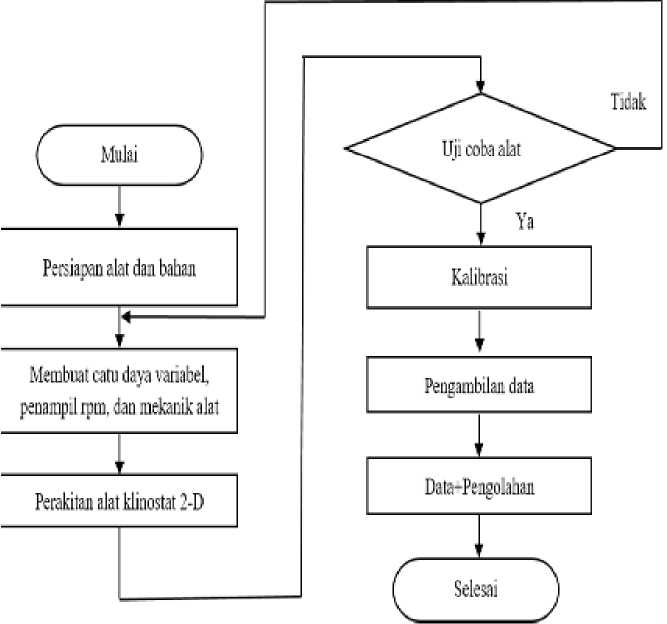
Gambar 3.2 Diagram alir pembuatan klinostat dan proses pengolahan data
-
IV, HASIL DAN PEMBAHASAN
Klinostat 2-D, yang merupakan hasil rancangan diperlihatkan pada Gambar 4.1. Prinsip kerja dari alat tersebut adalah memanfaatkan gaya sentrifugal yang diperlihatkan pada Gambar 2.1, sehingga pada penerapannya untuk mencari Relative Centrifugal Force (RCF) atau gaya sentrifugal relatif akan bergantung terhadap kecepatan sudut. Kecepatan sudut dibuat dengan menggunakan perotasi motor DC D06D401E yang dikendalikan oleh catu daya variabel dengan memvariasikan tegangannya. Sedangkan, untuk mengetahui berapa besar kecepatan
sudut yang didapatkan maka dibuat penampil rpm (kecepatan sudut). Pembacaan kecepatan sudut dilakukan dengan menggunakan encoder, dan modul DI Rotary Encoder Versi 1 (DI-REV#1). Keluaran dari modul sudah berupa high dan low (depokinstrument.com, 2010), kemudian akan dibaca oleh kaki ke-2 mikrokontroler ATmega16 yang berfungsi sebagai timer/counter 16 Bit. Setelah data diterima, data tersebut diolah didalam ATmega16 yang sebelumnya sudah diprogram menggunakan CVAVR dan hasil dari pengolahan data tersebut kemudian ditampilkan pada LCD 2x16.

Gambar 4.1 Hasil rancangan alat klinostat 2-D dengan perotasi motor DC D06D401E. 1) Penampil rpm, 2) Tempat sampel uji dan sampel acuan, 3) Catu daya variabel, dan 4) Perangkat keras
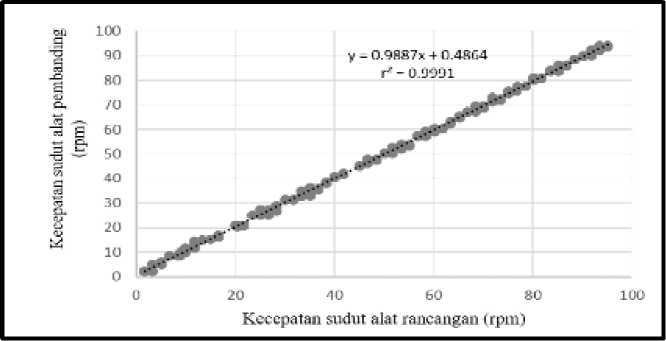
Pengujian alat dilakukan dengan beberapa tahapan, dimulai dengan mengkalibrasi penampil rpm terhadap alat referensi yaitu digital tachometer DT-2234C+. Dari hasil uji tersebut diperoleh
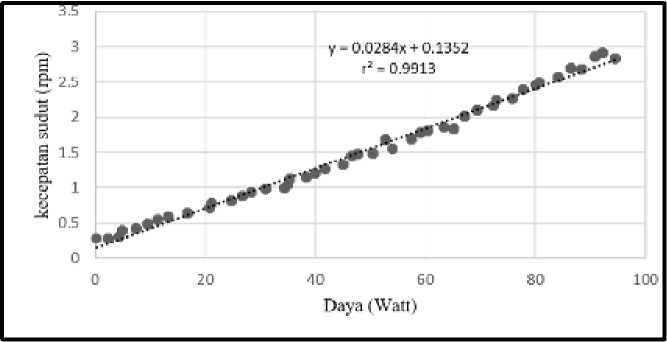
kelinieritasan antara kecepatan sudut alat rancangan dengan alat referensi yang terlihat pada Gambar 4.2a. Pada Gambar 4.2b diperoleh grafik kelinieritasan antara daya dengan kecepatan sudut alat rancangan.
