PERANCANGAN ROBOT PENGHINDAR HALANGAN MENGGUNAKAN SENSOR ULTRASONIK BERBASIS MIKROKONTROLER AT89S51
on
Perancangan Robot Penghindar Halangan Menggunakan Sensor Ultrasonik
(I Wayan Supardi,dkk)
PERANCANGAN ROBOT PENGHINDAR HALANGAN MENGGUNAKAN SENSOR ULTRASONIK BERBASIS MIKROKONTROLER AT89S51
Supardi I Wayan1, Wendri Nyoman1, Sarasmitha, N. L. P.1
Penelitian di bidang elektronika khususnya pembuatan robot semakin banyak dilakukan, mengingat aplikasi robot dalam kehidupan sehari-hari dan bidang industri semakin banyak dibutuhkan. Beberapa penerapan teknologi robot diantaranya adalah merakit dan mengelas kerangka mobil
di industri manufaktur, pencari dan pemadam sumber api, robot boneka, robot medis, robot perang, robot penjelajah dan lain-lain. Kemampuan robot tidak terlepas dari apa yang disebut dengan sensor, dimana sensor merupakan alat untuk mendeteksi dan mengubah besaran-besaran mekanis seperti energi, frekuensi, menjadi tegangan listrik.
Ada beberapa komponen yang harus digunakan dalam perakitan sebuah robot, diantaranya motor DC, mikrokontroler, serta rangkaian sensor. Khusus mengenai komponen sensor deteksi, juga terdapat beberapa macam sensor, seperti sensor infra merah, sensor ultrasonik, dan lain-lain. Berdasarkan latar belakang di atas, penulis mencoba merancang robot yang dapat bergerak maju, berbelok kekanan atau kekiri jika dihadapannya terdapat penghalang, dengan menggunakan sensor ultrasonik dan mikrokontroler AT89S51.
-
II. TINJAUAN PUSTAKA
Karakteristik gelombang ultrasonik yang melalui medium mengakibatkan partikel bergetar dan berlangsung sepanjang arah penjalaran gelombang secara longitudinal sehingga menyebabkan partikel medium membentuk rapatan dan regangan. Terjadinya rapatan dan regangan di dalam suatu medium disebabkan oleh getaran partikel secara periodik selama gelombang ultrasonik melaluinya, (Tipler, 1998). Gelombang ultrasonik dapat menjalar dari satu medium ke medium yang lain. Pada medium gas, kecepatan gelombang bunyi dirumuskan seperti terlihat dalam persamaan 2.1 :
γRT ν=
M dimana :
ν = Kecepatan gelombang bunyi (m/s) γ = Perbandingan kapasitas panas pada tekanan dan volume konstan
R = Konstanta gas ideal = 8,314472 J/mol.K
T = Suhu (K)
M = Massa molar gas (kg/mol)
Jika dua gelombang merambat melalui dua medium, maka panjang gelombang dan kecepatannya akan berbeda.
Transduser adalah sebuah alat yang bila digerakkan oleh suatu energi di dalam sebuah sistem transmisi, akan menyalurkan energi tersebut dalam bentuk yang sama atau dalam bentuk yang berlainan ke sistem transmisi berikutnya. Transmisi energi ini bisa berupa listrik, mekanik, kimia, optik (radiasi), atau panas (thermal). Sifat bahan piezoelektrik adalah menghasilkan muatan listrik jika diberi perlakuan mekanik. Sebaliknya, jika bahan ini diberi tegangan listrik maka akan terjadi perubahan ketebalan (mengembang dan mengkerut). Material yang biasa digunakan sebagai elemen transduser adalah zirconate titanate (PZT). Elemen piezoelektrik mengubah energi listrik menjadi energi mekanik untuk menghasilkan ultrasonik dan energi mekanik menjadi energi listrik untuk mendeteksi ultrasonik.
Mikrokontroler AT89S51 merupakan salah satu jenis mikrokontroler keluarga MCS-51 yang memiliki Flash Programmable Erasable Read Only Memory ( Flash PEROM) internal. Perusahaan ATMEL mendapatkan lisensi dari Intel untuk mengembangkan mikrokontroler MCS-51, salah satu tipe yang diperkenalkan adalah AT89S51, (Andi Nalwan, 2003). Mikrokontroler AT89S51 menggunakan Flash PEROM. Berikut ini adalah pin-pin dari mikrokontroler AT89S51 seperti yang diperlihatkan pada Gambar 2.1.
|
1 |
-P1.0 |
VCC- |
21 |
|
-P1.1 |
P0.0- | ||
|
— P1.2 |
P0.1 - | ||
|
-P1.3 |
P0.2- | ||
|
. P1.4 |
P0.3- | ||
|
-P1.5 |
P0.4- | ||
|
-P1.6 |
P0.5- | ||
|
-P1.7 |
P0.6- | ||
|
-RESET |
P0.7- | ||
|
(RXD) - |
-P3.0 |
EAΛ∕PP- | |
|
(TXD) _ |
-P3.1 |
ALE/PROG- | |
|
INTO - |
— P3.2 |
PESEN- | |
|
INT 1 - |
— P3 3 |
P2.7- | |
|
(TO) _ |
-P3.4 |
P26- | |
|
(T1) - |
- P3.5 |
P25- | |
|
(WR) . |
-P3.6 |
P24- | |
|
(RD)- |
-P3.7 |
P23- | |
|
-XTAL2 |
P22- | ||
|
-XTAL1 |
P2.1 - | ||
|
-GND |
P2.0- | ||
|
20 |
40 |
Gambar 2.1 Susunan Pin Mikrokontroler AT89S51
Penelitian ini dilakukan di Laboratorium Elektronika dan Instrumentasi Fisika Universitas Udayana di Bukit Jimbaran. Waktu penelitian dilaksanakan pada bulan Maret 2010 sampai selesai
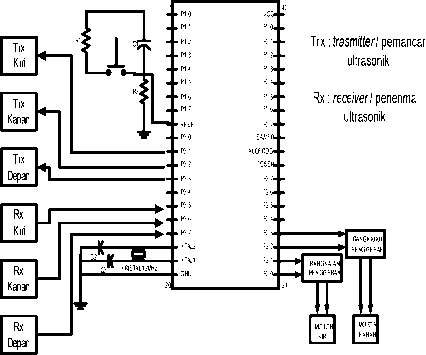
Untuk mempermudah merancang suatu sistem maka diperlukan suatu diagram blok sistematika penelitian. Dengan diagram blok dapat diketahui gambaran secara umum mengenai sistem yang akan dirancang. Diagram Blok robot penghindar halangan dapat dilihat pada Gambar 3.1

Gambar 3.1 Diagram Blok Robot Penghindar Halangan
Rangkaian sensor ultrasonik terbagi dalam beberapa bagian yaitu rangkaian pemancar ultrasonik dan rangkaian penerima
ultrasonik seperti yang diperlihatkan pada diagram blok Gambar 3.2.
PEMANCAR
GENERATOR -> ULTRASONIK
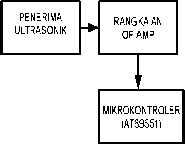
Gambar 3.2 Diagram Blok Sensor Ultrasonik
-
3.2. Perangkat Lunak
Perangkat lunak disini dipergunakan untuk mengendalikan sistem pemrograman data dan pengambilan keputusan untuk pengontrolan dua buah motor DC. Sebelum pemrograman data harus dibuat diagram alir, diagram ini digunakan sebagai acuan antara cara kerja perangkat keras dengan perangkat lunak. Adapun diagram alir dari sistem robot penghindar halangan dapat dilihat pada Gambar 3.3
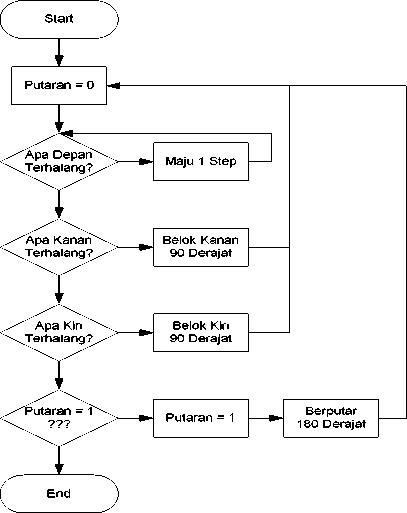
Gambar 3.3 Diagram Alir Robot Penghindar Halangan
Telah berhasil dibuat robot penghindar halangan menggunakan sensor ultrasonik berbasis mikrokontroler AT89S51.
Sistem kendali robot penghindar
halangan dengan sensor ultrasonik berbasis mikrokontroler AT89S51 yang dibuat dalam tugas akhir ini tampak seperti Gambar 4.2 dimana rangkaian penerima ultrasonik sebagai masukan dan rangkaian penggerak motor DC sebagai keluaran.
Dalam penelitian ini data yang diambil ialah jarak (s) dan tegangan (v), dimana pengambilan data dilakukan dengan mengatur jarak antara penghalang dengan sensor ultrasonik (sensor pemancar/transmitter (Trx) dan sensor penerima/receiver (Rx)), kemudian mengukur tegangan pada sensor penerima seperti yang ditunjukkan pada blok diagram Gambar 4.3.