(a)
(b)
Gambar 4.2 Grafik kelinieran data antara: (a) Kecepatan sudut alat rancangan dengan alat pembanding, (b) Daya keluaran dengan kecepatan sudut alat
Selanjutnya dilakukan perhitungan untuk mendapatkan nilai RCF dengan menggunakan persamaan (2.5), dan hasilnya ditampilkan pada Gambar 4.3 yaitu grafik antara RCF dengan kecepatan
sudut alat. Tampak bahwa, nilai kecepatan sudut (ω') terkecil alat adalah (1,67±0,409065) rpm, yang sama dengan nilai RCF sebesar (4,68±0,281)×10-5 g,
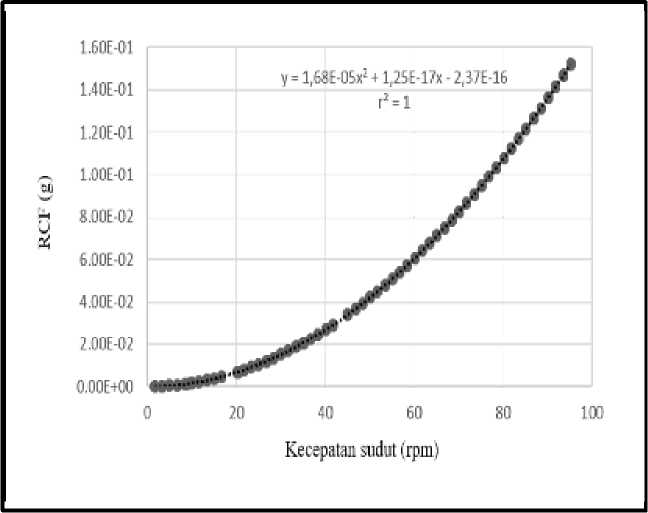
Gambar 4.3 Grafik antara RCF dengan kecepatan sudut alat, yang memenuhi persamaan polynomial orde 2.
dengan keakuratan kecepatan sudut alat ( ω') dengan alat pembanding digital tachometer DT-2234C+ (ω'ref) adalah 99,91%, dan kelinieritasan antara daya dengan kecepatan sudut alat adalah 99,13%. Pada grafik tampak bahwa antara RCF dengan kecepatan sudut alat memenuhi persamaan polynomial orde 2.
Pada penelitian ini dapat disimpulkan bahwa telah berhasil dibuat klinostat 2-D dengan menggunakan perotasi motor DC D06D401E dan pengatur kecepatan putar catu daya variabel. Nilai kecepatan sudut (ω') terkecil alat adalah (1,67±0,409065) rpm, yang sama dengan nilai Relative Centrifugal Force (RCF) sebesar (4,68±0,281)×10-5 g, dengan keakuratan
kecepatan sudut alat (ω') dengan alat pembanding digital tachometer DT-2234C+ (ω'ref) adalah 99,91%, dan kelinieritasan antara daya dengan kecepatan sudut alat adalah 99,13%.
DAFTAR PUSTAKA
Arya, A. P., 2011, Introduction to
Classical Mechanics, 2nd Ed., Prentice Hall, New Jersey, 1998; J. Oto. Ktrl. Inst (J. Auto. Ctrl. Inst) Vol 3 (1), 2011, 37-40
Budiharto, W., 2014, Robotika Modern, Penerbit ANDI Yogyakarta,
Yogyakarta, 24-35; 54-55
Brown, R. B., 1999, Effects Of Space Flight, Clinorotation,And
Centrifugation On The Growth And Metabolism Of Escherichia coli, University of Colorado, Colorado, 89
-
I .W Fathona, dkk., 2011, Klinostat Tiga Dimensi sebagai Simulator
Mikrogravitasi untuk Berbagai
Eksperimen Tanpa Bobot,
J.Oto.Ktrl.Inst (J. Auto.Ctrl.Inst), Vol 3 (1), 37-40
Sagar Shankar Jagtap, Rupali B. Awhad, B. Santosh, Pandit B. Vidyasagar, 2011, Effects of Clinorotation on Growth and Chlorophyll Content of Rice Seeds, Microgravity Science and Technology Volume 23, Issue 1, pp. 41-48
Santosh Bhaskaran, Sagar S. Jagtap, Pandit B. Vidyasagar, 2009, Life and Gravity, Biophysical Reviews and Letters Vol. 4, No.4 (2009) 299-318
_________ , depokinstrument.com, 2010, DI-REV1 [di-ay-ref-wan] / (DIRotary Encoder Versi #1),
http://depokinstruments.com/2010/0 3/25/produk-baru-di-rev1-di-rotary-encoder-versi-1/ [Diakses pada 19 Februari 2015 pukul 13.02.32
WITA]
_________, NASA, 2012, What is Microgravity?, http://www.nasa.gov/audience/forstu dents/5-8/features/what-is-microgravity-
58.html#.VOrDQtKUeE4, [Diakses pada tanggal 23 Februari 2015 pukul 14.20.00 WITA]
_________ , United Nations, 2013, Teacher’s Guide To Plant
Experiments In Microgravity, New York, New York, 11-13,44
33
Discussion and feedback