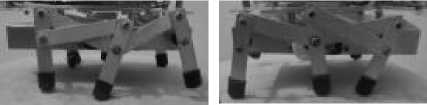
(a)
(b)
(c)
Gambar 4.1. Mekanik Robot Penghindar Halangana .a. Tampak Samping Kiri, b. Tampak Samping Kanan, c. Tampak Samping Kanan
Gambar 4.2 Rangkaian Sistem Kendali Robot Penghindar Halangan
Trx • —
Rx • →
Penghalang
Jarak
Gambar 4.3 Diagram Pengambilan Data
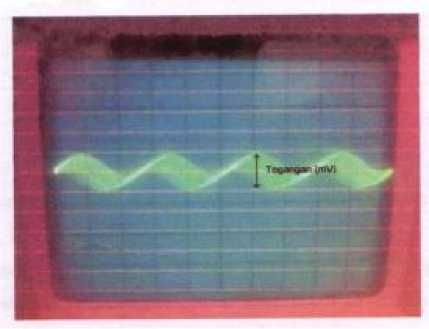
Gambar 4.4 Tegangan Pada Osiloskop
Tegangan yang diukur pada osiloskop ialah jarak amplitudo dari gelombang ultrasonik seperti yang terlihat pada Gambar 4.4. Secara umum tegangan yang diperoleh hampir sama untuk masing-masing sensor pada jarak yang sama. Hal tersebut
mengisyaratkan bahwa ketiga sensor berfungsi dengan baik. Seperti terlihat pada Gambar 4.5.
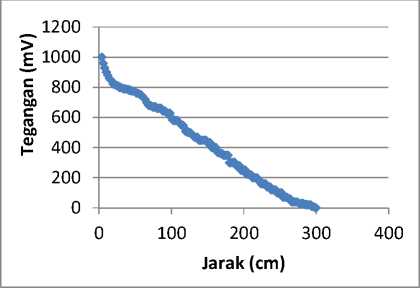
Gambar 4.5 Grafik Hubungan Jarak Dengan
Tegangan Sensor
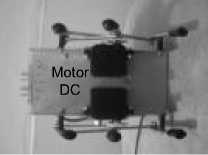
Dalam penelitian ini telah berhasil dibuat robot menggunakan sensor ultrasonik dengan frekuensi sebesar 40 kHz yang berbasis mikrokontroler AT89S51. Pada robot terdapat tiga pasang sensor ultrasonik yang masing-masing bekerja untuk mendeteksi keadaan di depan, sebelah kanan dan sebelah kiri.
Pada percobaan ini sensor pemancar dan sensor penerima ultrasonik diletakkan secara berdampingan, penghalang untuk robot digunakan triplek dengan ketebalan 3 mm. Sedangkan range jarak optimal sensor sehingga mampu memberi masukan ke mikrokontroler untuk membelokkan arah gerak robot adalah lebih kecil dari 10 cm atau pada tegangan lebih besar dari 900 mV. Robot penghindar halangan ini tidak dipengaruhi oleh suara-suara lain sehingga robot ini berfungsi dengan baik pada tiap kondisi, baik pada keadaan bising ataupun sunyi.
-
V. KESIMPULAN DAN SARAN
-
5.1. Kesimpulan
-
Berdasarkan penelitian yang telah dilakukan dapat diambil beberapa kesimpulan sebagai berikut :
-
1. Telah dibuat alat yang berupa robot penghindar halangan menggunakan sensor ultrasonik berbasis mikrokontroler
AT89S51.
-
2. Dalam robot penghindar halangan , sensor pemancar dan sensor penerima diletakkan secara berdampingan. Pada jarak 10 cm atau kurang dari 10 cm dimana tegangannya 900 mV atau kurang dari 900 mV robot akan berbelok.
Robot penghindar halangan ini bisa lebih disempurnakan lagi dengan penambahan perangkat atau rangkaian lain untuk kinerja yang lebih baik dan efisien. Sebagai contoh penambahan power supply cadangan untuk mengatasi keadaan saat listrik padam
DAFTAR PUSTAKA
Andi Nalwan, Paulus, 2003, Teknik
Antarmuka dan Pemrograman
Mikrokontroler AT89S51/52, Penerbit PT Elex Media Komputindo, Jakarta.
Budiharto, Widodo, 2006, Belajar Sendiri Membuat Robot Cerdas,. Penerbit PT Elex Media Komputindo, Jakarta.
Bueche, Frederick J, 1986, Fisika Untuk Universitas 2, Penerbit Bina Cipta, Jakarta.
Cameron, John R. dan Skofronick, James G, 1978, Fisika Tubuh Manusia, Penerbit EGC, Jakarta.
Halliday, David. dan Resnick, Robert, 1978, Fisika Jilid 2, Penerbit Erlangga, Bandung.
Heinrich, Kutruff, 1991, Room Acoustic, Penerbit Bina Cipta, Jakarta.
Sumanto, 1991, Elektronika Industri.
Penerbit Andi Offset, Jogjakarta.
Supardi, I Wayan, 2003, Perancangan dan
Realisasi Sistem Sensor Infra Merah
(Infra Red) Dalam Pengendalian Mobil Robot, Tesis S2, Jurusan Fisika FMIPA ITB.
11
Discussion and feedback